Pré-visualização parcial do texto
Baixe Elektor 24 e outras Notas de estudo em PDF para Mecatrônica, somente na Docsity!
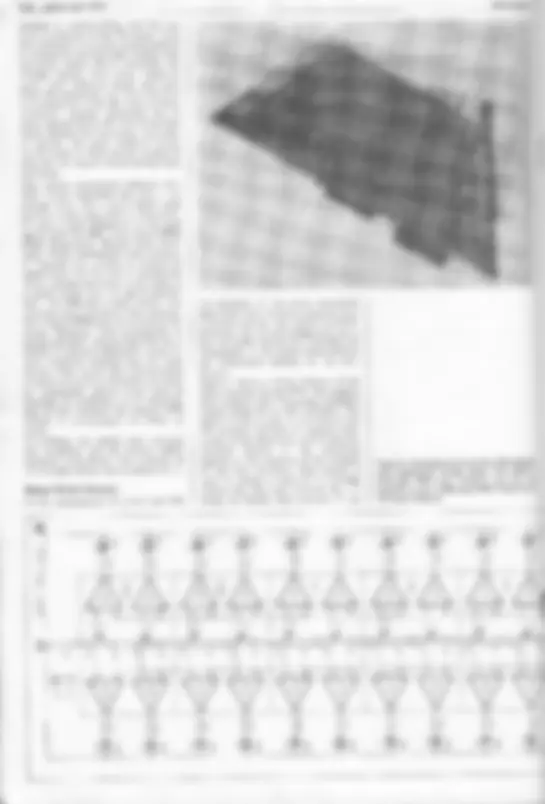
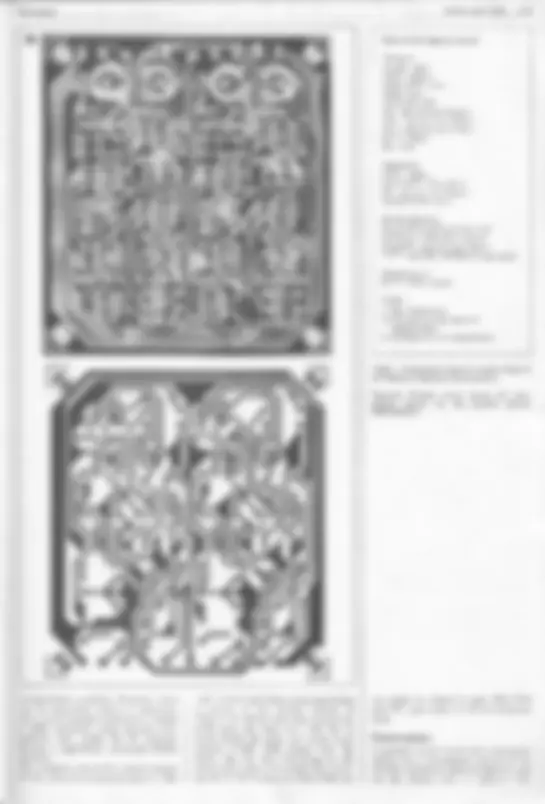
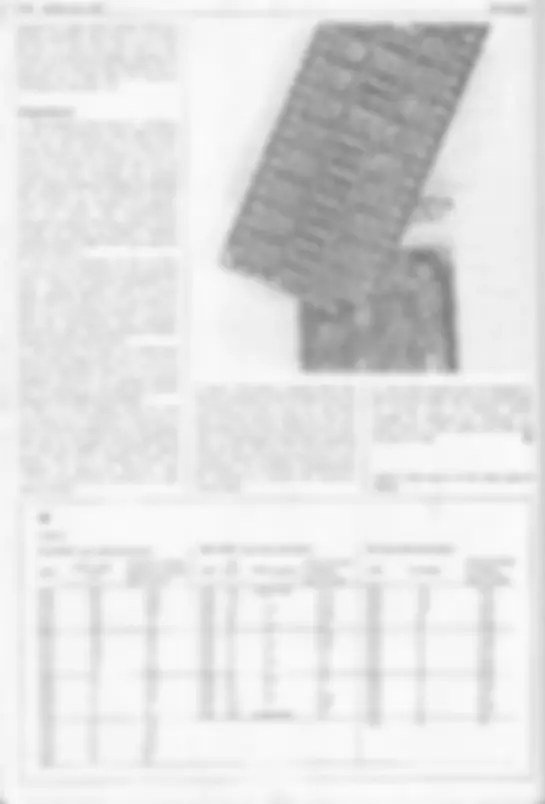
ELEMTOR DEGODEr Editor W van der Horst Doputy editor: P. Holmes. Technical editors : J. Barendreche GH. Dam E, Krempolsauer GH, Nachbar Fr. Soheel KSM. Walraven Arteditor : C.Sinke Subscriptions: Mes. A. van Moyal Ae E a ea, Sem Ci, Se e iu a 3 15 ca a om Me se Decen 877 1200 (tas ma Ari par pas E Enceio Sd Ee di Eos pon aaade qm oi pr PR Copy 1877 Elos pr Lt — Cont BIO 8.3) tt ES E ft fFormant= the elelktor synihesizer (1 Model car race tracks have been popular for many years. However, all of the commercially available tracks have the disad- vantage that the car is guided by a pin which engages in the slotted track, and the 'driver' controls only the speed of the vehicle, In the Elektor race track the cats are freed from this restraint and both speed and steering are remotely controlled using an infra-red link. The proportional control system used can easily be extended and used in a radio control system for other models, as will be described in a future article, dutrsasa tato terminado, indopendeat “of the car patio or ho detida wc a Te tack cas be sado by gvcig ao nd ac lo dn she torto de the photodio Once iceçe is roque, The Track alta ota a poe li amb at tip mater te pio St ea io Ela diode,shon ja Eur, ducnde native mal sx of m dns vie si That lhe same pole metades 6. 1º e mol pese to | alvayo sppeme at he 4 ani - uia | aquigpsd wa a mlaames eve. pia slotless model car track (1) elektor april 1977 — 4.19 E E “a “a RR Figure 6. Showing the principle of “digi- proportional” servo control. Figure 7a. Circuit of the infra-red transmitter. Figure 7b. An array of infra-red LEDs mounted in a reflector housing. Figure 8. Circuit of the infra-red receiver. Figure 9. Block diagram of the complete infra-red control system. ng o2 Ron Ow sv eis soomm MPX 10n ici cs im mp À sogp - ho JE o E EUER en colr* US as) Ton na dna * Tantalum ÇA 4-20 — elektor april 1977 morse decoder with ddil (2) morse decoder with doll (2) E.H. Leefsma The first part of this article dealt with the general operating principles of the morse decoder. In this part the complete circuit is considered in detail, together with some methods of displaying the decoded message. 1 master ces ER ER ah So. 2 Clear result “Clear Sigrial Clear S, a Clear Bo do Bo o FFS FF6 of FF7 ab, FF8 Meroes ajê, rálcos Elcio Iciocs ae o E E a [E [Be + + & RE E 5v(s e E 1 Em - ERES É ale a Am, S 1c21 DuG a ds 74424 do Ba 5 p= rola 8s 3| [E Ê Ex Elie e Em RAE ES e FE dE E Tl] mo z É ou og ê Als VA x a dá al $ “O At the end of last month's discussion the general principles of the decoder had been established, terminating with a description of the operating sequence on receipt of a morse message, which is controlled by the status register and decoder. Practical circuit Figure 1 shows the circuit diagram of | the status decoder. The register proper consists of four D-flipflops (FFS...FF8), in which So, comparator result, signal level, and S, are stored (So and S; are the “previous status” bits) The outputs of the flipflops are connected to a decimal decoder which supplies the eight drive signals via a diode matrix. Some outputs are active low, i.e. when. the output is “0”, hence there is no “bar” over these functions. The matrix diodes must be of the germanium type because the threshold voltage of silicon types is too high reliably to pull down a TTL input to a “O level. The IDLE-LED lights up when the decoder is idle (status condition A), and the MARK-LED lights up when the level of the input signal is “1º. The small loudspeaker is driven by gated bursts of clock signal and makes the input signal audible in the form of an audio tone. The drive signals obtained are used for the dot/dash/space duration logic and to feed the results into the shift register. Because all this cannot take place simultaneously, the clock pulse generator, as mentioned earlier, is four phase (see fig. 2) and each output gives aclock pulse in turn. When the apparatus is switched on a “master clear pulse” is given, so that all important initial logic states are fixed and the decoder will always start from the idle position. To ensure reliable functioning of the morse decoder, the input signal applied to the input of the status register must be free from interference. This is achieved by means of the suppressor cir- cuit in the morse decoder (see figure 3). This circuit consists of a shift register | and a flipflop (ICO and FF7); the flip- flop (FF7) forming part of the status register. At each clock pulse (T3) the level of the (digital!) input signal is moved along the shift register. The outputs of this shift register (pins 12...15) and the original input signal are fed to a binary adder (IC22) which in turn stores the most often occuring level in the status flipflop. Its output is connected to the adder, so that in fact there are six different versions of the input signal. If the majority of them are “1º, the output is “1º; if there are as many “O's as “1ºs, the (status) result remains unchanged. Figure 4 shows the complete circuit diagram of the morse decoder. A large part of it is occupied by the dot/dash/ space duration logic. The x2 multiplication of counter | indi- cated in the block diagram is obtained by applying the bits of this counter (IC19 and IC20) to the selector input (ICI5 and IC16) shifted one position further. The x2/3 multiplication is 4-22 — elektor april 1977 morse decoder with ddil (2) a Aovau viva st data migis send datar fosg gate s NH... NG=1C1=7404 N7.. NTO, NI. NS» 102, 1C3 = 207402 = 7800 N26 = CB 7420 FPIS .PPIG,FFIT . FF2O- ICH ICI2= 207475 PES + FEG, FE) + FF6,FF9 + FFIO, FIT + FFIZ= 1025, 1C26, 27, 1C28 = axa7a 1Ca = 74156 IC13,IC14, 19, 1C20 - An7aB3A ICIS, IC16= 2x74157 1G17. ICT = 257485 1621 = 745, rc2a - 7483a VÉIO, 1622, 1C24 = 3x74t195 morse decoder with ddil (2) elektor april 1977 — 4-23 LE Pulse SE DATA Morse Receiver shaper Decoder Display EEE Figure 4. Complete circuit of the morse decoder. The circuit uses 28 TTL ICs. 7 Figure 5. Example of a receiving chain of which the morse decoder forms part. Re Figure 6. This circuit can be used to convert aa po — E E EE | E the tones received into pulses, Ren ERES! ERR | Ee] Figure 7. Modified alphabet for use with A B c D E F G H ' 3 seven-segment displays. The text becomes quite legible after some practice. eo — e tum RR E 2 E 1— End of message [o conoiminço morse decoder with ddil (2) elektor april 1977 — 4-25 09 8V come EA O sv 29 Es PTI o O q || tg Es Val HM ERR] Pe e a] 7475 Es 7475 Edna po so E E - - a E Hs EH 5 | ES sh E Pre PT? al 1875 1475 o spo uma rr mm EH À “aa em Es “ma =, OE Ah FS SU n] PP? 7475 Es] CET = + Em E a A! by means of two diode matrices. The first matrix has 7 inputs and 41 outputs, the second has 41 inputs and 7 outputs. Figure 8 shows the converter. Tables 1 and 2 show where the diode connec- tions must be made. For example: Tf a letter A is read out at the output of the decoder, the output code is as follows: Q8 Q7 Q6 Q5 Q4 Q3 Q2 Q1 1 1 1 1 Ts OaR TO To tum on the “Aº transistor all 'Q's, which are “1º and all “Q's' which are “1” are connected to its base via diodes. The following diode connections are thus made in the first matrix: O Q2 03 Q4 Q5 Q6 Q7 Figure 8. Two diode matrices convert the code at the output of the morse decoder into a letter code for the seven-segment displays. Figure 9. Circuit diagram of a running-seript display. Only if letter A is received, will the base of the first transistor be positive. In the second matrix the connections must now be made which ensure that the right segments of the displays light up; in this case all segments except “f” (Table 2). On the output of the last matrix the information is now available to drive a display. In practice a read-out with only one display will not be very intelligible. Therefore figure 9 gives a method of extending the read-out with several displays. The letter received is made visible on the first display, and during the data-ready pulse the data is stored in the first memory, so that the letter appears on the second display. The 4-28 — elektor april 1977 morse decoder with ddil (: 12 EXT. re REED gears A a e e É | q 0) - b INPUT output] 9759-12 Figure 12. External connections to the board. Figure 13. Suggested power supply. It can be mounted on the TV tenis S-volt supply board (EPS 92188). Table 3. The ASCII code (American Standard] Code for Information Interchange). SER digisplay on board 1º [ELEKTOR digisplay on board elektor april 1977 — 4-31 Note that the regulator IC (IC9) should 3 DIA be provided with an adequate heat-sink. (O e There is sufficient room on the board for this. The complete circuit of the Digisplay is shown in figure 4; however, we will not annoy our regular readers by repeating the article as originally pub- lished last May ..... For our not-so-regular readers, we can sum it up very briefly as follows. The Digisplay tests the states of sixteen binary signals and displays the results on an oscilloscope screen in the par- ticularly convenient form of a four-by- four matrix of “O” and “1º characters. It may be used to test digital integrated circuits; to display logic states in the form of Karnaugh maps; as a pro- grammed 16-bit pulse generator. A fixed-frequency clock generator is incorporated in the circuit, and an external clock input is also provided. For testing digital ICs and for Karnaugh mapping, the “X' and “Y outputs are connected to the Horizontal (X) and Vertical (Y) inputs of an oscilloscope. The test inputs “1º to “16º are connected to the relevant points in the circuit under test and the unit is switched to the internal clock generator. For Karnaugh mapping, the BCD code corresponding to each position of the display matrix is available at the A, B, C and D outputs. The serial in- and outputs (*S') are required when the unit isused as a programmed pulse generator. 5W/160mA 2xDUS BS 23] cal call cs cs e so fon Tzu ini IC6=7493 ali 107=7493 E "Josy lr a É am RR ER 9 ES o EO RR o peso, o ? wet q É ar 1H 2 ai AA Es leserarso Rs: BOSIDovInn Aun SRI Go 0Naa NINZ,N3,N4 nero PE N7,N8,N9 =IC3 TRES, e NI0,N71,N12,N13 = IC4 15 N14,N15,N16,N17,N18,N19 = ICS eisf j e 4-32 — elektor april 1977 led vu/ppm led vu/ppm VU (Volume Unit) meters and PPMs (Peak Programme Meters) are used widely in the recording industry and by the amateur to monitor audio signal levels. Meters using conventional moving coil indicators have, however, several disadvantages. The ballistics of the meter movement are quite critical, which makes the meters expensive. They are also relatively bulky, which means that in a multichannel recording system the meters occupy a great deal of space and are difficult to read simultaneously. Recording studios are increasingly turn- ing to instruments in which the moving pointer is replaced by a column of LEDs that indicate the signal level. These have the advantage of occupying very little panel width. The characteristics of the meter are determined purely by the electronic circuitry, so a VU or PPM type of response can be achieved with very little modification. The design given in this article is for a two-channel meter, but this can easily be duplicated to give any desired number of channels. To avoid the possibility of letters and telephone calls from irate recording engineers and enthusiasts, it should be stated at the outset that, although the meters described in this article will be referred to as “VU” or 'PPMº, these terms are used somewhat loosely to describe the type of response of the instruments. The meters do not and cannot conform to either VU nor BBC or IEC PPM standards since, among other things, the size, scale arc, scale markings and colour of the meter scale are specified. These specifications clearly cannot be duplicated by LED indicators. Why and Wherefore? Before looking at the details of the design it may be instructive, especially for the less experienced reader, to look at the why's and wherefores of signal level meters. In a perfect world signal a | Fa Entt: CR í (= level meters would be superfluoús for | many applications. Sound from any source could be recorded on to tape or disc with no reference to the signal level. The only adjustment necessary would occur during playback, when the volume control of our (perfect) ampli fier would be adjusted to give a sound level acceptable to our ears. Regrettably the real world is very imperfect. To begin with, the lowest signal level that can usefully be recorded is determined by the noise generated by the recording and/or transmitting medium itself in the absence of a signal. In the case of disc this is caused by the surface texture of the disc material, in the case of tape, by random orientation of the magnetic domains. At the other extreme, the maximum signal level is determined for tape by the level at which the tape “saturates”, i.e. when the signal level versus magnetisation graph becomes non-linear, thus distorting the signal. In the case of disc the upper limit is determined by the tracking ability of the cartridge and, to a lesser extent, that of the cutting lathe. The electronic circuits used to process | the signal also have upper and lower signal limits due to noise on the one hand and distortion due to clipping on the other. In a recording/reproducing situation however, the limits imposed | by the recording medium are much narrower than those imposed by the electronics. This brings us to the concept of dynamic range, which is simply the ratio between the highest usable signal level and the lowest. This may be expressed as a ratio, e.g. 1000:1, but is more usually expressed in dB (decibels). There is nothing mystical or magical about the use of decibels, a voltage ratio expressed in dB is simply 201og1 Vi/Va. Thus the dynamic range of 1000:1 expressed in dB would be 20 log 1000. Log 1000 = 3 so the dynamic range = 60 dB. It is most important to note that this tells nothing about the magnitude of the quantities involved, merely their ratio. If some absolute quantity such as a voltage is to be ex- pressed in dB then a reference voltage must first be chosen against which to express it. Thus, for example, the mains voltage (250 V) could be quoted as 60 dB (reference O dB = 250 mV). There are many reasons for using dB rather than simple ratios. Firstly, human sense organs tend to respond to stimuli in a logarithmic fashion, so if electronic instruments such as signal level meters are scaled in dB then their response will be similar to that of the human ear (disregarding frequency response). Secondly, when dealing with dynamic ranges of many thousands of times, it would be impossible to construct an instrument with a linear scale that could read both the lowest and highest signal levels without changing ranges. Thirdly, since ratios expressed in dB are simply logarithms, to express the product of several quantities such as the overall gain of, a number of amplifiers and/or