Baixe Modelagem e Análise de Filas: Conceitos e Aplicações e outras Notas de estudo em PDF para Engenharia Agrícola, somente na Docsity!
2. MODELOS DE FILAS E ESTOQUES
COM CHEGADAS E ATENDIMENTOS
INDIVIDUAIS
Uma forma simples de mostrar fisicamente o problema de acúmulos em um sistema (engenheiros, arquitetos e outros técnicos envolvidos no processo de planejar e operar sistemas, normalmente apreciam analogias físicas), é o de representar o sistema por um silo de armazenagem de grãos, ou uma caixa d`água, com um duto de entrada e um duto de saída, cada qual dotado de um registro que permite controlar a vazão através do duto.
O duto de entrada com seu dispositivo de controle de vazão representa o processo de chegada ao sistema, e o duto de saída com os seu dispositivo de controle de vazão o(s) posto(s) de atendimento no caso de problemas de filas, e o processo de saída da área de armazenagem no caso de problemas de estoques.
Para representar fenômenos reais é necessário admitir que, nos casos em que a natureza discreta dos "clientes" de um serviço é importante para a correta descrição do fenômeno, os grãos do silo têm dimensão comparável com o diâmetro dos dutos de entrada e saída, de forma que apenas um elemento consegue fluir através de uma seção de controle por vez.
Como em todo processo de aprendizado é necessário primeiro andar para depois correr, utilizaremos o modelo analógico para descrever inicialmente as filas mais simples, que são aquelas em que tanto o fluxo de chegadas como o fluxo de atendimento são de natureza determinística, ou seja, não existem oscilações de natureza aleatória no entorno de valores médios desses fluxos.
Tentar-se-á dessa forma, apresentar o fenômeno de formação de filas ou estoques, através de uma representação gráfica, sem as complexidades associadas à representação matemática de modelos probabilísticos 1 , forma tradicional de apresentação do problema em livros texto 2.
2.1 A Fila com Um Canal de Atendimento
2.1.1 A Fila Determinística
Fluxo discreto
A Figura do tubo apresentada abaixo ilustra o problema: clientes (pessoas ou objetos) chegam a um sistema de processamento qualquer (e.g. caixa de supermercado), ultrapassando uma seção de controle de entrada no sistema, para serem processados em um canal de atendimento, neste caso representado pelo duto de saída onde cabe exatamente um cliente antes da válvula de liberação, cujo instante de abertura define o fim do atendimento e a conseqüente saída do cliente do sistema.
(^1) modelos probabilísticos de filas são o mesmo que modelos estocásticos de filas
(^2) ver por exemplo Hillier & Lieberman (1988) cap.
Chamamos este modelo de determinístico pois admitimos implicitamente que o instante de chegadas das bolas ao tubo é conhecido e que o tempo de atendimento é fixo, no caso representado igual a 1 unidade de tempo. Em outras palavras, se as chegadas estão programadas na forma apresentada no gráfico da Figura 2.1, o tempo de atendimento é 1 unidade de tempo e temos apenas um canal de atendimento, então da para prever que se formará uma fila nos períodos 2-3 e 5-9. Vê-se portanto que no caso de fluxos determinísticos só há acúmulo no tubo quando, por razões previsíveis ou programas previamente estabelecidos, chegam mais bolas às caixas em um intervalo ∆t do que o sistema consegue liberar através do canal de atendimento, ou seja, quando temporariamente o fluxo médio de chegadas é maior que o fluxo médio de atendimento.
De uma forma mais sintética podemos descrever esse nosso sistema da seguinte forma:
Figura 2.2: Seções de controle de uma fila
Como mostra a Figura 2.2 o nosso sistema é formado por dois componentes: a fila (ou as filas) e o canal de atendimento (ou os canais de atendimento).
No nosso caso simples temos apenas uma fila e um canal de atendimento.
controle 1Seção de (início da fila)
controle 2Seção de (fim da fila - iníciodo atendimento) controle 3Seção de (fim do atendimento)
Fila Canal de atendimento
SISTEMA
Para descrever o nosso fenômeno é necessário que conheçamos algumas das suas características. Essas características serão observadas nas seções de controle.
Na seção de controle 1, observamos os instantes em que os elementos chegam ao sistema ( ou o intervalo entre chegadas sucessivas). Se não houver fila ( o tubo de bolinhas estiver vazio), a seção de controle 1 coincide com a seção de controle 2, ou seja, o elemento entra no sistema no momento em que ele entra no canal de atendimento. Se houver fila, a seção de controle 1 vai se deslocando à medida em que a fila cresce/decresce.
Na seção 2 observamos os instantes em que os elementos entram no canal de atendimento e na seção 3 os instantes em que eles saem do canal de atendimento, liberando-o para o próximo atendimento.
Com essa descrição do sistema é agora possível representar uma fila através de um gráfico (Figura 2.3) no qual plotamos os instantes (^) t (^) c (^) i - instante de chegada do
i- ésimo elemento ao sistema, (^) t (^) ei - instante de entrada do i-ésimo elemento no canal
de atendimento, e (^) t (^) si - instante de saída do i-ésimo elemento do canal de
atendimento, o qual coincide, neste modelo, com a saída do sistema.
Observando-se o gráfico da Figura 2.3 vemos que, para descrever precisamente o que ocorre dentro do nosso sistema é necessário estabelecer uma disciplina para a forma de atendimento dentro do sistema. Se, como é o caso do gráfico da Figura 2.3, os elementos entram no canal de atendimento exatamente na ordem em que chegam ao sistema, então diz-se que essa fila, se ela existir, tem disciplina FIFO "First In First Out", primeiro a entrar na fila é o primeiro a sair da fila.
0
2
4
6
8
10
12
14
0 2 4 6 8 10 12 14 Tempo
Fluxo acumulado
Figura 2.4: Descrição gráfica de uma fila LIFO
Quando há mais de um canal de atendimento (e.g. nas caixas de um supermercado), é comum ocorrerem disciplinas aleatórias. Newell (82) as denominou SIRO "Service In Random Order" e apresenta como exemplo de transportes o fenômeno da fila em um ponto de ônibus, onde também não necessariamente entra primeiro no ônibus quem chegou primeiro no ponto. Como veremos adiante, a disciplina da fila pode não afetar a medida de mérito, dependendo do que se pretende medir.
t (^) a
chegada de um elemento entrada do elemento no canal de atendimento saída do elemento do canal de atendimento
t (^) b
Ts max
Tf max
N = 12 ∆t = 13 C(t) E(t) S(t) ∑Tf (^) k = 22,5, k=1.. ∑Ts (^) k = 34,6, k=1.. F ≅ 1, Tf ≅ 1, F (^) max = 4,0 T (^) fmax = 9, F (^) max = 4 A (^) max = 5,0 T (^) smax = 10,
ordem de atendimento
1
2
12
10
3
8
4
5
6
7
9
11
A (^) max = F (^) max + 1
Vemos também que é possível medir várias características do nosso sistema. Se estamos interessados em dimensionar a capacidade máxima de acúmulo do nosso tubo de bolinhas, então nos interessa medir a fila máxima no intervalo ∆t=tb - ta
da Figura 2.3 ou da Figura 2.4, que no caso é Fmax = 4 elementos. Se por outro lado a medida importante é o tempo máximo que um elemento permanece na fila, então nos interessa medir esse tempo, que é igual a T (^) f (^) max = max{t (^) ei−tci} = 3 , 5 unidades de
tempo no caso de disciplina FIFO e 9.5 unidade de tempo no caso de disciplina LIFO. Ou ainda, se a medida importante é o acúmulo máximo no sistema, mediremos Amax =5 elementos, ou o tempo máximo no sistema, então mediremos T (^) smax = max {t (^) si −tci} = 4 , 5 unidades de tempo no caso FIFO, e 10.5 unidades de
tempo no caso LIFO.
É muito comum entretanto, que estamos interessados em medir desempenhos médios do sistema durante um intervalo de tempo, ou seja, fila média, tempo médio de espera na fila, número médio de elementos no sistema, ou tempo médio de espera no sistema.
Voltemos à Figura 2.3. O objetivo é medir o desempenho médio da fila no intervalo t = t (^) b - ta
Nesse intervalo chegaram n elementos ao sistema. O (j+1)-ésimo elemento esperou Tf (^) j+1 = t (^) e (^) j+1 - tcj+1 na fila, ou seja os n elementos esperaram um tempo total
igual a
∑
++ =+
j 1 n tot (^) f (^) kj 1 fk
T T
(no exemplo das Figuras 2.3 e 2.4 admitiu-se j=0, ou seja, o sistema estava vazio quando se iniciou a observação).
Se dividirmos o tempo total de espera por n elementos teremos o tempo médio de espera na fila que denominaremos:
Verificaremos agora o que ocorre com as medidas de desempenho médias do sistema. O j+1 ésimo elemento ficou no sistema Ts (^) j+1 = t (^) s (^) j+1 - tcj+1 ,ou seja,os
elementos esperaram um tempo total igual a
∑
++ = =+
j 1 n Ttot (^) s (^) k j 1 Tsk
Por analogia temos:
T = s (^1) n ⋅Ttot f
e
A = (^) (t 1 - t ) T b a tot f
e portanto, λ ⋅ T = AS.
Os gráficos das Figuras 2.3 e 2.4 foram desenvolvidos de forma que se atenda um mesmo número n = 12 elementos no intervalo t (^) b - t (^) a = 13unidades de tempo, com um tempo de atendimento constante, igual a 1 unidade de tempo.
Se calcularmos numericamente as medidas de desempenho dessas duas filas (ver cálculo de Ttot (^) s , F e Tf nas Figuras), notamos que só diferem quanto ao tempo máximo de espera de um elemento na fila. Esse resultado não é um acaso, e é a razão porque, no caso mais complexo matematicamente de descrição de filas estocásticas, a literatura, apesar de citar as outras disciplinas, admite via de regra que o fenômeno real possa ser representado pela disciplina FIFO, em virtude da complexidade da solução matemática para as outras disciplinas.
Fluxo contínuo
Da mesma forma como para o caso de fluxo discreto, podemos imaginar um silo de grãos onde conhecemos a priori a lei de chegada de grãos pelo duto de entrada e a lei de consumo de grãos através do duto de saída. A Figura 2.5 representa esse caso:
Existem vários fenômenos de transporte onde essa aproximação por um contínuo é válida. Tomemos por exemplo o caso de chegadas de pessoas a uma plataforma de metrô. O número de pessoas que chegam durante períodos de pico é tão grande e o acúmulo na plataforma também, que variações decorrentes de um maior ou menor espaçamento entre dois elementos sucessivos (no caso pessoas), ou mesmo detalhes da disciplina da fila, têm efeito desprezível sobre as medidas de mérito que se busca normalmente nesse caso, ou seja, o número máximo de pessoas acumuladas na estação, ou o tempo máximo provável que uma pessoa espera na plataforma até conseguir embarcar no trem.
Veremos adiante que essa aproximação do fluxo de chegadas por um meio contínuo é adequada para um conjunto bastante grande de problemas de transporte, onde estamos interessados em medir eventos macroscopicamente durante picos de tráfego, ou quando a quantidade estocada deve ser normalmente grande, ou quando o número de canais de atendimento é grande.
Se descrevermos o que ocorre no nosso sistema com três seções de controle teremos, à semelhança do caso de eventos discretos, a medida de vazão de chegada no sistema c(t) na seção de controle 1, a medida de vazão de entrada no canal de atendimento e(t) na seção de controle 2 e a medida de vazão de saída do sistema s(t) na seção de controle 3, conforme mostrado na Figura 2.5. Como se pode perceber nessa representação por fluído, não estamos mais interessados na distribuição dos tempos entre chegadas sucessivas de elementos, mas sim na distribuição da vazão ao longo de um período de observação.
C(t)
0
20
40
60
80
100
120
140
160
180
200
220
240
260
280
300
0 20 40 60 80 100 120 Tempo (minutos)
Fluxo acumulado (passageiros)
Figura 2.6: Descrição gráfica de uma fila representada por um contínuo
A fila máxima é representada por
Fmax=max {C(t) - E(t)}
onde
= ∫
t 0
C( t) c(t)dt - fluxo acumulado de chegadas no sistema até o instante t.
ti tj
S(t)
E(t)
C(t)
tn = tm
X (^) n = X (^) m Tf max F (^) max
T (^) atd = 2 min
= t 0
= ∫
t 0
E( t) e(t)dt- fluxo acumulado de entradas no canal de atendimento até o
instante t. e T (^) f (^) max= C−^1 (xn)−E^ −^1 (xn), com xn = c(t (^) n )
onde tn é o instante em que ocorre Fmax.^3
Analogamente podemos calcular valores máximos no sistema
A max =max^ {C^ (t)−S(t)}
e T (^) s (^) max= C−^1 (xm)−S^ −^1 (xm), com xm = c(t (^) m)
onde t (^) m é o instante em que ocorre Amax.
Na maioria dos casos de aplicação, admite-se que o tempo de atendimento é constante e portanto as curvas E(t) e S(t) são paralelas na região de Fmax , Amax e xm = xn.
Como no caso de fluxo discreto, é possível que em certos casos seja de interesse calcular valores médios de desempenho em um intervalo ∆t = t - tb a. Neste caso teríamos para a fila:
tempo total de espera na fila =∫ [ − ]
b f a
t tot (^) t T C(t) E(t)dt
(^3) ver prova em Newell (1982), cap. 2
Essa constatação, apesar de trivial, é fonte de muitos erros, conduzindo em caso de equívoco do analista, a fila negativa, a qual não tem justificativa física. Em outras palavras, um elemento, pessoa ou objeto, não pode ser atendido na fila se ainda não entrou no sistema.
Em qualquer sistema de fila existe um princípio de conservação, ou seja, o que entra tem que sair e o que não entra não pode sair.
Esse alerta é importante, pois não é incomum o analista representar um fluxo de chegada em que notoriamente ocorre um pico de tráfego, como por exemplo no histograma de chegadas de veículos a um posto de pedágio no período de 150 minutos apresentado na Figura 2.7, por uma distribuição probabilística, em geral Poisson, de fluxo médio constante, igual à média do fluxo no período^4.
A utilização de um modelo "tradicional" da teoria das filas implica que os veículos no período de menor fluxo são atendidos antes que eles tenham entrado no sistema o que conduz obviamente a erro na medida de mérito, qualquer que seja a escolhida.
Após essa discussão conceitual sobre filas formadas exclusivamente porque durante um certo período de tempo o fluxo medio de chegada é maior que o fluxo de atendimento, introduziremos através do emprego do nosso modelo analógico de fluxo discreto, o conceito tradicional da teoria das filas, de filas formadas exclusivamente devido a variações estocásticas das chegadas e do atendimento no entorno de um valor médio constante.
(^4) ver Ashford et alii (1976) para um exemplo de aplicação equivocada do modelo de fluxo estacionário a um caso de fluxo médio variável. observações/10 minutos^2
freqüência acumulada de observações
Figura 2.7: Histograma de um processo de chegadas onde ocorre um pico de tráfego
2.1.2 A Fila Estocástica
No conceito tradicional apresentado na literatura sobre "teoria das filas" parte-se das seguintes hipóteses críticas:
- as medidas de mérito da fila ocorrem no intervalo de tempo ∆t → ∞.
- as chegadas são regidas por um processo aleatório com distribuição de probabilidade conhecida (é comum admitir-se que as chegadas seguem uma distribuição de Poisson) de média constante no intervalo de tempo considerado.
0
200
400
600
800
1000
1200
1400
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 Tempo (minutos)
Fluxo acumulado de veículos
0
20
40
60
80
100
120
140
160
180
200
Fluxo observado de veículos
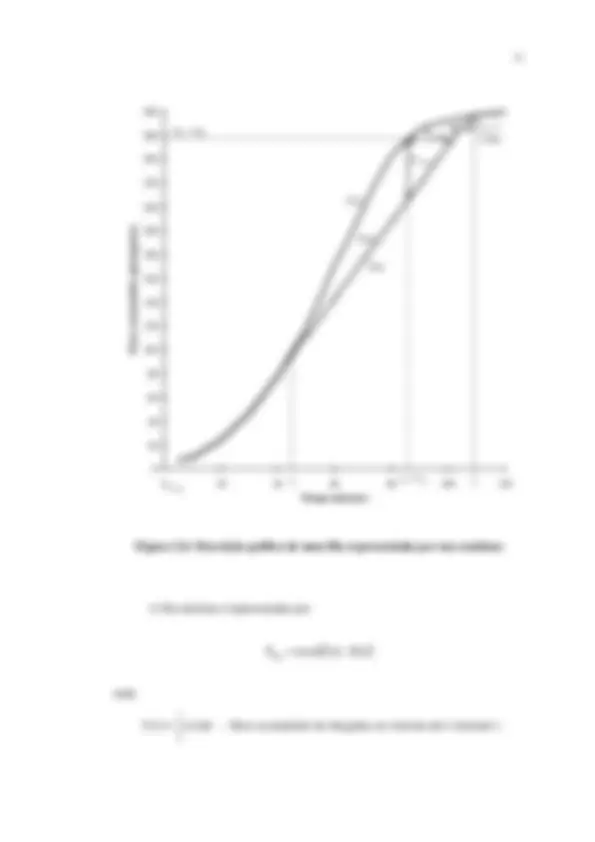
- da ajustagem de uma reta através das observações de intervalos entre chegadas sucessivas (λ = cte) através da técnica de mínimos quadrados resulta o valor λ aproximadamente igual a 1 (0,96);
- da ajustagem de uma reta através das observações de instantes de início de atendimento resulta um valor de μ aproximadamente igual a 1.1 (1.06);
- as retas E(t) e S(t) são praticamente paralelas (o não paralelismo deve-se ao comprimento do período de simulação << ∞ ) e o intervalo entre elas
corresponde a Ta = 1 / μ.
- as oscilações em torno da média, neste caso de um único canal de atendimento em que o índice de congestionamento ρ ≅ 1,0, são relativamente grandes. Mesmo assim, nota-se que para um intervalo de tempo de 50 atendimentos, ou seja, aproximadamente 50×Ta ,a fila máxima, apesar de relativamente grande em alguns períodos, é finita.
Figura 2.8: Representação gráfica de uma fila estocástica
0
10
20
30
40
50
0 10 20 30 40 50 60 Tempo
Fluxo acumulado
Chegada ao sistemaInício do atendimentoFim do atendimento
Não é objeto deste texto reproduzir o desenvolvimento teórico dos modelos analíticos de filas estocásticas, assunto este muito bem apresentado em vários textos clássicos sobre o assunto^6 , mas apresentamos a seguir as formulações das principais medidas de mérito, para efeito de comparação dos resultados teoricamente esperados com os resultados obtidos da nossa simulação gráfica.
probabilidade de zero elementos no sistema Po= 1 - ρ
probabilidade de n elementos no sistema
Pn = ( 1 −ρ) ×ρn
numero médio de elementos no sistema
A =(1-ρ) ρ
numero médio de elementos na fila
F=(1- )
2 ρ
ρ
e lembrando que F = λ×Tf e A = λ×Ts,
tempo médio de espera no sistema
((1- ) ) Ts =^1 ρ×μ
tempo médio de espera na fila
Tf = ((1-ρ)×μ) ρ
Nota-se dessas formulações que o tempo de espera tende a infinito quando ρ tende a 1, o que não se confirma na nossa simulação com período finito.
(^6) ver por exemplo Novaes(1975) cap 5 ou Hillier e Lieberman(1988) cap 10.