Desenvolvimento da Rede - Treinamento 1
ÍNDICEÍNDICE
ÍNDICEÍNDICE
ÍNDICE
INTRODUÇÃOINTRODUÇÃO
INTRODUÇÃOINTRODUÇÃO
INTRODUÇÃO........................................................................................................................................................................................................................
........................................................................................................................................................................................................................
............................................................................................................ 0606
0606
06
ESTRUTURA BUS-CANESTRUTURA BUS-CAN
ESTRUTURA BUS-CANESTRUTURA BUS-CAN
ESTRUTURA BUS-CAN............................................................................................................................................................................................
............................................................................................................................................................................................
.............................................................................................. 0707
0707
07
- Função da estrutura ............................................................................................................07
- Bus-CAN nos veículos TG...................................................................................................08
- Mensagem CAN..................................................................................................................09
- Extensão de uma mensagem .............................................................................................. 09
- Princípio multimaster ...........................................................................................................10
- Prioridades de transmissão ................................................................................................. 12
- Iniciativa do emissor ............................................................................................................13
- Formato de mensagen na rede CAN ....................................................................................14
- Pesquisa de avarias na rede de dados ................................................................................. 15
REDE LIN-BUS (LOCAL INTERCONECT NETWORK-BUS)REDE LIN-BUS (LOCAL INTERCONECT NETWORK-BUS)
REDE LIN-BUS (LOCAL INTERCONECT NETWORK-BUS)REDE LIN-BUS (LOCAL INTERCONECT NETWORK-BUS)
REDE LIN-BUS (LOCAL INTERCONECT NETWORK-BUS) ......................................................................................
......................................................................................
........................................... 1616
1616
16
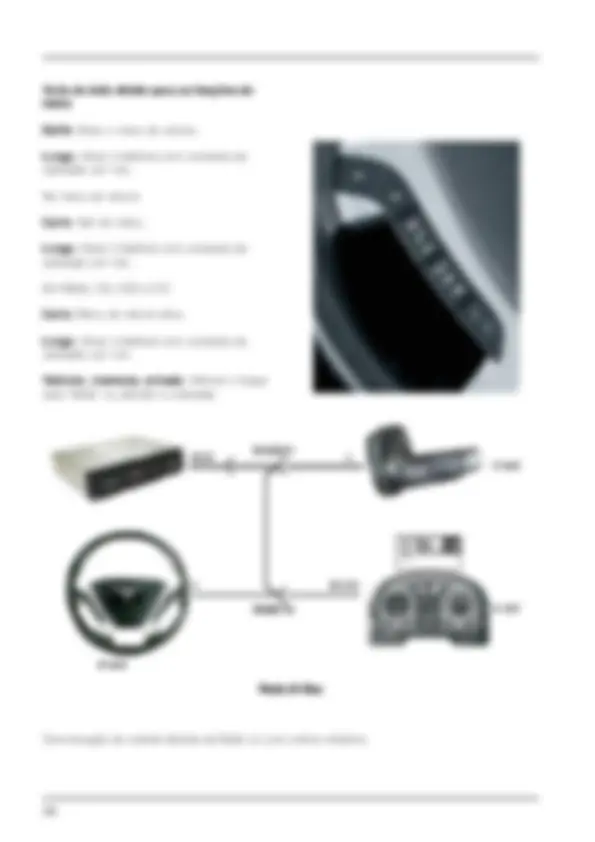
- Formato de mensagem na rede LIN-Bus .............................................................................17
LINHA KWP KEY WORD - PROTOCOLO DE DIAGNÓSTICOLINHA KWP KEY WORD - PROTOCOLO DE DIAGNÓSTICO
LINHA KWP KEY WORD - PROTOCOLO DE DIAGNÓSTICOLINHA KWP KEY WORD - PROTOCOLO DE DIAGNÓSTICO
LINHA KWP KEY WORD - PROTOCOLO DE DIAGNÓSTICO ..............................................................................
..............................................................................
....................................... 1818
1818
18
- Atribuição dos pinos do conector OBD ( On Board Diagnostic - Versão atual)......................18
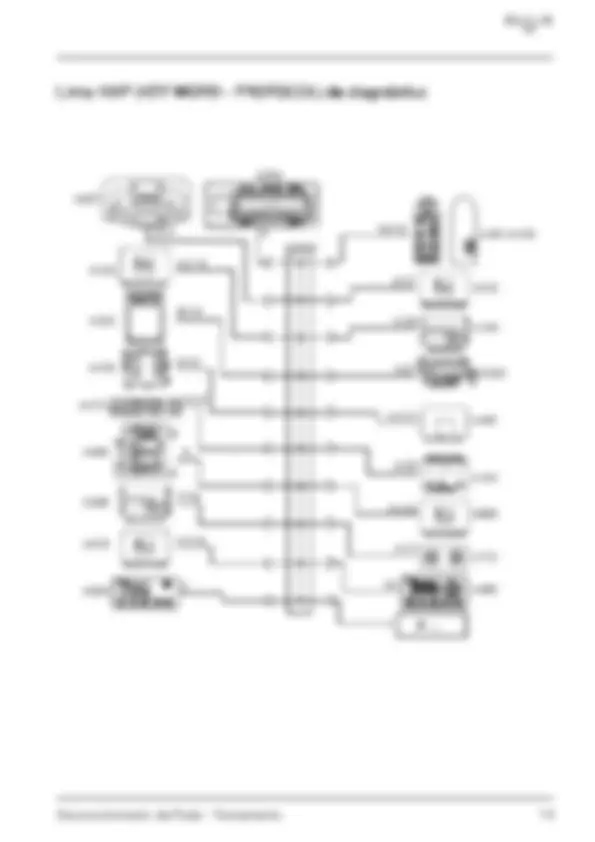
- Linha KWP (KEY WORD PROTOCOL) de diagnóstico .........................................................19
- Legenda dos módulos ........................................................................................................20
- LInha CAN - Modelo TGX com equipamento básico e Euro 4 ...............................................21
COMPUTCOMPUT
COMPUTCOMPUT
COMPUTADOR DE GESTADOR DE GEST
ADOR DE GESTADOR DE GEST
ADOR DE GESTÃO DO VEÍCULOÃO DO VEÍCULO
ÃO DO VEÍCULOÃO DO VEÍCULO
ÃO DO VEÍCULO ....................................................................................................................................
....................................................................................................................................
.................................................................. 2222
2222
22
- Módulo FFR (A403) .............................................................................................................22
- Legenda.............................................................................................................................. 22
- Identificação dos conectores e pinos (Módulo FFR - A403)..................................................25
- Alimentação e sinais ............................................................................................................25