



Robótica
Cinemática Direta (Parte 2)
1





Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
continuação da aula 3 para aperfeiçoamento da robótica.
Tipologia: Esquemas
1 / 18

Esta página não é visível na pré-visualização
Não perca as partes importantes!
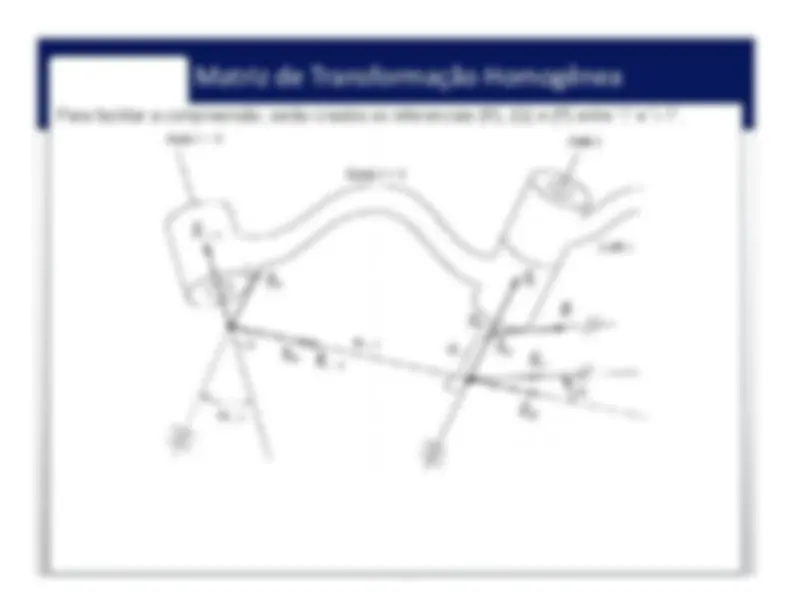
Para facilitar a compreensão, serão criados os referenciais {R}, {Q} e {P} entre “i” e “i-1”.
Relação entre referenciais:
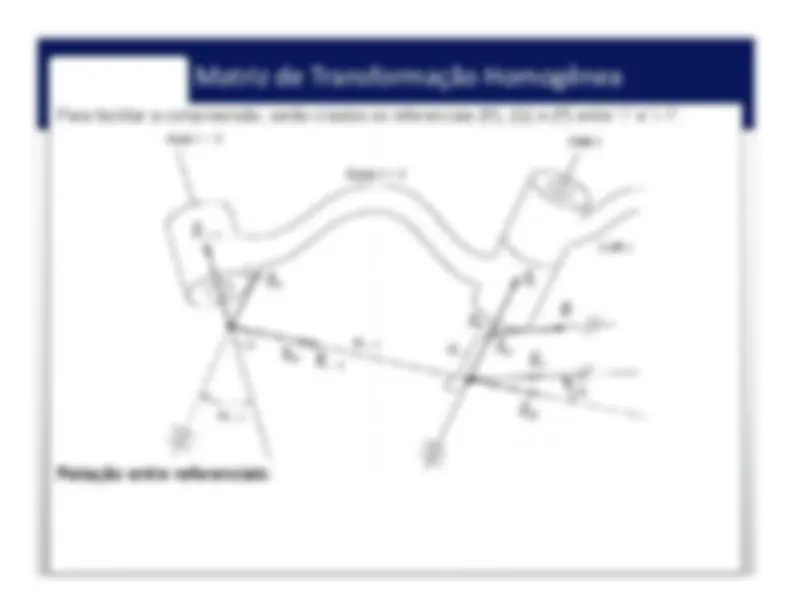
Para facilitar a compreensão, serão criados os referenciais {R}, {Q} e {P} entre “i” e “i-1”.
Relação entre referenciais:
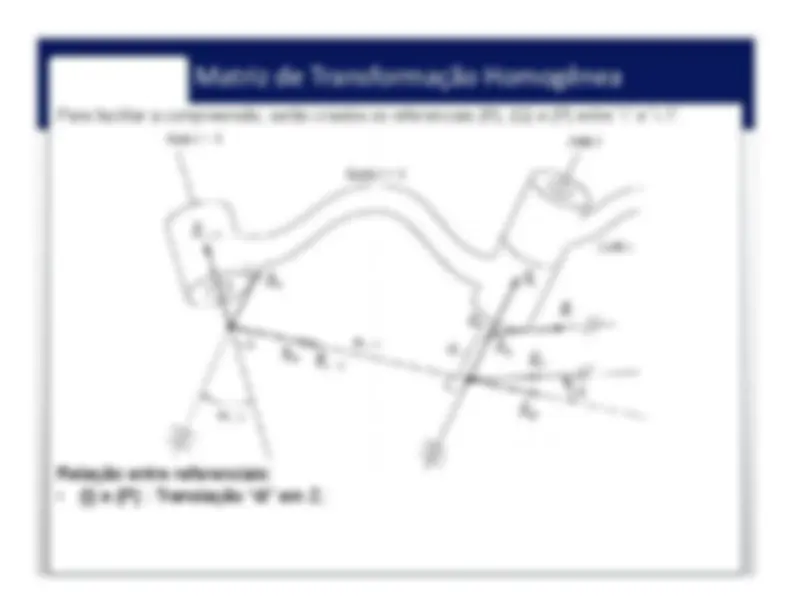
Para facilitar a compreensão, serão criados os referenciais {R}, {Q} e {P} entre “i” e “i-1”.
Relação entre referenciais:
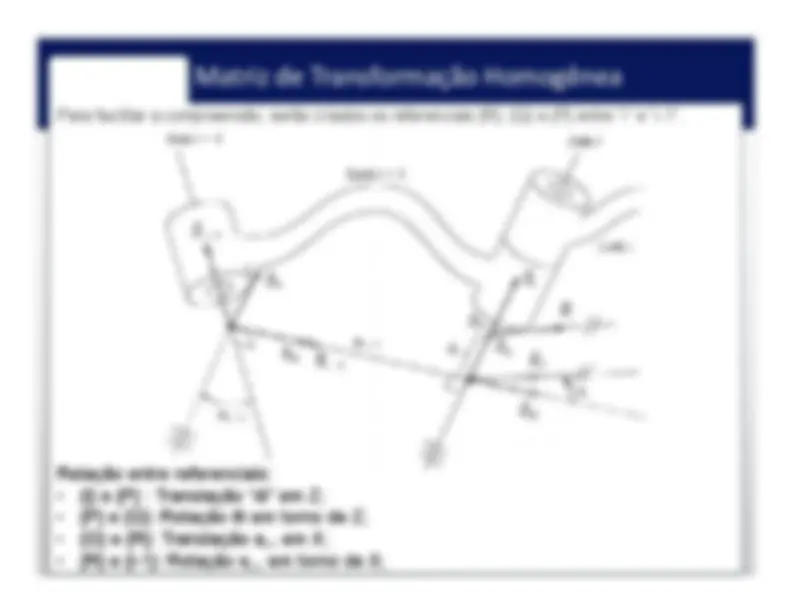
Para facilitar a compreensão, serão criados os referenciais {R}, {Q} e {P} entre “i” e “i-1”.
Relação entre referenciais:
72
Onde: c =Cosseno e s=Seno
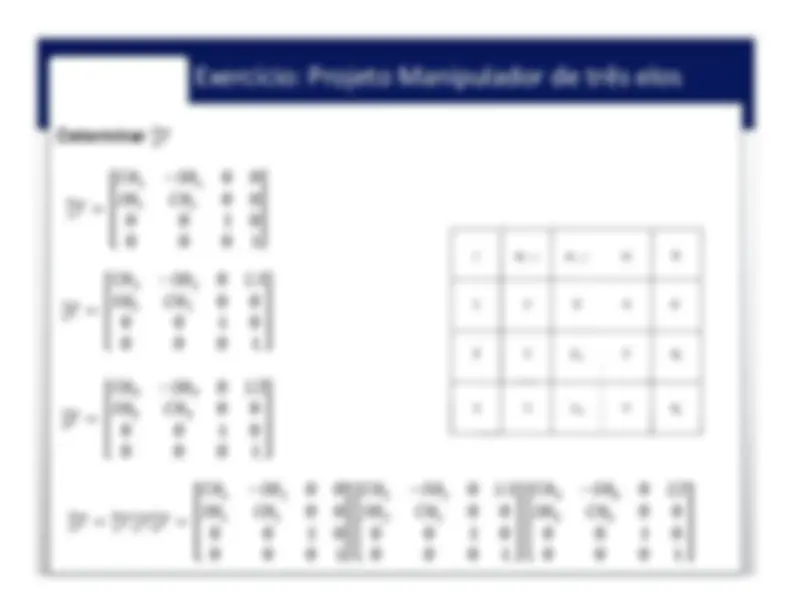
Ex: Determinar (^) ���
77
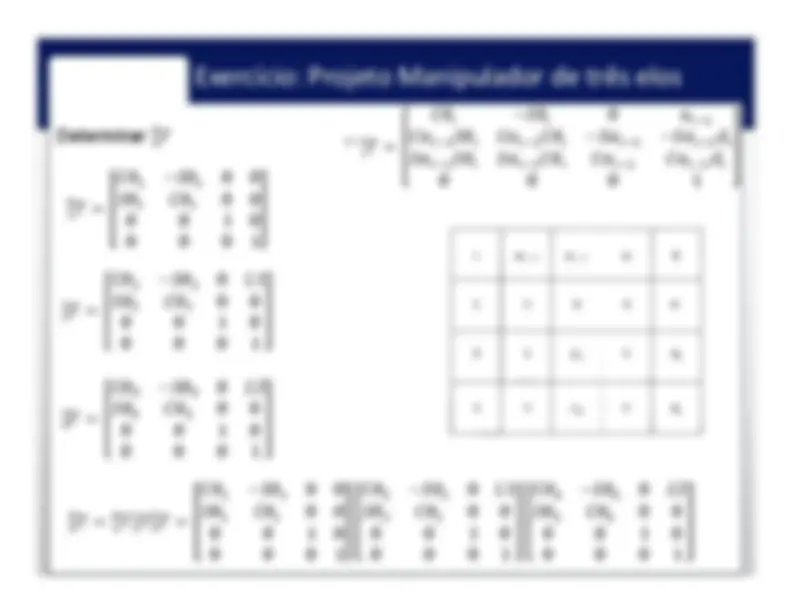
Determinar (^) ���
Determinar (^) ���
��� =
��� (��� ��� − ��� ��� ) −��� (��� ��� + ��� ��� ) −��� (��� ��� − ��� ��� ) −��� (��� ��� + ��� ��� ) 0 ��� �1 + �2(��� ��� − ��� ��� ) ��� (��� ��� + ��� ��� ) + ��� (��� ��� − ��� ��� ) −��� (��� ��� + ��� ��� ) + ��� (−��� ��� + ��� ��� ) 0 ��� �1 + �2(��� ��� − ��� ��� ) 0 0 1 0 0 0 0 1
��� =
���(�� + �� + �� ) −���(�� + �� + �� ) 0 �1(���(�� )) + �2(���(�� + �� )) ���(�� + �� + �� ) ���(�� + �� + �� ) 0 �1(���(�� )) + �2(���(�� + �� )) 0 0 1 0 0 0 0 1
Ex: Determinar (^) ���
��� =
���(�� + �� + �� ) −���(�� + �� + �� ) 0 �1(���(�� )) + �2(���(�� + �� )) ���(�� + �� + �� ) ���(�� + �� + �� ) 0 �1(���(�� )) + �2(���(�� + �� )) 0 0 1 0 0 0 0 1