


CAPÍTULO 1
Blocos funcionais do microcomputador
¾ Introdução
¾ O microcomputador
¾ Blocos Funcionais

























































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Apostila básica para aprender a trabalhar com microcontrolador PIC
Tipologia: Notas de estudo
1 / 145

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Os avanços tecnológicos conseguidos na fabricação de semicondutores permitiram o surgimento dos microprocessadores. Com isso, foi possível que os computadores se tornassem cada vez mais compactos e seus custos mais acessíveis, permitindo uma ampliação nas possibilidades de suas utilizações.
Onde não se imaginava utilizar sistemas computadorizados há poucos anos atrás, hoje já se faz um amplo uso do computador. Como a indústria tem como principal objetivo, um aumento na qualidade de seus produtos e aumentar a quantidade de produtos fabricados no mesmo tempo, é indispensável que os profissionais do ramo eletrônico tenham um bom conhecimento sobre seu funcionamento.
É um equipamento cuja função é executar automaticamente uma seqüência de operações para as quais foi anteriormente programado. Os microcomputadores são equipamentos capazes de executarem diferentes tarefas para atender às várias necessidades do usuário, os quais podem ter finalidades gerais.
Quando utilizamos em aplicações gerais como os microcomputadores comercializados, definimos como sendo os de finalidades gerais. Para poderem atender uma aplicação determinada, são projetados os de finalidades específicas.
Os dados nos computadores são armazenados e expressos em linguagem binária que utiliza os dígitos 0 e 1. Essas condições são obtidas por meio de flip-flop, que são dispositivos de armazenamento nos sistemas de computadores. O bit pode ser definido como uma unidade básica de representação de dados em qualquer sistema de computador. Os computadores processam dados com extensão de 8 bits ou um de seus múltiplos, 16, 32, 64.
Determinados números de bits são denominados de palavra “Word”, o qual pode conter, 1, 2, 4, 8, 16, 32 e 64 bits. A palavra de 4 bits é chamada de “nibble” e a palavra de 8 bits de “byte”. Uma palavra pode representar um dado ou uma diretriz chamada de instrução. O que torna imprescindível citarmos as definições de:
Hardware: Consiste de circuitos eletrônicos responsáveis pela execução direta de instruções em linguagem de máquina: C. Is, placas de circuitos impressos, cabos, fontes de alimentação etc.
Software: O grupo ou conjunto de instruções apresentadas ao computador chama-se programa, o qual consiste de algoritmos, que é o processo pelo qual as operações lógicas são executadas pela máquina.
Firmware: Consiste de um software embutido em circuitos eletrônicos.
É comum dizer que qualquer operação feita por software pode também ser construída por hardware e qualquer instrução executada pelo hardware pode também ser simulada por software.
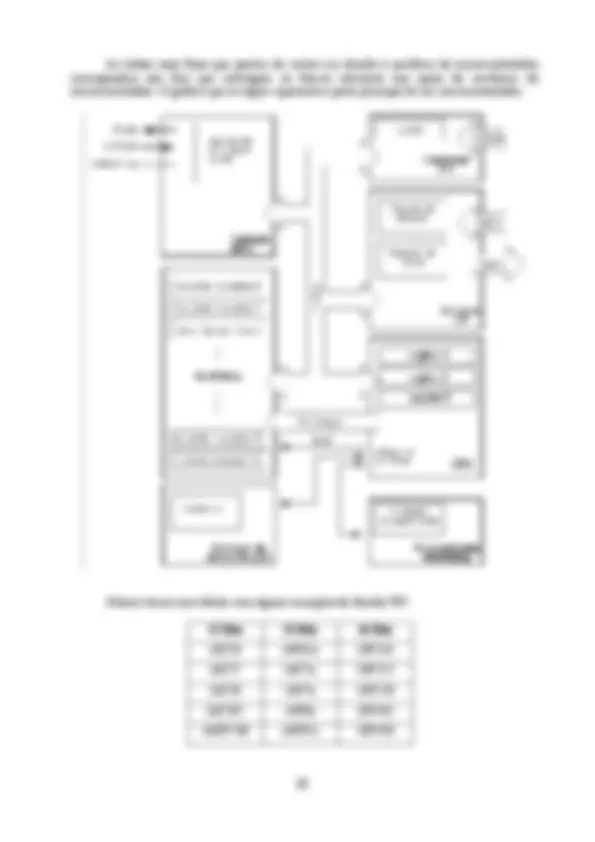
Um microprocessador pode ser divido segundo seus blocos funcionais:
A Unidade Lógica Aritmética (ULA) é responsável pelas operações lógicas e aritméticas entre os bits, gerando uma outra palavra como saída. Estas operações são executadas entre o acumulador e o registrador temporário do microprocessador com os quais a ULA se comunica internamente e o resultado é armazenado no próprio acumulador.
A unidade de controle e sincronização coordena e controla todas os blocos funcionais do computador em uma seqüência lógica e sincronizada. Ela recebe as instruções vindas do programa armazenado na memória de programa já decodificado pelo decodificador de instruções e emite os sinais de sincronização e controle para as diversas partes do computador.
Unidade de Memória A unidade de memória é à parte do sistema na qual são armazenados os dados e os programas que podem ser executados pelo computador.
A unidade de memória possui dois tipos de memória:
Para que seja possível localizar uma entre muitos dados armazenados na memória é necessário que as posições destes dados sejam numeradas. Essas posições são chamadas de endereços. No próximo capitulo vamos estudar os diversos tipos e principais características das memórias.
Unidade de I/O As unidades de I/O são as interfaces pelos quais o usuário comunica-se com o computador e vice-versa. As unidades de I/O possuem conexão com dispositivos chamados unidades periféricas, tais como: teclados, terminais de vídeo, impressoras, etc.
Interface A interface é um dispositivo que auxilia na transferência de informações entre a Unidade Central de Processamento e dispositivos periféricos. Ela é usada principalmente em sistemas que possuem somente uma CPU e vários dispositivos periféricos.
DMA “DMA” ou Direct Memory Acess (Acesso Direto à Memória) é o processo de comunicação direta entre dispositivos periféricos e memória.
Este processo se deve ao fato da necessidade de se aumentar à velocidade de transferência de dados.
Memória é à parte do sistema onde são armazenados os programas e dados necessários à realização das operações efetuadas pelo computador. A memória é equivalente a milhares de registradores, cada um armazenando uma palavra binária. Os microcomputadores de 8 bits utilizam memórias de semicondutores com até 65536 posições, cada uma capaz de armazenar um byte de informação. Além das memórias de semicondutores, outros dispositivos mais comuns também podem ser citados: Cartão de papel perfurado, fita magnética, disco magnético, tambor magnético, núcleo magnético, memória de bolha. Memórias que possuem a característica de podermos acessar qualquer registrador da memória de modo aleatório sem antes percorrermos toda a estrutura da memória através de endereço dos registradores desejados, são conhecidas como memórias de acesso randômico. Diferente das memórias de acesso seqüenciais onde é muito mais rápido acessarmos a memória seqüencialmente já que para acessarmos dados em diferentes posições da memória há a necessidade de se percorrer a estrutura ate chegarmos no ponto desejado, implicando num tempo maior de leitura. Dentre os vários tipos de memória, as mais comuns são as memórias RAM e as memórias ROM.
RAM: “Random Access Memory” – Memória de Acesso Randômico – também conhecida como memória de leitura e gravação, a qual é um tipo de memória que se pode ler e escrever dados binários. A RAM é utilizada para armazenar programas temporários e dados que serão alterados no decorrer da execução do programa. Os dados na memória RAM são retidos apenas enquanto a fonte permanece ligada, a RAM é uma memória volátil.
Figura 2 – Ilustração de memória RAM As RAMs podem ser do tipo dinâmicas ou estáticas.
RAM dinâmica: (DRAM “Dynamic Random Access Memory”). É a memória que perde a informação armazenada mesmo quando a alimentação é constante. Isso acontece porque cada célula da DRAM apresenta um transistor MOSFET e um capacitor que armazena um dado (1 – bit). O transistor fica em série com o capacitor de armazenamento e cumpre a função de uma chave que permite a entrada ou saída da carga do capacitor quando o pino WE é ativado.
Devido às fugas de carga do capacitor, há necessidade de reposição dessas cargas através de um pulso de “REFRESH”, vindo do microprocessador. Esse processo requer que todas as células de armazenamento sejam endereçadas pelo menos uma vez a cada 2 milissegundos. Um circuito contador externo a memória é geralmente incorporado ao sistema para ativar o barramento de endereço, quando o microprocessador não está acessando a memória.
Saída / Entrada de dados
Endereço An . A
Controle
Os transistores T3 e T4 funcionam como chaves lógicas que levam a saída a nível 1 e 0 respectivamente. Todavia, quando a entrada desabilitadora está em nível 0 coloca os dois transistores em corte por meio do diodo D. Este drena o potencial de T2 para massa. Assim, a saída fica em alta impedância em relação à fonte (nível 1) e ao terra (nível 0). O símbolo do dispositivo de três estados é apresentado abaixo.
Figura 4 – Símbolo Dispositivos de três estados podem ser acrescentados às linhas de dados de uma memória para que vários chips do sistema possam usar o mesmo barramento de comunicação. Essas chaves de três estados já incorporadas ao C. I. permitem conectar ou desconectar as linhas de saída do barramento de dados.
Tempo de acesso da RAM é o tempo necessário para que o dado registrado em uma posição endereçada seja transferido para os terminais de saída (tempo de acesso à leitura); ou o tempo necessário para que o dado colocado nos terminais de entrada seja gravado na posição endereçada (tempo de acesso à escrita). O tempo de acesso depende do chip utilizado e é fornecido pelo manual do fabricante. A tabela abaixo mostra os tempos relacionados à tecnologia de fabricação do chip.
Tecnologia Tempo de acesso (em ns) TTL 60 a 200 ECL 10 a 40 PMOS estática 500 a 1000 NMOS estática 300 a 600 CMOS estática 400 a 700 PMOS dinâmica 400 a 700 NMOS dinâmica 200 a 550
Entre as milhares memórias do tipo RAMs comercializadas atualmente, a 6116 de tecnologia de fabricação MOS, será apresentada como exemplo. Essa memória é equivalente a
- Capacidade: 2K x 8 bits - Alimentação: simples de 5v - Tempo de acesso de chip enable (CE): 400 ns (Máximo) - Nível de tensão: compatível com nível TTL - Saída / entrada de dados comum - Não requer clocks ou “strobe” Entrada Saída
Descrição da pinagem
Figura 5 – Pinagem da memória RAM 6116 ou 2128
A correspondência entre pinos e sinais de entrada / saída é comentada na tabela a seguir.
Pino Sinal Função
1 A7 Bit 7 de endereço 2 A6 Bit 6 de endereço 3 A5 Bit 5 de endereço 4 A4 Bit 4 de endereço 5 A3 Bit 3 de endereço 6 A2 Bit 2 de endereço 7 A1 Bit 1 de endereço 8 A0 Bit 0 de endereço 9 D0 Bit 0 de dado 10 D1 Bit 1 de dado 11 D2 Bit 2 de dado 12 Vss Alimentação – GND = referencia 0 volt 13 D3 Bit 3 de dado 14 D4 Bit 4 de dado 15 D5 Bit 5 de dado 16 D6 Bit 6 de dado 17 D7 Bit 7 de dado 18 CE Habilita o chip quando em nível zero. 19 A10 Bit 10 de endereço 20 OE Habilita barramento de dado quando em nível zero (tri-state).
A PROM (“Programmable Read Only Memory”) permite que o próprio usuário armazene os dados / programas desejados. Isso é feito com o auxílio de um programador PROM. A memória possui uma malha de linhas cruzadas em forma de grade semelhante à da ROM. Em cada interseção da grade está localizado um dispositivo (Diodo, transistor bipolar ou MOS) e em serie com cada dispositivo existe um elemento de interrupção (fusível ou diodo). Os elos fusíveis são queimados por meio da saturação de um transistor localizado na interseção linha / coluna cujo endereço foi selecionado pelo circuito de decodificação. Nas PROMs que utilizam diodos, os cruzamentos linha / coluna da grade são unidos por dois diodos ligados em serie oposta. Abaixo temos uma figura que mostra a estrutura e o esquema elétrico de uma PROM que se utiliza diodos.
Figura 7 – Estrutura de uma memória PROM por diodos
A EPROM (“Erasable Programmable Read Only Memory”), isto é, uma memória programável e apagável apenas de leitura. É uma ROM que pode ser apagada e reprogramada um número indeterminado de vezes. As informações são apagadas pela exposição do chip à luz ultravioleta (UV) de alta intensidade, a qual penetra por uma abertura de cristal (quartzo) existente no centro do circuito integrado. A EPROM não pode ser apagada seletivamente, isto é, não pode ter apenas parte de seus bits apagados. Quando exposta a UV, todos os bits são apagados. A EEPROM ou EAROM (“Eletrically Erasable Programmable Read Only Memory”) ou (“Eletrically Alterable Programmable Read Only Memory”), não necessitam de UV para serem apagadas e sim de impulsos elétricos. Uma outra vantagem é o fato de não ser necessário retirar esta memória do circuito para ser reprogramada. Apesar de serem memórias que apresentam características não voláteis, as informações que se encontram armazenadas tendem a se deteriorar com o tempo, o que não ocorre com as outras memórias da família ROM. Tem como grande desvantagem um custo elevado e que podem ser apagada somente 10 mil vezes.
A FLASH MEMORY são memórias com características similares a EEPROM e EPROM, em um produto que oferece as vantagens destas memórias sem o alto custo, onde temos:
A célula de memória Flash é semelhante à célula de uma EPROM, e é constituída por um único transistor. Na memória Flash, uma fina camada de oxido de silício forma a porta do transistor, permitindo apagar eletricamente a memória e uma maior densidade que as EEPROMs, com um custo menor.
As memórias bipolares são mais rápidas que as memórias MOSFETs. Entre as milhares memórias ROMs comercializadas atualmente, a 2732-A de tecnologia de fabricação EPROM- MOS, será apresentada como exemplo. Possui as seguintes características.
Descrição da pinagem
Figura 7 – Pinagem da memória ROM 27C32. A correspondência entre pinos e sinais de entrada / saída é comentada na tabela a seguir. Pino Sinal Função 1 A7 Bit 7 de endereço 2 A6 Bit 6 de endereço 3 A5 Bit 5 de endereço 4 A4 Bit 4 de endereço 5 A3 Bit 3 de endereço 6 A2 Bit 2 de endereço 7 A1 Bit 1 de endereço 8 A0 Bit 0 de endereço 9 D0 Bit 0 de dado 10 D1 Bit 1 de dado 11 D2 Bit 2 de dado
Antes de iniciarmos, é relevante citarmos a história dos microprocessadores, onde abaixo temos um breve resumo com destaques para algumas datas consideradas importantes. Na década de 40 o surgimento da válvula e o transistor (1948), na década de 50 a comercialização do transistor, na década de 60 os circuitos integrados do tipo SSI (“Small Scale Integrated” ou pequena escala de integração), na década de 70 os circuitos integrados do tipo MSI (“Medium Scale Integrated” ou media escala de integração). Em 1971 surgem os circuitos integrados do tipo LSI (“Large Scale de Integrated” ou com grande escala de integração), com o primeiro microprocessador de 4 bits o INTEL 4004, em 1972 a INTEL lança o 8008 uma CPU de 8 bits. Já em 1974 a INTEL começa a ter concorrentes, com o microprocessador 8080, dez vezes mais rápido que o anterior, a MOTOROLA lança o 6800 que durante muito tempo esteve presente nos primeiros microcomputadores. A partir daí tivemos em 1976 a TEXAS com o primeiro CPU de 16 bits, em 1977 a MOSTEK com o 6502 (Apple I, II e II plus) e a ZILOG com o Z80 (TRS80), um dos mais utilizados até hoje, em 1978 os circuitos integrados VLSI permitiram o surgimento de novos microprocessadores como o MOTOROLA 6809 a INTEL com o 8088 / 8086 e os microprocessadores BIT-SLICE (de 2 a 64 bits).
Década de 80:
1980 – MOTOROLA 68.000 em 1981 – MOTOROLA 68.
1982 – INTEL 80186 / 80188 e o 80286 (com 130.000 transistores integrados)
1984 – MOTOROLA 68.
1985 – INTEL 80386 ( 80386DX, ou i386)
1986 – MOTOROLA 68.
1988 – INTEL 80386SX e em 1989 o i486 (1.200.000 transistores)
Década de 90:
1991 – INTEL i386SL, i486SX (os primeiros com tecnologia RISC)
1992 – INTEL i486 DX2/50 e o i486 DX2/
1993 – INTEL Pentium
1995 – INTEL Pentium Pro
1997 – INTEL Pentium II
1998 – INTEL Pentium II 300, 266 MHz
1999 – INTEL Pentium III 600, 700 MHz
2000 – INTEL Pentium III 1000 MHz
2001 / 2002 – INTEL Pentium IV de até 2,7 GHz (Aproximadamente)
2003 / 2004 – INTEL Pentium IV de ate 3,6 GHz e o Athlon 64 da AMD
O microprocessador ou Unidade Central de Processamento (CPU) é um dispositivo digital baseado numa única pastilha (CHIP). Esta pastilha, por si só, tem a capacidade de controlar e manipular dispositivos externos como: memórias, portas de I/O (entrada/saída) e outros circuitos.