Baixe Cap2 - Cinemática direta e inversa e outras Notas de estudo em PDF para Cultura, somente na Docsity!
2. CINEMÁTICA
2.1. Representação de Posição e Orientação:
Sistemas Referenciais :
- Para localizar um corpo rígido no espaço tridimensional, um sistema referencial é associado ao mesmo.
- Um referencial associado a um corpo rígido é fixo no mesmo.
- Qualquer ponto do corpo rígido possuirá coordenadas invariantes no seu referencial associado.
- referencial será identificado por uma letra entre chaves. Exemplo: {A}, {i}, etc.
- Os referenciais são definidos por três vetores unitários ortogonais: xˆ ,yˆ,zˆ.
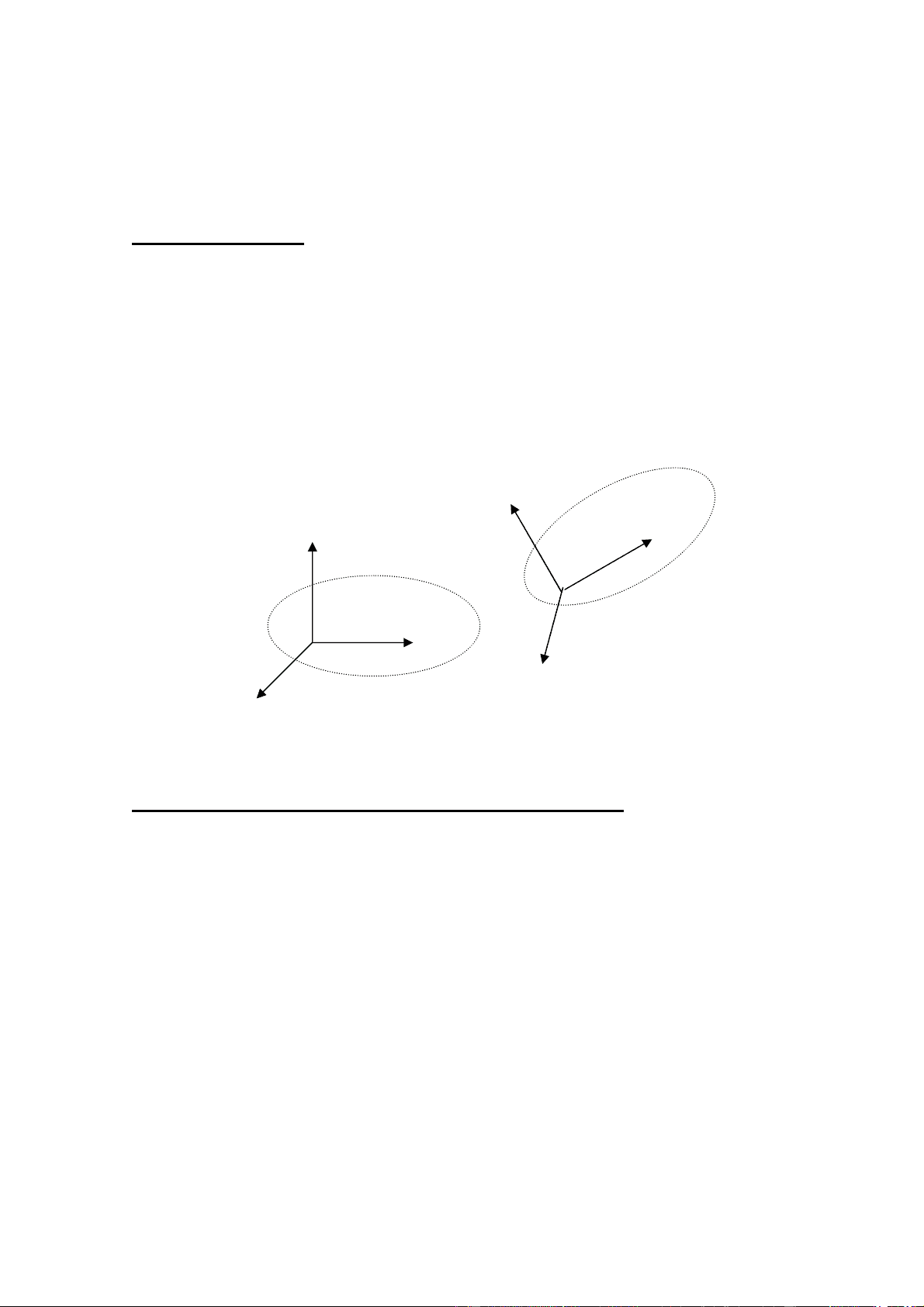
Figura 2.1. Representação da localização de corpos rígidos por meio de referenciais.
Localização de um Corpo Rígido em relação a um Referencial :
- A localização de um corpo rígido B em relação a um referencial qualquer {A} é definida pela localização do seu referencial associado {B} em relação a {A}.
- A localização de {B} em relação a {A} é completamente definida especificando:
- a posição de {B} em relação a {A}
- a orientação dos eixos de {B} em relação a os eixos de {A}.
Representação de posição de {B} em relação a {A} :
A posição de {B} em relação a {A} é definida pelo vetor de posição APB ligando a origem de {A} à origem de {B}, expresso em coordenadas de {A}:
AP B = [ Ap Bx Ap By Ap Bz] T
yA
XA
zA
{A}
yB
xB
zB
{B}
Figura 2.2. Posição de um referencial {B} em relação a um referencial {A}.
Exemplo : considere dois referenciais {A} e {B} com a mesma orientação, com a origem de {B} localizada a 5 unidades ao longo do eixo xA. Considere um ponto P, expresso em {B} como BP = [2 2 1]T. Determine a posição de {B} em relação a {A} bem como a representação do ponto P em {A}.
Figura 2.3. Posição em um referencial {B} transladado ao longo do eixo xA de {A}.
Solução: A origem de {B} está localizada no ponto (5, 0, 0) em coordenadas de {A}, portanto, a posição de {B} em relação a {A} é dada por:
AP B = [5^0 0] T
Como os dois referenciais possuem a mesma orientação:
AP = AP B +^
BP = [5 0 0]T + [2 2 1]T = [7 2 1]T
Representação de orientação de {B} em relação a {A} :
A orientação de {B} em relação a {A} é definida pela matriz de rotação ARB de dimensão 3x3, ortogonal, cujos vetores colunas são os eixos unitários de {B} expressos em coordenadas de {A}:
AR B = [
Ax B
Ay B
Az B]
yA
xA
zA
{A}
yB xB
zB
{B}
AP
B
yA
xA
zA
{A}
yB
zB
{B} xB
P
APB
Note que cada elemento da matriz é representado pelo produto interno entre um eixo unitário de {A} e um eixo unitário de {B}, sendo portanto igual ao cosseno do ângulo entre eles. Por esta razão, a matriz de rotação ARB é também chamada de Matriz de Cossenos Diretores. Os valores dos cossenos diretores são independentes da escolha do referencial {C}.
Exemplo : considere dois referenciais coincidentes, {A} e {B}. Suponha que {B} gira um ângulo θ em torno do eixo AzB. Encontre a matriz de rotação ARB = R(z,θ):
Figura 2.5. Rotação em torno do eixo zA.
Da figura acima, através de simples relações trigonométricas, temos:
Ax B = [cos(θ)^ sen(θ) 0] T Ay B = [-sen(θ) cos(θ) 0] T Az B = [0^0 1] T
cos(θ) -sen(θ) 0 ⇒ ARB = R(z,θ) = sen(θ) cos(θ) 0 0 0 1
De forma análoga, para rotações em torno dos eixos xA e yA, temos respectivamente:
1 0 0 ⇒ ARB = R(x,θ) = 0 cos(θ) -sen(θ) (^0) sen(θ) cos(θ)
cos(θ) 0 sen(θ) ⇒ ARB = R(y,θ) = 0 1 0 -sen(θ) 0 cos(θ)
Exemplo : considere dois referenciais coincidentes, {A} e {B}. Suponha que {B} gira um ângulo θ em torno do eixo AzB. Considere um ponto P expresso em coordenadas de {B}, BP. Encontre a representação do ponto P em coordenadas de {A}, AP:
xA
yA
xB
yB
θ
zA, zB
θ
Figura 2.6. Rotação de um ponto em torno do eixo zA.
Da figura acima, através de relações trigonométricas simples, temos:
Bp x =^ Ap x.cos(θ) +^ Ap y.sen(θ)^ Bp y =^ Ap y.cos(θ) -^ Ap x.sen(θ)^ Bp z =^ Ap z
Resolvendo para Apx, Apy, Apz:
Ap x =^ Bp x.cos(θ) -^ Bp y.sen(θ)^ Ap y =^ Bp x.sen(θ) +^ Bp y.cos(θ)^ Ap z =^ Bp z
Que em notação matricial, como era de esperar, corresponde a:
Ap x cos(θ)^ -sen(θ)^0
Bp x Ap y =^ sen(θ) cos(θ) 0.^ Bp y ⇒ AP = R(z,θ).BP Ap z 0 0 1 Bp z
Outras representações de orientação :
A matriz de orientação ARB representa a orientação de {B} em relação a {A} de modo redundante, visto que seus nove elementos possuem seis relações de dependência (as colunas de ARB são vetores unitários e perpendiculares entre si). Assim, de forma análoga à especificação de posição, três parâmetros independentes são suficientes para especificar orientação no espaço tridimensional. Existem vários esquemas e convenções utilizados para fazer esta especificação. A seguir, apresentaremos alguns deles.
Ângulos de Euler ZXZ :
Neste esquema, a orientação de {B} em relação a {A}é representada por três ângulos de rotação (φ, θ, ψ), exercutados nessa ordem, respectivamente, em torno dos eixos z, x e z de um referencial móvel, inicialmente coincidente com {A} e alinhado com {B} após as três rotações. A matriz de rotação equivalente a (φ, θ, ψ) é dada por:
Rφθψ = R(z,φ).R(x,θ).R(z,ψ)
Definimos a seguinte nomenclatura: sen(θ) = sθ , cos(θ) = cθ. Assim:
xA
yA
xB
yB
θ zA, zB
θ
Ap x
Ap y Bp x
Bp y
Figura 2.8. Ângulos de Euler ZYZ.
cφ -sφ 0 cθ 0 sθ cψ -sψ 0 Rφθψ = sφ cφ 0.^0 1 0.^ sψ cψ 0 (^0 0 1) -sθ 0 cθ 0 0 1
(cφ.cθ.cψ - sφ.sψ) (-cφ.cθ.sψ - sφ.cψ) (cφ.sθ) ⇒ Rφθψ = (sφ.cθ.cψ + cφ.sψ) (-sφ.cθ.sψ + cφ.cψ) (sφ.sθ) (-sθ.cψ) (sθ.sψ) (cθ)
Usando a mesma metodologia do caso anterior, é possível obter a relação inversa, que expressa os ângulos de Euler ZYZ em função de uma matriz de rotação equivalente:
θ = atan2(±[R 312 +R 322 ]1/2^ , R 33 ) φ = atan2(R 23 /sen(θ),R 13 /sen(θ)) ψ= atan2(R 32 /sen(θ),-R 31 /sen(θ))
Novamente, dois conjuntos de ângulos de Euler satisfazem a solução. Tomando o sinal positivo da raiz quadrada, o que equivale a limitar θ ao intervalo 0 ≤ θ ≤ π, eliminamos esta ambigüidade. Da mesma forma do que no caso anterior, verifica-se também que, para θ = 0 ou θ = π, a solução degenera (ocorre uma divisão por zero), o que resulta em infinitas soluções, as quais são devidas à ocorrência de duas rotações em torno do mesmo eixo. Assim:
Para θ = 0 ⇒ ψ + φ = atan2(R 21 ,R 11 ) Para θ = π ⇒ ψ - φ = atan2(R 21 ,-R 11 )
Ângulos de Euler ZYX :
De forma análoga aos casos anteriores, neste esquema, a orientação de {B} em relação a {A}é representada por três ângulos de rotação (φ, θ, ψ), executados nessa ordem, respectivamente, em torno dos eixos z, y e x de um referencial móvel, inicialmente coincidente com {A} e alinhado com {B} após as três rotações. A matriz de rotação equivalente a (φ, θ, ψ) é dada por:
Rφθψ = R(z,φ).R(x,θ).R(z,ψ)
cφ -sφ 0 cθ 0 sθ 1 0 0 Rφθψ = sφ cφ 0.^0 1 0.^0 cψ -sψ (^0 0 1) -sθ 0 cθ 0 sψ cψ
yA
zA,z’
xA
φ
φ
φ x'
y'
θ
z'
x'
y',y”
x” θ
z"
θ
x” (^) ψ xB
y”
ψ
z",zB
ψ
yB
(cφ.cθ) (cφ.sθ.sψ - sφ.cψ) (cφ.sθ.cψ + sφ.sψ) ⇒ Rφθψ = (sφ.cθ) (sφ.sθ.sψ + cφ.cψ) (sφ.sθ.cψ - cφ.sψ) (-sθ) (cθ.sψ) (cθ.cψ)
Figura 2.9. Ângulos de Euler ZYX.
Usando a mesma metodologia dos casos anteriores, é possível obter a relação inversa, que expressa os ângulos de Euler ZYX em função de uma matriz de rotação equivalente:
θ = atan2(-R 31 ,±[R 322 +R 332 ]1/2) φ = atan2(R 21 /cos(θ),R 11 /cos(θ)) ψ = atan2(R 32 /cos(θ),R 33 /cos(θ))
Novamente, dois conjuntos de ângulos de Euler satisfazem a solução. Tomando o sinal positivo da raiz quadrada, o que equivale a limitar θ ao intervalo -π/2 ≤ θ ≤ π/2, eliminamos esta ambigüidade. Da forma semelhante aos casos anteriores, verifica-se também que, para θ = -π/2 ou θ = π/2, a solução degenera (ocorre uma divisão 0/0), o que resulta em infinitas soluções, as quais são devidas à ocorrência de duas rotações em torno do mesmo eixo. Assim:
Para θ = -π/2 ⇒ ψ + φ = atan2(-R 12 ,R 22 ) Para θ = π/2 ⇒ (ψ - φ) = atan2(R 12 ,R 22 )
Os ângulos de Euler ZYX são também chamados de ângulos de Rolamento, Lançamento e Guinada ( Roll , Pitch , Yaw ), termos derivados dos movimentos de rotação de naves ou aeronaves em torno dos seus eixos principais.
Figura 2.10. Ângulos de Rolamento, Lançamento e Guinada: φ, θ, ψ.
yA
zA,z’
xA
φ
φ
φ x'
y'
θ
z'
x'
y',y”
x” θ
z”
θ
ψ
zB (^) y B ψ y”
x”,xB
z”
ψ
φ z
θ y
x ψ
Definindo vθ = vers(θ) = 1 – cos(θ) e substituindo os termos dependentes de α e β por:
sα = ky/[ky^2 + kz^2 ]1/2^ cα = kz/[ky^2 + kz^2 ]1/2^ sβ = kx cβ = [ky^2 + kz^2 ]1/
(kx^2 .vθ+cθ) (kx.ky.vθ-kz.sθ) (kx.kz.vθ+ky.sθ) ⇒ Rkθ = (kx.ky.vθ+kz.sθ) (ky^2 .vθ+cθ) (ky.kz.vθ-kx.sθ) (kx.kz.vθ-ky.sθ) (ky.kz.vθ+kx.sθ) (kz^2 .vθ+cθ)
A partir de relações entre elementos da matriz acima, é possível obter a representação ângulo-eixo equivalente à representação Rkθ:
θ = cos-1((R 11 +R 22 +R 33 -1)/2)
kx = (R 32 -R 23 )/(2.sθ) ky = (R 13 -R 31 )/(2.sθ) kz = (R 21 -R 12 )/(2.sθ)
A solução acima é valida 0 ≤ θ ≤ π. Para uma dada matriz Rkθ, existem duas soluções possíveis: (k, θ) e (-k, -θ). Verifica-se também que, para θ = 0 ou θ = π, a solução degenera (ocorre uma divisão por zero), o que resulta em infinitas soluções, (o eixo k torna-se indefinido). Assim, para pequenos ângulos, a solução é mal condicionada.
Exemplo : dados os referenciais {A} e {B} mostrados na figura abaixo, obtenha a matriz de rotação ARB bem como a sua representação em ângulos de Euler ZXZ, ZYZ, ZYX e a representação equivalente ângulo/eixo.
Figura 2.12. Exemplo de orientação relativa entre dois referenciais.
Expressando os eixos de {B} em {A}, obtemos a sua orientação relativa:
0 1 0 AR B =^0 0 1 0 0
Os ângulos de Euler ZXZ são dados por:
φ = atan2(R 13 ,-R 23 ) = atan2(0,-1) = π θ = atan2([R 312 +R 322 ]1/2^ , R 33 ) = atan2(1,0) = π/ ψ = atan2(R 31 ,R 32 ) = π/
xA, yB
yA, zB
zA, xB
Os ângulos de Euler ZYZ são dados por:
φ = atan2(R 23 ,R 13 ) = atan2(1,0) = π/ θ = atan2([R 312 +R 322 ]1/2^ , R 33 ) = atan2(1,0) = π/ ψ = atan2(R 32 ,-R 31 ) = atan2(0,-1) = π
Para o caso dos ângulos de Euler ZYX ( roll , pitch , yaw ), temos que φ é indefinido, pois φ = atan2(R 21 ,R 11 ) = atan2(0,0). Neste caso, teremos infinitas soluções:
θ = atan2(-R 31 ,[R 322 +R 332 ]1/2) atan2(-1,0)= -π/ ψ + φ = atan2(-R 12 ,R 22 ) = atan2(-1,0) = -π/
Para obter uma solução é necessário arbitrar um dos ângulos. Impondo o ângulo φ = 0, temos que ψ = -π/2.
A representação equivalente Ângulo/Eixo é dada por:
θ = cos-1((R 11 +R 22 +R 33 -1)/2) = cos-1(-1/2) = 2π/
kx = (R 32 -R 23 )/(2.sθ) = -(1/3)1/ ky = (R 13 -R 31 )/(2.sθ) = -(1/3)1/ kz = (R 21 -R 12 )/(2.sθ) = -(1/3)1/
2.2. Transformações Homogêneas:
Mapeamentos :
Dados dois referenciais {A} e {B} e um ponto P, conhecendo as coordenadas BP do mesmo no referencial {B}, as coordenadas AP do mesmo no referencial {A} podem ser obtidas, desde que se conheça a posição APB e orientação ARB de {B} em relação a {A}, através de um mapeamento de BP para AP. A seguir, define-se {U} como um referencial universal.
Mapeamento de Translação :
Um mapeamento de translação caracteriza-se por mapear um ponto de um referencial {B} para um referencial {A}, onde {A} e {B} possuem origens diferentes mas orientações coincidentes (UPA ≠ UPB, URA = URB). Como {A} e {B} possuem a mesma orientação, as coordenadas de P em {A} podem ser expressas diretamente através de uma soma vetorial:
AP = BP + AP B
Mapeamento Geral :
Quando os sistemas de referência {A} e {B} diferem tanto em posição como em orientação (UPA ≠ UPB, URA ≠ URB), a representação de um ponto P em {A} pode ser obtida a partir da sua representação em {B} através do seguinte procedimento:
- Por meio de um mapeamento de rotação, obter a representação IP de P em relação a um referencial intermediário {I}, tal que este possua a mesma origem que {B}, mas esteja alinhado com o referencial {A}, (UPI = UPB e URI = URA).
IP = IR B.
BP = AR
B.
BP
- Representar IP em {A} através de um mapeamento de translação:
AP = IP + IP B =^
IP + AP
B
Assim: AP = ARB.BP + APB
Figura 2.15. Mapeamento de Geral.
Transformação Homogênea:
O mapeamento geral pode ser representado matricialmente da seguinte maneira:
AP = AR B
AP
B.^
BP
onde: ARB APB = ATB 0 0 0 1
AT B é a Matriz de Transformação Homogênea^ que representa de modo compacto a posição e orientação de {B} em relação a {A}. A linha inferior da equação matricial foi acrescentada de modo a resultar numa matriz ATB quadrada 4x4 para a qual exista matriz inversa. Os vetores de posição 4x1 (último elemento igual a 1) são vetores de coordenadas homogêneas. Doravante, para fins de simplificação, usaremos a nomenclatura AP tanto para vetores de posição 3x1, como para vetores em coordenadas homogêneas, sempre que o contexto torne obvio as suas dimensões.
{I}
{B}
P
{A}
APB
AP
Operadores de Movimento :
O movimento de um referencial em relação a outro pode ser descrito usando transformações homogêneas apropriadas que definam as mudanças de posição e orientação relativas ao se passar de um referencial para outro.
Operadores de Translação :
Dado um vetor APB, o Operador de Translação T(APB/APB,APB) aplicado sobre um vetor BP o translada uma distância APB ao longo da direção do vetor unitário AP B/
AP
B, resultando no vetor transladado^ AP (em coordenadas homogêneas):
AP = T(AP B/
AP
B,
AP
B).
BP
onde, sendo I a matriz identidade 3x3:
Outra maneira de abordar este problema é considerar o ponto BP fixo em relação ao referencial {B}, inicialmente coincidente com o referencial {A}. A seguir, deslocar a origem de {B} até a posição APB relativa a {A} através de um movimento de translação (mantendo a sua orientação paralela à orientação de {A}). Conseqüentemente, o ponto BP sofrerá também uma translação em relação ao referencial {A}, visto que BP é fixo
em {B}. Conhecendo BP e o movimento de translação de {B} em relação a {A}, (APB), o operador de translação permite obter a representação AP do ponto transladado em relação ao referencial {A}. Deste modo, em coordenadas cartesianas, temos:
AP = BP + AP B
Figura 2.16. Operador de Translação.
T(APB/APB,APB) =
I AP
B 0 0 0 1
{A}
{B} AP B
AP
BP
{A} = {B}
BP
Figura 2.17. Operador de Rotação.
Assim, os operadores de rotação para um deslocamento angular θ em torno dos eixos x, y e z são dados respectivamente por:
R(x,θ) =
0 cθ -sθ 0 0 sθ cθ 0 0 0 0 1
R(y,θ) =
cθ 0 sθ 0 0 1 0 0 -sθ 0 cθ 0 0 0 0 1
R(z,θ) =
0 cθ -sθ 0 0 sθ cθ 0 0 0 0 1
Operadores de Transformação :
Um Operador de Transformação aplicado sobre um vetor BP resulta num vetor AP (em coordenadas homogêneas), movimentado para uma localização genérica em
relação à sua localização inicial. Esta nova localização pode ser melhor descrita matematicamente como uma combinação de uma operação de rotação de um ângulo θ em torno do vetor unitário k seguida de uma operação de translação por uma distância APBao longo de um eixo unitário APB/APB.
Assim, em coordenadas cartesianas, a operação de transformação geral pode ser descrita matematicamente como:
AP = AR B.
BP + AP
B
Onde ARB representa a matriz de rotação equivalente à rotação de um ângulo θ em torno do vetor k. Então, o operador de transformação geral é dado por:
{A}
{B}
K ˆ
AP
θ
{A} = {B}
BP
AT
B = T(
AP
B/
AP
B,
AP
B).R(k,θ)
O operador de transformação ATB, aplicado a um ponto BP (em coordenadas homogêneas), resulta no ponto AP (também em coordenadas homogêneas):
AP = AT B.
BP
Figura 2.19. Operador de Transformação.
Exemplo : Dado o referencial {B} rotacionado 45° em torno do eixo zA e transladado a uma distância de duas unidades ao longo do eixo xA do referencial {A}, determinar as coordenadas do ponto BP = [1 1 0]T^ em relação ao referencial {A}.
Figura 2.20. Exemplo de operador de transformação.
AP
B = [2^0 0]
T
AP
= ARB APB
. BP
(1/2)1/2^ - (1/2)1/2^0
(1/2)1/2^ (1/2)1/2^0
⇒ AP = [2 (1/2)1/2^ 0]T
⇒ ATB =
AR
B
AP
B 0 0 0 1
AR
B =^
cos(45o) -sen(45o) 0 sen(45o) cos(45o) 0 0 0 1
{A} = {B}
{B}
{A}
{B}
BP
θ
BP
{A}
{I}
AP
BP
AP
B
{A} {B}
BP
Exemplo : seja a célula de trabalho mostrada na figura abaixo e dados os referenciais {B} (Base), {G} (Garra}, {E} (Estação) e {O} (Objeto}; determinar GTO a partir das transformações homogêneas conhecidas BTG , BTE , ETO.
Figura 2.21. Exemplo de equação de transformação.
Solução: GTO = GTB. BTO = GTB.(BTE.ETO) = BTG-1.(BTE.ETO)
2.3. Cinemática Direta:
O Problema da Cinemática Direta :
Do ponto de vista cinemático, o robô manipulador pode ser considerado como um conjunto de corpos rígidos, (chamados elos ), interligados numa cadeia cinemática aberta através de juntas, com uma extremidade fixa na base do manipulador e com uma garra ou ferramenta fixa na outra extremidade, que é livre.
Elo : corpo rígido que define a relação geométrica entre dois eixos de juntas vizinhas na cadeia cinemática. Para identificar elos usaremos números inteiros, de acordo com a seguinte convenção: a base do manipulador é o elo zero; os elos seguintes são numerados em ordem crescente na cadeia cinemática, da base até a ferramenta.
Junta : conexão entre dois elos vizinhos na cadeia cinemática. A partir do seu eixo se dá a movimentação relativa entre dois elos vizinhos. Para identificar juntas usaremos números inteiros, de acordo com a seguinte convenção: a junta mais próxima da base do manipulador é a junta 1; as juntas seguintes são numeradas em ordem crescente na cadeia cinemática, da base até a ferramenta.
Variável de Junta : grandeza que mede o deslocamento relativo entre dois elos vizinhos {i-1} e {i} interligados pela junta i. Para uma junta genérica i, utilizaremos a nomenclatura qi para denotar a variável de junta associada. Se a junta i for rotacional, a variável da junta i é o ângulo de junta θi. Se a junta i for prismática, a variável da junta i é o deslocamento de junta di. Um robô de N graus de liberdade possui N variáveis de junta, que são representadas pelo vetor de variáveis de junta q de dimensão Nx1.
{G}
{B}
{E}
{O}
GT
B O^ =?
TG
BT
E
ET
O
O problema de Cinemática Direta de robôs manipuladores consiste em determinar a localização da garra (e eventualmente de cada elo do manipulador) a partir do valor atual das variáveis de junta (ângulos ou deslocamentos de junta). O problema da cinemática direta pode ser resolvido para qualquer robô manipulador serial utilizando transformações homogêneas que relacionam a localização de um elo em relação ao elo anterior na cadeia cinemática. A solução do problema da cinemática direta é única. Esta solução pode ser obtida em forma analítica fechada ou em forma numérica através de um procedimento sistemático.
A seguir, apresenta-se um método sistemático para solução do problema da cinemática direta de robôs manipuladores. Para esta solução é necessário caracterizar matematicamente os elos do robô através de referenciais e parâmetros cinemáticos atribuídos de acordo com convenções apropriadas. A notação Denavit-Hartenberg é uma destas convenções que permite solucionar o problema da cinemática direta de uma maneira simples e sistemática.
Notação Denavit Hartenberg :
Convenção para atribuição de Referenciais de Elo:
- Os elos são numerados partindo da base do robô, à qual associa-se o referencial {0}, e prosseguindo em ordem crescente na cadeia cinemática em direção à ferramenta.
- As juntas correspondentes são numeradas da mesma maneira, recebendo o mesmo número que o elo que, dentre os dois que são associados à mesma, seja o mais distante da base na cadeia cinemática.
- O eixo zi do referencial do elo {i} é coincidente com o eixo de movimento da junta i.
- A origem de {i} é estabelecida na interseção entre o eixo zi e a reta normal a zi e zi+1.
- O eixo xi é estabelecido sobre a reta normal a zi e zi+i e apontando de zi para zi+1.
- O eixo yi é definido pela regra da mão direita.
Casos especiais:
- O eixo zi intersecta o eixo zi+1: o eixo xi é estabelecido sobre a reta normal ao plano formado por zi e zi+1, na direção do vetor zi×zi+1.
- Extremidades da cadeia cinemática:
- À base do robô é fixo um referencial {0}, que define arbitrariamente a localização do elo {1} para a qual a variável da junta 1 é igual a zero. - O referencial {0} é atribuído de maneira a ser coincidente com o referencial {1} quando a variável da junta 1, q 1 , for igual a zero.
- Ao último elo (no qual está fixa a ferramenta) são fixos dois referenciais: um na junta associada (referencial {N}} e outro na ponta da ferramenta {N+1}. - O referencial {N} é atribuído de maneira a ser coincidente com o referencial de elo {N-1} quando a variável da junta N, qN, for igual a zero. - O referencial {N+1) é posicionado na ponta da ferramenta e com a mesma orientação do referencial {N}.