Baixe Cinemática Direta e outras Manuais, Projetos, Pesquisas em PDF para Mecatrônica, somente na Docsity!
Cinemática da Posição de Robôs Manipuladores 1
Capítulo 5
CINEMÁTICA DIRETA DE ROBÔS
MANIPULADORES
A cinemática de um robô manipulador é o estudo da posição e da velocidade do seu efetuador e dos seus ligamentos. Quando se menciona posição, está se referindo tanto à posição propriamente dita, como à orientação e quando se fala em velocidade, considera-se tanto a velocidade linear como angular. Pode-se distinguir dois tipos de cinemática, a cinemática direta e a inversa. Na cinemática direta deseja-se obter a posição e velocidade do efetuador, para uma dada posição das articulações. A cinemática inversa é o oposto da cinemática direta, ou seja, são fornecidas a posição e a velocidade do efetuador e quer se obter as posições e velocidades correspondentes das articulações.
No capítulo 4 foram vistas as ferramentas matemáticas necessárias para se determinar a posição e orientação de corpos rígidos que se baseia na transformação de coordenadas. Neste capítulo, é apresentada a cinemática direta. A cinemática inversa será analisada no capítulo 5. Observa-se que neste capítulo, será visto como se calcula a posição, a orientação, a velocidade linear e angular do efetuador de um robô manipulador. A posição e velocidade dos outros ligamentos do robô podem ser facilmente calculadas de forma análoga às do efetuador.
3.1 Posição e Orientação do Efetuador
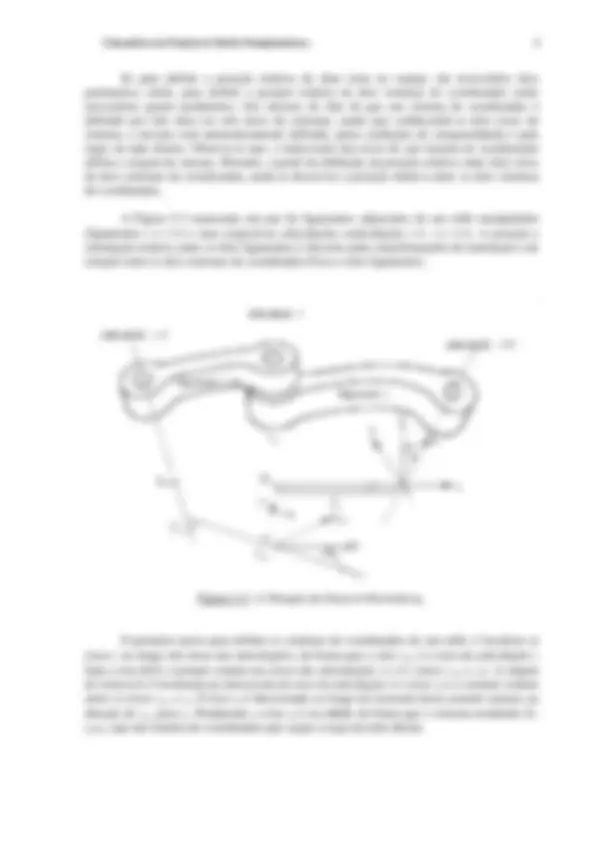
Um manipulador consiste basicamente de uma série de corpos rígidos unidos entre si por articulações. A Figura 5-1, mostra um esquema de um manipulador. Será considerado somente manipuladores com estrutura cinemática do tipo aberta, como foi visto no capítulo 2.
Cada ligamento do manipulador pode ser numerado de 0 a n , como mostra a Figura 5-1. O ligamento da base, que é usualmente fixo em relação ao mundo externo, é numerado por conveniência como 0 e o efetuador, que é o último ligamento, é numerado como n. O objetivo é analisar a posição e a orientação do efetuador em função da posição de cada uma das articulações.
Para representar a posição e a orientação do efetuador, é posicionado o sistema de coordenadas On -x (^) n y (^) n z (^) n no efetuador. A posição e orientação deste sistema de coordenadas é descrito em relação ao sistema O 0 -x 0 y 0 z 0 , fixo na base, isto é, no primeiro ligamento. Define- se, também, para cada um dos demais ligamentos, um sistema de coordenadas Oi -x (^) i y (^) i z (^) i. É
possível determinar a posição e a orientação do sistema i em relação ao sistema anterior, i − 1 ,
pelo uso de matrizes homogêneas relacionando a transformação entre estes sistemas. Dessa forma, a posição e a orientação do efetuador em relação à base é obtida por uma composição de transformações homogêneas consecutivas, partindo-se do sistema da base para o último sistema (sistema do efetuador).
Para posicionar os sistemas de coordenadas nos ligamentos do manipulador de forma
Análise de Robôs (E. L. L. Cabral) 2
sistemática, é utilizada a notação de Denavit-Hartenberg. A notação de Denavit-Hartenberg é um método sistemático de descrever a posição e a orientação relativa entre dois ligamentos consecutivos, baseado na transformação homogênea.
Figura 5-1: Esquema da Estrutura de um Manipulador.
Notação de Denavit-Hartenberg
A Notação de Denavit-Hartenberg baseia-se no fato de que para determinar a posição relativa de duas retas no espaço, são necessários somente dois parâmetros. O primeiro parâmetro é a distância medida ao longo da normal comum entre as duas retas e o segundo é o ângulo de rotação em torno da normal comum, que uma das retas deve girar, de forma que fique paralela à outra. Observa-se que a normal comum entre duas retas no espaço é definida por uma terceira reta que intercepta as duas primeiras retas, com ângulos de 90°. Além disso, a distância medida entre as duas retas, ao longo da normal comum, é a menor distância entre as mesmas. A Figura 5-2 apresenta duas retas no espaço e os dois parâmetros necessários para descrever sua posição relativa.
-^ a^ •
Normal comun
Figura 5-2: Posição relativa de duas retas no espaço.
Análise de Robôs (E. L. L. Cabral) 4
A posição relativa entre dois sistemas de coordenadas consecutivos, sistemas Oi − 1 - x (^) i − 1 y (^) i − 1 z (^) i − 1 e Oi -x (^) i y (^) i z (^) i , é completamente determinada pelas posições relativas entre os eixos x (^) i − 1 e x (^) i , e entre os eixos z (^) i e z (^) i − 1 , que são definidas pelos quatro parâmetros seguintes:
- a (^) i : é a distância (em módulo) entre z (^) i − 1 e z (^) i , medida ao longo do eixo x (^) i , que é a normal comum entre z (^) i − 1 e z (^) i , ou seja, é a distância Hi Oi ;
- α i : é o ângulo (com sinal) entre o eixo z (^) i − 1 e o eixo z (^) i , medido em torno do eixo x (^) i , segundo a regra da mão direita, ou seja, é o ângulo de rotação em torno do eixo x (^) i , que o eixo z (^) i − 1 deve girar para que fique paralelo ao eixo z i ;
- d (^) i : é a distância (com sinal) entre os eixos x (^) i − 1 e x (^) i , medida sobre o eixo z (^) i − 1 (que é a normal comum entre x (^) i − 1 e x (^) i ), partindo-se de Oi − 1 e indo em direção à Hi. O sinal de di é positivo, se para ir de Oi − 1 até Hi , caminha-se no sentido positivo de z (^) i − 1 , e negativo, se caminha-se no sentido oposto de z (^) i − 1 ;
- θ i : é o ângulo (com sinal) entre o eixo x (^) i − 1 e o eixo x (^) i , medido em torno do eixo z (^) i − 1 , segundo a regra da mão direita, ou seja, é o ângulo de rotação em torno do eixo z (^) i − 1 , que o eixo x (^) i − 1 deve girar para que fique paralelo ao eixo x (^) i.
Com estes quatro parâmetros, a posição e orientação do sistema de coordenadas i em relação ao sistema i −1 pode ser definida como uma sequência de quatro transformações:
- A primeira transformação, consiste em uma rotação em torno de z (^) i − 1 , de um ângulo
θ i , medido segundo a regra da mão direita, de forma a alinhar x i − 1 com x i :
- A segunda transformação, é uma translação ao longo do eixo z (^) i − 1 , de uma distância di , medida a partir do ponto Oi − 1 , até encontrar a intercessão da normal comum entre z (^) i − 1 e z (^) i (ponto Hi );
- A terceira transformação, consiste em uma translação ao longo do eixo x (^) i , de uma distância a (^) i , partindo-se do ponto Hi até encontrar o eixo z (^) i (ponto Oi ); e
- A quarta transformação consiste em uma rotação em torno do eixo x (^) i , de um ângulo α i , medido segundo a regra da mão direita, de forma a alinhar o eixo z (^) i − 1 com o eixo z (^) i.
Assim, tem-se, em resumo, as seguintes transformações:
A ii − 1 = Rot ( z ,θ i ) Trans ( z , di ) Trans ( x , ai ) Rot ( x , α i ), (5-1)
onde os símbolos Rot e Trans significam respectivamente transformação de rotação e de translação. Em termos de transformações homogêneas, tem-se o seguinte:
. (5-2)
0 0 0 1
0
cos
0 0 0 1
0 0
0 0
1 0 0 0
0 0 0 1
0 0 1 0
0 1 0 0
1 0 0
0 0 0 1
0 0 1
0 1 0 0
1 0 0 0
0 0 0 1
0 0 1 0
0 0
0 0
−
−
=
−
−
− =
i i i
i i i i i i i
i i i i i i i
i i
i i
i
i
i i
i i
S C d
S C C S aS
C S C S S aC
S C
C S
a
d
S C
C S
α α
θ θ α θ α θ
θ θ α θ α θ
α α
θ θ α α
θ θ i Ai 1
Os parâmetros a i e αi são constantes e são determinados pela geometria do ligamento
i. Um dos outros dois parâmetros, di ou θ i , varia a medida que a articulação se move. Como
Cinemática da Posição de Robôs Manipuladores 5
visto no capítulo 2, existem dois tipos de articulações em braços robóticos: articulações de revolução (ou de rotação) e articulações lineares (ou prismáticas). Se a articulação i for de
revolução, o parâmetro θ i é variável e representa a sua posição angular, enquanto o parâmetro
di é constante. Se a articulação i for prismática, o parâmetro di é a variável que representa a
sua posição linear e o parâmetro θ i é constante.
Existem algumas exceções à notação de Denavit-Hartenberg , sendo estas as seguintes:
- Para estabelecer o sistema de coordenadas da base, a origem do sistema pode ser escolhida em qualquer ponto do eixo z 0. Os eixos x 0 e y 0 , podem ser escolhidos arbitrariamente, desde que satisfaçam a regra da mão direita;
- Para estabelecer o sistema de coordenadas do efetuador, a origem do sistema pode ser escolhida em qualquer ponto conveniente do efetuador. A orientação dos eixos deve ser tal que x (^) n seja perpendicular a z (^) n − 1 ;
- Se os eixos das duas articulações de um ligamento são paralelos, a normal comum entre eles não é única. Neste caso, a direção de x (^) i − 1 deve ser perpendicular a ambos os eixos e a origem Oi é arbitrária;
- Se os eixos das duas articulações de um ligamento se interceptam, ou seja, se z (^) i − 1 intercepta z (^) i , a origem Oi deve ser localizada na interseção dos dois eixos e x (^) i deve ser perpendicular a ambos os eixos.
Posição e Orientação do Efetuador
Com a notação de Denavit-Hartenberg definida, pode-se obter a posição e orientação do efetuador em relação ao sistema da base (sistema O 0 - x 0 y 0 z 0 ) em função dos deslocamentos
de todas as articulações. O deslocamento de cada articulação é dada por di ou θ i , dependendo
do tipo de articulação. Para facilitar a nomenclatura, a posição das articulações será denotada por qi , definido como:
qi = θ i , se a articulação i for de revolução; e
qi = di , se a articulação i for prismática.
Dessa forma, a posição e orientação do ligamento i relativo ao ligamento i −1 é descrita em
função de qi , através da matriz homogênea A ii − 1 ( qi ).
Como visto, um manipulador consiste de n + 1 ligamentos, com a base sendo o ligamento 0 e o efetuador o ligamento n. Portanto, do efetuador à base existem n transformações homogêneas consecutivas, assim, a posição e orientação do efetuador é dada por:
A n 0 = A^10 ( q (^) 1 )A^21 ( q 2 )...Ann − 1 ( qn ) , (5-3)
onde, A 0 n^ é a matriz homogênea que representa a posição e orientação do efetuador em
relação ao sistema da base, em função das posições de todas as articulações. Como A n 0 é uma
matriz homogênea ela tem a seguinte forma:
A
R x (^00 )
n 0
n 0
n (q ,...,q )
(q ,...,q ) (q ,...,q ) n
n n 1
= ^1
.^ (5-4)
Cinemática da Posição de Robôs Manipuladores 7
xn (direção normal)
zn (direção de ataque)
yn (direção de escorregamento)
Articulação n
Efetuador
zn − 1
On
θ n
Figura 5-4: Sistema de coordenadas do efetuador.
Exemplo 5.1 : Robô plano de duas articulações de revolução (2R).
A Figura 5-5 apresenta um esquema de um robô plano de duas articulações de revolução, com os sistemas de coordenadas posicionados nas articulações e no efetuador.
O 0
x 0
y 0
O 1
x 1
y 1
O 2
x 2
y 2
a 1 a 2
Figura 5-5: Esquema de um robô plano com duas articulações de revolução.
Os parâmetros de Denavit-Hartenberg para este robô são definidos na Tabela 5-1.
Tabela 5-1: Parâmetros de Denavit-Hartenberg do robô plano com dois graus de liberdade de revolução.
Ligamento a i αi d i θi
1 a 1 0 0 θ 1
2 a 2 0 0 θ 2
Análise de Robôs (E. L. L. Cabral) 8
Com estes parâmetros de Denavit-Hartenberg e a eq. (5-2) pode-se definir as matrizes de transformação homogênea do sistema de coordenadas da base para o sistema 1 e do sistema 1 para o sistema 2, fixo no efetuador, como abaixo.
A 01 =
C S a C S C a S
1 1 1 1 1 1 1 1
, e A 12 =
C S a C S C a S
2 2 2 2 2 2 2 2
onde os símbolos S 1 , C 1 significam respectivamente o seno e o coseno de θ 1 e S 2 , C 2
significam respectivamente o seno e o coseno de θ 2. A multiplicação destas duas
matrizes resulta na matriz de transformação homogênea da base para o efetuador, como se segue:
A 02 = A A^1012 =
C S a C a C S C a S a S
12 12 1 1 2 12 12 12 1 1 2 12
onde S 12 e C 12 representam respectivamente o seno e o coseno de θ 1 + θ 2. Nota-se que
os dois primeiros elementos da quarta coluna são as componentes x e y do ponto O 2 , ou seja, as coordenadas do efetuador descritos em relação o sistema da base ( O 0 - x 0 y 0 z 0 ). Observa-se, também, que a orientação do efetuador é dada por uma rotação em torno do
eixo z 0 de um ângulo θ 1 + θ 2.
Exemplo 5.2 : Robô de Stanford. A Figura 5-6 apresenta o robô de Stanford de 6 graus de liberdade, sendo 5 articulações de revolução e uma prismática.
A Figura 5-7 apresenta um esquema deste robô com as suas articulações e com os sistemas de coordenadas posicionados nos ligamentos. Os parâmetros de Denavit- Hartenberg correspondentes aos sistemas de coordenadas definidos na Figura 5-7 são apresentados na Tabela 5-2. Note que na configuração instantânea da Figura 5-7, o manipulador apresenta os sistemas de coordenadas 3 e 5 como sendo coincidentes e o eixo x 4 também coincidente com x 3. Contudo, qualquer alteração nas posições das
articulações 4 e 5 (ângulos θ 4 e θ 5 ) fará com que a coincidência destes eixos e destes
sistemas seja eliminada.
Tabela 5-2: Parâmetros de Denavit-Hartenberg do robô de Stanford.
Ligamento a i αi d i θi
1 0 -90° l 1 θ 1 *
2 0 90 ° l 2 θ 2 *
3 0 0 d 3 * 0
6 0 0 l 6 θ 6 *
Análise de Robôs (E. L. L. Cabral) 10
z 0
y 0
x 0
l 1
x 1
z 1
l 2
x 2
z 2
O 0
O 1 O 2
d 3
z 4
z 6
z 3 ≡ z 5
x 6
O 6
l 6
O 3
x 3 ≡ x 4 ≡ x 5
Figura 5-7: Esquema do robô de Stanford com os sistemas de coordenadas das articulações.
A posição e orientação do efetuador é obtida a partir das matrizes homogêneas acima e da eq. (5-3), resultando no seguinte:
A 06 = A A A A A A 01 12 23 34 45 56 =
r r r x r r r y r r r z
o
1 1 1 2 1 3 0
6
2 1 2 2 2 3
6
3 1 3 2 3 3 0
6
0 0 0 1
, , , , , , , , ,
onde os elementos da matriz A 06 acima, são dados pelas expressões seguintes:
[ ]
[ ]
r C C C C C S S S S C S S C C C S
r S C C C C S S S S C C S C C C S
1 1 1 2 4 5 6 4 6 2 5 6 1 4 5 6 4 6
2 1 1 2 4 5 6 4 6 2 5 6 1 4 5 6 4 6
,
,
Cinemática da Posição de Robôs Manipuladores 11
[ ]
[ ]
r S C C C S S C
r C C C C S S C S S S S S C S C C
r S C C C S S C S S S C S C S C C r S C C S S C C
3 1 2 4 5 6 4 6 2
1 2 1 2 4 5 6 4 6 2 5 6 1 4 5 6 4 6
2 2 1 2 4 5 6 4 6 2 5 6 1 4 5 6 4 6 3 2 2 4 5 6 4 6 2
,
,
, ,
S C ;
S S ;
5 6
5 6 r C C C S S C S r S C C S S C C r S C S C C x C S d S l l C C C S C S C S S S y S S d C l l S C C S S S C C
1 3 1 2 4 5 2 5 1 2 3 1 2 4 5 2 5 1 3 3 2 4 5 2 5 0
6 1 2 3 1 2 6 1 2 4 5 1 2 5 1 4 5 0
6 1 2 3 1 2 6 1 2 4 5 1 2 5 1
, , ,
S S ;
S S ;
4 5 4 5
S S
z (^) o l C d l C C S C S
4 5 6 1 2 3 6 2 5 2 4 5
Observa-se que os elementos r (^) i,j formam a matriz de rotação da transformação do sistema da base para o sistema do efetuador, ou seja, a orientação do efetuador, e os elementos, x (^) 06 , y (^) 06 , e z 06 representam a posição do efetuador.
3.2 Velocidade do Efetuador
Pode-se definir o vetor q , como sendo um vetor coluna, que contém as posições de todas as articulações, da seguinte maneira, q = (q 1 , q 2 ,..., qn ) t^. Nota-se que o vetor q tem dimensão n x1, onde n é o número de articulações. O objetivo é encontrar o vetor velocidade linear, v (^) n ( ) q , e o vetor velocidade angular do efetuador, w (^) n ( ) q , descritos em relação ao
sistema de coordenadas da base, em função das velocidades das articulações.
Velocidade Linear do Efetuador
Como visto, x n 0 ( ) q é o vetor de posição do efetuador em relação ao sistema da base,
sendo função das posições de todas as articulações. Portanto, para obter a velocidade linear do efetuador, basta derivar este vetor em relação ao tempo, ou seja:
v
x n
0
n = =
d dt
dx dt dy dt dz dt
n
n
n
0
0
0
onde x (^) 0 n , y (^) on, e zon são as componentes x , y e z do vetor posição do efetuador. Como o vetor
x 0 n^ é função da posição de todas as articulações, as derivadas das suas componentes em
relação ao tempo são obtidas pela regra da cadeia, sendo dadas por:
v x
x q
q
x q
q
x q n x n q
n n n
n
, =^ &^0 =^ &^ +^ &^ +...^ + & n
0 1
1
0 2
2
Cinemática da Posição de Robôs Manipuladores 13
sistema de coordenadas do efetuador, ponto On , descrito em relação ao sistema de coordenadas da base.
Observando as eq. (5-12) e (5-13) pode-se concluir que a coluna i da matriz Jv é dada por:
×
− −
− , seaarticulacão forde revolucão.
, seaarticulacão forprismatica,e i
i i i 1 i1, n
i 1 v (^) z r
z J (5-14)
Velocidade Angular do Efetuador
A velocidade angular do ligamento i ou, do sistema de coordenadas i , relativa ao
sistema de coordenadas i −1, expressa no sistema de coordenadas i −1, w i^ (i^ −1)^ , é dada pela
seguinte expressão:
w
k i
(i ) qi^ i i
1 0
, se a articulacao for de revolucao; se a articulacao for de translacao;
onde k é o eixo da articulação i visto pelo sistema de coordenadas i −1, ou seja, k = ( 0, 0, 1 ) t^.
Observa-se que w (^) i^ (^ i^ −^1 )^ é a velocidade angular da articulação i vista pelo sistema de
coordenadas fixo na própria articulação (sistema i −1).
Para exprimir a velocidade angular w (^) i^ (^ i^ −^1 )^ em relação ao sistema de coordenadas da
base, basta descrever o versor k em relação ao sistema da base. Para isso realiza-se a transformação de rotação que leva o sistema da base ao sistema i −1, ou seja,
R i 0^ −^^1 w (^) i (^ i −^1 )^ = R 0 i^ −^1 q & (^) i k = q & i zi − 1. (5-16)
Note que o produto R 0 i^ −^^1 k representa o versor do eixo da articulação i (eixo z (^) i − 1 ) descrito em
relação ao sistema de coordenadas da base, que é denominado por zi − 1.
A velocidade angular do efetuador descrita em relação ao sistema da base, é a soma das velocidades angulares de todos os ligamentos, expressas todas em relação ao sistema de coordenadas da base. Assim, a velocidade angular do efetuador, descrita em relação à base, é dada por:
w n = ρ 1 w 1 (^^0 )^ + ρ 2 R w 01 2 (^^1^ ) + ... + ρ n R 0 n 1 −^ wn (n −^^1 )^. (5-17)
Obviamente, se a articulação i for prismática, ela não contribui para a velocidade angular do
efetuador. Para considerar este efeito, na equação acima, foi introduzido o parâmetro ρ i , que
representa o seguinte:
0 ,seaarticulacão fordetranslacão.
1 ,seaarticulacão forderevolucão; i
i
ρ i
Análise de Robôs (E. L. L. Cabral) 14
A velocidade do efetuador escrita em função das velocidades das articulações, pode ser obtida pela substituição da eq. (5-16) na expressão acima, obtendo-se o seguinte resultado:
w (^) n = ρ i q & 1 z 0 + ρ 2 q & 2 z 1 + ... + ρ n q & n zn 1 −. (5-18)
Esta equação pode ser escrita de forma matricial, da seguinte maneira:
w (^) n = J (^) w ( ) q q &^ , (5-19)
onde Jw é uma matriz de dimensão 3x n , cujas colunas são os eixos das articulações descritas no sistema da base multiplicados por um indicador que fornece o tipo da articulação, ou seja,
J w = [ ρ 1 z 0 , ρ 2 z 1 , K , ρ n zn 1 −]. (5-20)
Observa-se que cada coluna de Jw representa a contribuição da respectiva articulação na velocidade angular do efetuador.
5.3 Matriz Jacobiano de um Manipulador
Pode-se unir as relações das velocidades linear e angular do efetuador em função das velocidades das articulações em uma mesma equação, resultando no seguinte:
v w
J q J q
q n n
V W
=^
ou, definindo o vetor Vn = ( v , w (^) n n ) t^ , tem-se:
Vn = J q q ( ) &^. (5-22)
A matriz J ( q ) é definida como sendo a Matriz Jacobiano do efetuador. Esta matriz relaciona as velocidades linear e angular do efetuador, expressas no sistema de coordenadas da base, com as velocidades das articulações, para uma dada configuração do manipulador.
Em resumo, a coluna i da Matriz Jacobiano de um manipulador é dada pela seguinte expressão:
J
z r i z
i 1 i 1,n i 1
×
− − −
, se a articulação i for de revolução; e (5-23)
J
z i
i 1
− 0
, se a articulação i for de translação. (5-24)
A dimensão da Matriz Jacobiano é m x n , onde m é o número de linhas, que é igual ao número de graus de liberdade do campo de trabalho do robô e n é o número de colunas, que é igual ao número de articulações do robô. Para um robô que trabalha no espaço, m será no máximo igual a 6 e para um robô que trabalho no plano, m será no máximo igual a 3. Os 6 graus de liberdade do espaço correspondem aos três graus de liberdade de posicionamento e
Análise de Robôs (E. L. L. Cabral) 16
v 2 =
( ) &^ &
( ) &^ &
a S a S a S a C a C a C
1 1 2 12 1 2 12 2 1 1 2 12 1 2 12 2 0
θ θ θ θ ; w (^) 02 1 2
θ&^ θ&
Observa-se que a velocidade linear do efetuador poderia também ser obtida pela derivação no tempo do vetor posição do efetuador ( O O 0 2 ), conforme as eq. (5-6), (5-7) e (5-8), resultando exatamente na mesma expressão acima.
Exemplo 5.4: Velocidade linear e angular do centro do segundo ligamento de um robô de três articulações de revolução no plano.
O 0
x 0
y 0
θ 1
O 1
x 1
y 1
θ 2
O 2
x 2
y 2 θ 3
O 3
x 3
y 3
O c
l c
a 1
Figura 5-8: Esquema de um robô plano com três articulações de revolução.
A Figura 5-8 apresenta um esquema do robô de 3 articulações no plano. Da mesma forma que realizado no exemplo anterior, a eq. (5-23) pode ser aplicada para se obter a velocidade angular e linear de qualquer ponto dos ligamentos de um robô. A única diferença é que os vetores posição utilizados relaciona a posição do ponto desejado ao centro de cada um dos sistemas de coordenadas, como se segue:
J
z z z z
0 1 0 1
× ×
O O 0 (^) c 2 O O 1 c 2 0 0
onde;
O O
a C 0 1 a S
1 1 1 1 0
; O O
a C l C c a S^ l^ S
c 0 2 c
1 1 2 12 1 1 2 12 0
Cinemática da Posição de Robôs Manipuladores 17
O O O O O O
l C c c l^ S
c 1 2 0 2 0 1 c
2 12 2 12 0
; z 0 = z 1 =
Observa-se que a terceira coluna da Matriz Jacobiano neste caso é igual a zero porque a velocidade linear e angular do segundo ligamento não é afetada pelo movimento da terceira articulação.
Substituindo as expressões dos vetores de posição e dos eixos das articulações na expressão da Matriz Jacobiano resulta em:
J =
a S l S l S a C l C l C
c c c c
1 1 2 12 2 12 1 1 2 12 2 12 0 0 0 0 0 0 1 1
As velocidades linear e angular do centro do segundo ligamento são obtidas pela multiplicação da Matriz Jacobiano correspondente pelo vetor velocidade das articulações, resultando no seguinte:
v (^) c2 =
( ) &^ &
( ) &^ &
a S l S l S a C l C l C
c c c c
1 1 2 12 1 2 12 2 1 1 2 12 1 2 12 2 0
θ θ θ θ ; w (^) c2 =
1 2
θ^ & θ&
5.4 Velocidade Angular
Um dos conceitos mais complexos na área de cinemática de corpos rígidos é o conceito de velocidade angular. Este fato é reconhecido por diversos atores, podendo-se destacar algumas citações, como as seguintes:
- T.R. kane (1978): “A velocidade angular parece ser um dos conceitos mais problemáticos”;
- H. Cheng (1989): “Muitos livros não fornecem uma definição clara e útil para rotações genéricas espaciais e não as distingue de rotações em torno de um eixo fixo”.
A definição encontrada para a velocidade angular de um corpo rígido na maioria dos livros, é a seguinte:
w t t
∆→
lim 0 ∆
Cinemática da Posição de Robôs Manipuladores 19
Por outro lado, tem-se que a velocidade linear do ponto P , cuja posição é definida pelo vetor r 0 no sistema O 0 - x 0 y 0 z 0 , fixo em um corpo rígido girando com velocidade angular w em relação ao sistema O 0 - x 0 y 0 z 0 , é dada pela seguinte expressão:
v = w × r 0 , (5-28)
onde o símbolo × denota produto vetorial. Esta expressão pode ser escrita de outra forma mais conveniente, ou seja,
v = Ω r 0 , (5-29)
onde Ω é uma matriz de dimensão 3x3, dada por,
w w w w w w
z y z x y x
Observa-se que as expressões (5-28) e (5-29) fornecem o mesmo resultado, sendo que a matriz Ω representa simplesmente uma forma mais conveniente de escrever o vetor velocidade angular de um corpo rígido. Substituindo a expressão (5-26) na eq. (5-30), resulta no seguinte:
v = Ω Rr (^) 1. (5-31)
Igualando-se as expressões (5-27) e (5-31) obtém-se uma relação entre a derivada da matriz de rotação e a velocidade angular, ou seja:
R^ & = Ω R , (5-32)
ou, invertendo-se,
Ω = RR & t^. (5-33)
Estas duas expressões são muito importantes, pois elas relacionam a velocidade angular de um corpo com a matriz de rotação e com a derivada da matriz de rotação. Observa-se que a matriz de rotação R representa a orientação do corpo no sistema O 0 - x 0 y 0 z 0 e a sua derivada representa a variação da orientação do corpo.
5.5 Variação da Orientação do Efetuador
Observa-se que na expressão (5-21), a velocidade linear do efetuador pode ser obtida simplesmente pela derivação no tempo da posição do efetuador. Assim, se for conhecida a posição inicial do efetuador e a sua velocidade linear em função do tempo, a posição do efetuador em qualquer instante pode ser calculada pela integração da sua velocidade no tempo. Contudo, o mesmo raciocínio não é válido para a orientação, pois, no caso de robôs manipuladores, o eixo instantâneo de rotação normalmente não é conhecido, além de variar a todo instante. Dessa forma, a integração da velocidade angular do efetuador não fornece a sua
Análise de Robôs (E. L. L. Cabral) 20
posição angular ou, sua orientação. Nestes casos, a parcela da eq. (5-21) que fornece a velocidade angular do efetuador em função das velocidades das articulações às vezes não é muito útil. Nesta seção será obtida uma expressão para descrever a variação da orientação do efetuador em função das velocidades das articulações.
Como visto na seção 5.1, a orientação do efetuador é função das posições das articulações, dessa forma, pode-se definir o seguinte sistema de equações não lineares:
y 0 n^ = f q ( ) , (5-34)
onde o vetor y n 0 , de dimensão m x1, contém a orientação do efetuador e f é um vetor de
funções de dimensão m x1. A orientação do efetuador pode ser descrita por diversos parâmetros, como por exemplo, os elementos da matriz de rotação, os ângulos de Euler, os parâmetros de Euler-Rodrigues e outros.
A partir da teoria de cálculo diferencial, dado o sistema de equações não lineares, da forma da eq. (5-34), a derivada em relação ao tempo da orientação do efetuador, ou seja, do
vetor y 0 n^ é dada por:
y^ &^ 0 n = J (^) o ( ) q q &, (5-35)
onde Jo é uma matriz jacobiano de dimensão m x n. Podem existir várias matrizes Jo , dependendo dos parâmetros utilizados para descrever a orientação do efetuador contidos no
vetor y 0 n^. Assim, se for utilizada a matriz de rotação, como obtido na eq. (5-4), repetida
abaixo:
A
R x (^00 )
n 0
n 0
n (q q )
(q q ) (q q ) n
n n 1
,..., = ^1 ,...,^1 ,...,
,^ (5-4)
tem-se, para o vetor y 0^ n^ , o seguinte:
y 0 n^ = ( r 1 1 (^) , , r 1 2 (^) , , K , r 3 3,)t^ (5-36)
e para a matriz Jo ,
J (^) o =
r q
r q
r q r q
r q
r q
r q
r q
r q
n
n
1 1 1
1 1 2
1 1
1 2 1
1 2 1
1 2 1
3 3 1
3 3 2
3 3
, , ,
, , ,
, , ,
K
L
M M M M
K
onde r (^) i,j é o elemento da i -ésima linha e j -ésima coluna da matriz R 0 n^. Observa-se que neste
caso o vetor y 0 n^ terá dimensão 9x1.