



Tema 2. Cinemática























Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: Física I, Profesor: Victòria Moreno, Carrera: Química, Universidad: UAB
Tipo: Apuntes
1 / 34

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Mecánica: parte de la física que estudia el
movimiento de los cuerpos y las causas que los
producen.
movimiento de los cuerpos, sin tener en cuenta las
causas que lo provocan.
movimiento con las causas que lo provocan.
La posición x de un cuerpo móvil se define siempre con respeto a un
sistema de referencia y es la distancia respecto el origen O. Puede ser
+, – y 0.
Al cabo de un intervalo de tiempo t = tf – ti , el cuerpo ha hecho un
cambio de posición que llamamos desplazamiento: x = xf – xi
Desplazamiento ≠ Distancia recorrida
indica variación (final – inicial) de la magnitud física, puede ser +, – y 0.
Dimensiones: [ t ]= T; [ x ]= L Unidades SI: t (s), x (m)
Es el cociente entre el
desplazamiento x y el
intervalo de tiempo t.
La velocidades pueden ser +,
Dimensiones:
[ vm ]= L/T
Unidades SI:
vm (m/s)
- Velocidad media:
final inicial
final inicial
t t
x x
t
x v (^) m
Interpretación geométrica:
En la curva de la posición x en función del tiempo t , la velocidad media es la pendiente de la recta que une el punto inicial P 1 (x 1 , t 1 ) y el punto final P 2 (x 2 , t 2 ).
- Movimiento rectilíneo uniforme (MRU):
v dt ^ dx
vconstante
x v( tt 0 ) x 0
x 0 dx^ vdt
Ecuación de la posición en función del tiempo.
v
v 0
t 0 t t
x
- Aceleración media:
t
v am
dt
dv
t
v a a t
m t
0 0
lim lim
- Aceleración instantánea:
2
2
dt
d x
dt
dx
dt
d
dt
dv a
Las aceleraciones pueden ser +, – y 0.
Dimensiones:
[ am ]= [ a ]= L·T-
Unidades SI:
am(m·s -2 ), a(m·s -2 )
- Movimiento rectilíneo uniformemente acelerado (MRUA):
dx ^ v dt
t
x 0
dt^ x
dx v
0 0 0
2 2 0
1 x a ( t t ) v ( t t ) x
v v 2 a x
2 0
2 x xx 0
Ecuación de la posición en función del tiempo.
Otra ecuación útil: donde
0 0
2 2
1 x a ( t ) v t x
Si t 0 = 0: 0 0
2 2
1 x at v t x
x x 0 a^ t^ t 0 v 0 dt
r xi y j
- Vector posición:
r r x y
Módulo del vector posición:
v i v j a i a j dt
d
dt
dv a
j v i v j dt
dy i dt
dx xi yj dt
d
dt
dr v
x y x y
x y
( ) ...
( )
- Vector velocidad y vector aceleración:
r dr dx dy dS
S dS
r dr dxi dy j
2 2
2 2 2 r x y z
r xi y j zk
- Vector posición: **- Vector velocidad y vector aceleración:
2 2 2 dr dx dy dz
dr dxi dy j dzk
v vxi vy j vzk a axi ay j azk
^
a a i a j i g j
v v i v j v θ i v θ j
r x i y j i j
x y
x y ^
0
cos sin
0 0
0 0 0 0 0
0 0 0
- Caída libre (sin rozamiento):
¿Cuáles son las ecuaciones de la velocidad y de la posición en función del tiempo? ¿Y de la trayectoria?
Condiciones iniciales (t 0 =0):
2 2
1 0
0
sin
cos
y v θ t gt
x v θ t
2 2 0
1 r r 0 v 0 ( t t 0 ) a(t t )
v v a t t v θ gt
v v a t t v θ
y y y
x x x
( ) sin
( ) cos
0 0 0
0 0 0 v v 0 a ( tt 0 )
(MRUA)
(MRU)
(MRUA)
2 2 2 0
2 cos
( ) tan ( x v θ
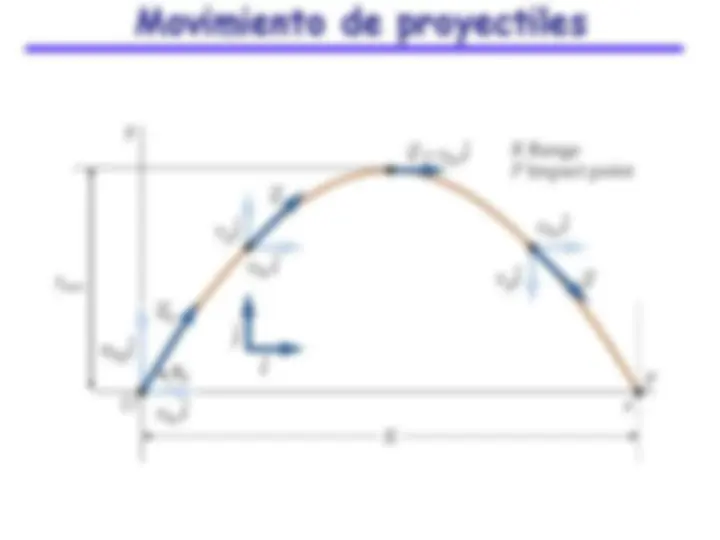
g Ecuación de la trayectoria: y^ x x^ θ
Ecuaciones de la velocidad y la posición:
y 0 g
v θ t
2 0 sin vol
Tiempo de vuelo , tvol:
sin 0
2 2
1 v 0 θ t gt
Alcance, R:
θ g
v θ θ g
v R x t v x tvol cos sin sin 2
2 0
2 0 vol 0
Altura máxima, ymax:
vy 0
θ g
v y
2
2 0 max sin 2
t tvol
0 v 0 sin θ gt g
v θ t
0 sin
Sustituyendo a:
2 2
1 y v 0 sin θ t gt
g
v θ g
v R
2 0
2 0 max sin^2 sin^2 θ ^1
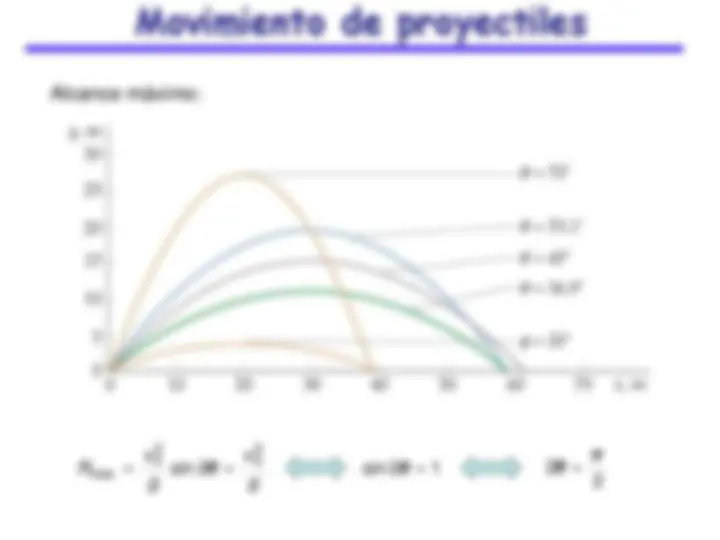
Alcance máximo:
2
2
π θ