


Curso
Fundamentos da Robótica e
Automação Industrial
A Educação é o primeiro passo para um futuro melhor.
Carga Horária: 45 horas


























































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
contem noções basicas para um curso de robotica
Tipologia: Slides
1 / 99

Esta página não é visível na pré-visualização
Não perca as partes importantes!
O bom aluno de cursos à distância:
[Do fr. Robot < tcheco robota, trabalhador forçado termo criado por Karel Capek, escritor tchecoslovaco (1890-1938).] S.m. Mecanismo automático, em geral com aspecto semelhante ao de um homem, e que realiza trabalhos e movimentos humanos. (Dicionário Aurélio)
A palavra Robô é derivada da palavra tcheca robota , que significa trabalhador compulsório, escravo, servo. Foi usada pela primeira vez pelo escritor tcheco Karel Capek no conto R.U.R Universal Robots, de 1921, para designar dispositivos mecânicos que, tendo aparência humana, mas sem sentimentos humanos, realizavam tarefas automáticas, repetitivas.
Nesse conto, estes robôs, eventualmente, faziam mais do que isso, destruindo seus criadores. Este tipo de robô humanóide é muito explorado na ficção científica. Hoje em dia, são as pesquisas japonesas que buscam desenvolver robôs-andróides, cada vez mais parecidos com os seres humanos, tanto do ponto de vista estético, quanto do comportamental.
Atualmente, a maioria dos robôs em uso está muito próxima de um dispositivo chamado que consiste em um braço mecânico controlado por uma pessoa ou automaticamente.
Aqui, abordaremos os robôs de uso industrial, utilizados na automação de tarefas comuns ao chão de fábrica, cujo surgimento e utilização se deveu à integração de dispositivos eletromecânicos de alta precisão com dispositivos eletrônicos de controle altamente miniaturizados. Talvez, o primeiro robô digno deste nome tenha sido o modelo experimental SHAKEY do Instituto de Pesquisas de Stanford produzido em 1960.
Ele era capaz de empilhar blocos se valendo de uma câmera que simulava o sentido da visão.
Desde então, o desenvolvimento dos Robôs se deveu, em primeiro lugar, a uma demanda de diversos setores industriais por dispositivos que permitissem automatizar processos produtivos e, em segundo lugar, a um desenvolvimento vertiginoso da microeletrônica e da eletromecânica, áreas cujas tecnologias eram e são necessárias para a criação e produção de Robôs cada vez melhores.
Abaixo estão enunciados apenas alguns dos principais objetivos da robótica: Aumento da produtividade através da otimização da velocidade de trabalho do robô e a conseqüente redução de tempo na produção; Otimização do rendimento de outras máquinas e ferramentas alimentadas ou auxiliadas por robôs; Diminuição dos prazos de entrega de produtos; Realização de trabalhos não desejados, tediosos (alimentar máquina-ferramenta) ou perigosas e hostis (ambientes com temperaturas elevadas e presença de materiais tóxicos, inflamáveis e radioativos).
Um Robô Industrial é um dispositivo eletromecânico projetado para realizar diferentes tarefas, repetidamente, movendo peças, ferramentas e dispositivos especiais entre pontos diversos, realizando trajetórias de acordo com uma programação prévia, imitando os movimentos de um ser humano.
Esta definição envolve três tipos de Robôs: Robô Fixo Também chamado de Braço Mecânico, é montado sobre uma base a qual lhe serve de sustentação física e de referência de movimentos. É o tipo mais comum de Robô e o mais usado em aplicações industriais; Robô Móvel Também chamado de Carro ou AGV (Automatically Guided Vehicle = Veículo Guiado Automaticamente), pois pode se locomover com certa autonomia obedecendo a um controle. Robô humanóide - Também chamado de andróide por seu aspecto humano: anda sobre duas pernas (o que permite subir e descer escadas), possui dois braços (o que permite manipular objetos da mesma maneira que o ser humano) e tem dois sistemas de captação de imagem na parte frontal da cabeça (o que lhe dá visão estéreo e o mesmo ponto de vista de um ser humano). Por estas características pode substituir um ser humano sem necessidade de adaptação do ambiente.
É importante notar que num robô industrial, a potência requerida pelos atuadores exige a inclusão de um módulo de entre o controlador e o manipulador.
A automação e a robótica são duas tecnologias intimamente relacionadas. Pode-se definir a automação como uma tecnologia que utiliza sistemas mecânicos, elétricos e computacionais na operação e no controle da produção.
A robótica já foi definida como a tecnologia que utiliza sistemas mecânicos que, controlados por circuito eletrônicos mediante programação, executam tarefas que imitam movimentos humanos.
Um sistema de automação pode ter robôs trabalhando sozinhos ou junto a seres humanos, como também pode ser um processo automático, em que não existem robôs.
Fixa ou Automatização Dura: Volume de produção muito elevado com pequena variedade, onde máquinas funcionam sem a intervenção humana.
Por exemplo: Um processo mecânico com broca automatizado:
Programável: Similar a fixa, porém, o processo pode ser reprogramável para executar a mesma tarefa de outra maneira. Tem como característica o baixo volume de produção e uma grande variedade de produtos a serem fabricados. Exemplo: Um CNC que movimenta a máquina. Flexível: semelhante a programável, porque ambas constituem-se de máquinas que são automáticas e reprogramáveis. A diferença é que a automação flexível pode executar diferentes tipos de tarefas com diferentes tipos de aplicação.
Características da tarefa: Operação de máquinas operatrizes; Otimização do tempo; Necessidade de sincronismo (máquina e robô).
Características da tarefa: Dificuldade de solda (qualidade); Atividade monótona; Alta precisão (o eletrodo deve ficar perpendicular às peças); Perigo (faíscas); Barulho elevado.
Características da tarefa: Dificuldade da solda (qualidade); Atividade monótona; Alta precisão (movimento em velocidade constante ao longo do contorno da peça); Perigo (temperatura e faíscas); Barulho elevado.
Características da tarefa: Perigo (ar poluído com tinta); Precisão (qualidade e uniformidade da pintura).
Em determinadas aplicações, a trajetória percorrida pelo robô durante a atividade deve ser analisada e levada em consideração.
Nas atividades de montagem, solda ponto e abastecimento de prensas, a trajetória não influencia no resultado final. Já nas atividades de pintura e solda elétrica, a trajetória para a realização da atividade é importante, pois não podemos pintar um carro, por exemplo, em zig-zag ou soldar duas peças de forma aleatória.
Dentre os três tipos de robôs, industrial, móvel e humanóide, o foco deste trabalho são os robôs industriais. Aqui vamos estudar sua construção, programação e integração em sistemas de produção automática.
No âmbito dos equipamentos industriais, os robôs industriais se inserem na classificação das máquinas automáticas programáveis. Por isso devemos organizar nosso estudo partindo das partes que o compõem.
As garras são efetuadores destinados a pegar e segurar objetos para seu deslocamento dentro do espaço de trabalho do manipulador.
Podem ser pequenos e frágeis, como é o caso de componentes eletrônicos que são montados numa placa pelo robô, ou pesados e robustos, como carros que são colocados de uma parte para outra de uma linha de produção. O acionamento pode ser elétrico, pneumático ou hidráulico (para grandes esforços).
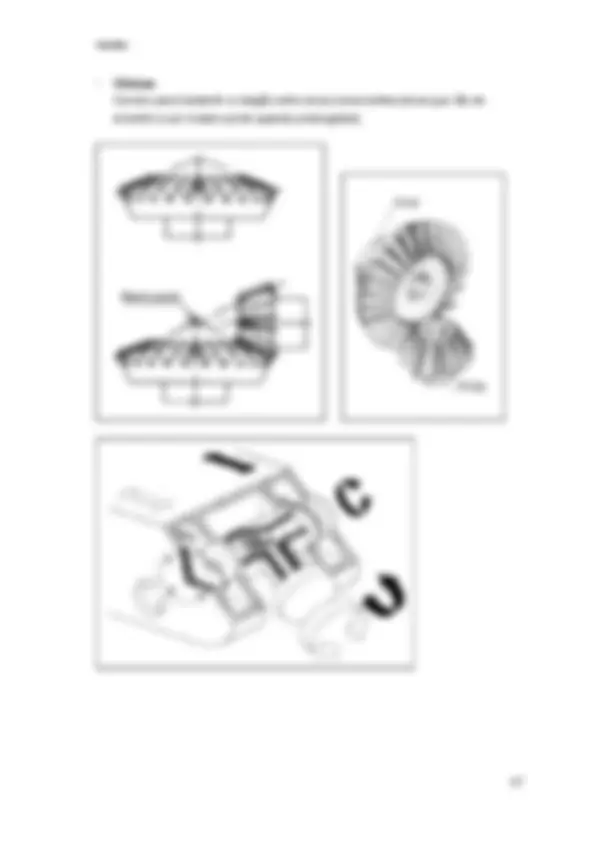
É similar a garra de dois membros, mas permite maior segurança ao manipular os objetos, que podem ser esféricos ou triangulares.
A figura abaixo apresenta uma garra de três membros, cujos dedos são retráteis, constituídos por várias conexões.
Possui dois dedos com depressões circulares capazes de agarrar objetos cilíndricos de diversos tamanhos.
Uma desvantagem evidente desta garra é a sua limitação de abertura, que impossibilita a manipulação de objetos maiores que a sua abertura total.
A figura a seguir ilustra uma garra para objetos cilíndricos de até 3 diâmetros diferentes.
Para manipularmos um objeto frágil, sem danificá-lo, os dedos da garra devem exercer um grau de força controlado que não se concentrasse em apenas um ponto do objeto.
Muitas garras têm sido projetadas com esta finalidade, das quais uma é ilustrada a seguir, na qual temos dois dedos flexíveis que se curvam para dentro quando inflados pelo ar, que é aplicado de forma controlada, cuja expressão determina a força com que o objeto é agarrado.
São similares em seu formato às garras a vácuo e são um meio razoável para manipular materiais ferromagnéticos. Assim como, no caso das garras a vácuo, as peças a serem transportadas pelas garras magnéticas devem apresentar pelo menos uma superfície limpa.
Algumas vantagens no uso de garras magnéticas são:
A grande desvantagem está no fato de somente manusear peças de material ferromagnético.
Em muitas aplicações, o robô é utilizado para manipular uma ferramenta, ao invés de uma peça.
O robô deve movimentar a ferramenta sobre o objeto a ser trabalhado.
O uso de uma garra permite que as ferramentas sejam trocadas durante o ciclo de trabalho, facilitando o manuseio de várias ferramentas.
Na maioria das aplicações de robôs nas quais uma ferramenta é manipulada, a ferramenta é presa diretamente no punho do robô, sendo nesses casos, a ferramenta o órgão terminal.
Alguns exemplos de ferramentas usadas como efetuadores em aplicações robóticas: Maçaricos para soldagem a arco; Bicos para pintura por pulverização; Mandris para operações como: furação, ranhuramento, polimento, retifica e etc; Aplicadores de cimento ou adesivo líquido para montagem; Ferramentas de corte por jato e laser; Ferramentas para soldagem a ponto.
Em todos os casos o robô controla a atuação das ferramentas.
É um adaptador que permite a troca rápida de garras de mesma conexão (pneumáticas, hidráulicas, etc.).
Como desvantagens, esse tipo de alternador possui o acréscimo de peso ao braço do robô, custo elevado e desperdício de tempo na troca de garras.
A base é o elemento de fixação do braço mecânico em uma superfície (solo, parede, teto) ou à Estação de Trabalho em um determinado setor da fábrica. Ela sustenta todo o braço mecânico e serve como ponto de apoio e de referência para todos os seus movimentos. Possibilita o movimento de rotação do Braço Mecânico.