Baixe Hidráulica e Pneumática e outras Notas de estudo em PDF para Pneumática, somente na Docsity!
UNIVERSIDADE FEDERAL DE SANTA CATARINA CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA MECÂNICA LABORATÓRIO DE SISTEMAS HIDRÁULICOS E PNEUMÁTICOS
Campus Universitário - Cx. P. 476 - CEP 88040-900 - Florianópolis - S.C. - Brasil Fone: (48) 3721 9396 - Fax: (48) 3721 7615 - e-mail: [email protected] - http://www.laship.ufsc.br
Sistemas Hidráulicos e Pneumáticos para Automação e Controle
PARTE II - Sistemas Pneumáticos para Automação
Prof. Victor Juliano De Negri, Dr. Eng.
Florianópolis, Março de 2001
Escritório de Direitos Autorais – N° registro: 328.561 – Livro: 602 – Folha: 221 – Obra não publicada .
Parte II - Sistemas Pneumáticos para Automação – LASHIP/EMC/UFSC ii
- 1 Introdução Índice
- 2 Fontes de Ar Comprimido e Sistemas Pneumáticos
- 3 Sistemas de Atuação Pneumáticos
- 3.1 Cilindros de simples ação com válvulas direcionais
- 3.1.1 Componentes pneumáticos
- 3.2 Cilindros de dupla ação com válvulas direcionais.................................................................
- 3.2.1 Componentes pneumáticos
- 3.2.2 Controle de velocidade
- 4 Estrutura Global dos Sistemas Pneumáticos
- 5 Modelagem e Dimensionamento Estático dos Circuitos de Atuação
- 5.1 Introdução...................................................................................................................................
- 5.2 Escoamento Compressível em Válvulas Pneumáticas
- 5.2.1 Propagação de uma Onda Acústica
- 5.2.2 Propriedades de Estagnação
- 5.2.3 Escoamento em Regime Permanente de Gases Ideais
- 5.2.4 Vazão em Bocais, Orifícios e Válvulas
- 5.3 Embasamento para o Dimensionamento de Válvulas
- 5.4 Normas para determinação da vazão em válvulas pneumáticas..........................................
- 5.4.1 Norma VDI
- 5.4.2 Norma ISO
- 5.4.3 Norma ANSI/(NFPA) T3.21.3
- 5.4.4 Correlação entre normas
- 5.5 Método de Seleção do Conjunto Válvula Direcional e Cilindro empregando a ISO
- 6 Projeto do Sistema de Processamento de Informações.............................................................
- 6.1 Introdução: Métodos de projeto
- 6.2 Método intuitivo para pneumática pura e eletropneumática.................................................
- 6.2.1 Pneumática pura...................................................................................................................
- 6.2.2 Eletropneumática
- 6.3 Métodos cascata e seqüência mínima.....................................................................................
- 6.3.1 Método cascata para pneumática pura
- 6.3.2 Método seqüência mínima para eletropneumática
- 6.4 Programação Convencional de CLP’s
- sequencia máxima) 6.5 Método passo-a-passo generalizado (inclui passo-a-passo da pneumática pura e
- 6.5.1 Princípios para construção do diagrama funcional
- 6.5.2 Solução empregando pneumática pura (Passo-a-passo da pneumática pura)
- 6.5.3 Solução empregando eletropneumática (Seqüência Máxima)
- 6.5.4 Solução empregando CLP
- 6.6 Exemplo de projeto do sistema de processamento de informação
PARTE II – SISTEMAS PNEUMÁTICOS PARA AUTOMAÇÃO
1 Introdução
Conforme estabelecido na ISO 5598 – Sistemas e Componentes Hidráulicos e Pneumáticos – Terminologia, a pneumática refere-se a ciência e tecnologia que trata do uso do ar ou gases neutros como meio de transmissão de potência.
Dentro deste contexto, pode-se identificar dois domínios tecnológicos distintos. O primeiro refere-se a produção, condicionamento e distribuição do ar comprimido, compreendendo o estudo de processos de compressão, filtragem e secagem, assim como o desenvolvimento tecnológico e dimensionamento dos componentes para realizar estas funções.
Alimentados pela fonte de ar comprimido estão os circuitos pneumáticos, que incluem válvulas e cilindros interligados através de tubulações, tendo como objetivo a conversão, de forma controlada, da energia pneumática em energia mecânica de translação ou de rotação. O circuito pneumático é entendido como parte de um sistema pneumático o qual engloba também os sensores, controladores, circuitos elétricos e demais componentes que viabilizam a automação ou controle de um processo.
A pneumática vem ampliando cada vez mais sua presença na indústria em face da capacidade de realizar ações rápidas e de forma segura, principalmente quando se trata de servir como atuação mecânica em equipamentos com ciclos operacionais complexos.
2 Fontes de Ar Comprimido e Sistemas Pneumáticos
Os circuitos pneumáticos presentes em máquinas industriais, veículos, consultórios ondotológicos etc. necessitam de uma fonte de ar comprimido com pressão constante e com capacidade de fornecer a vazão consumida pelos componentes do circuito. Esta fonte inclui unidade de produção , distribuição e condicionamento de ar comprimido conforme ilustrado na figura 2.1.
Figura 2.1 – Fonte de ar comprimido incluindo: Produção, distribuição e condicionamento (PINCHES & CALLEAR, 1996).
A unidade de produção inclui tipicamente os seguintes elementos:
- Compressor com filtro de admissão e, para compressores de dois estágios, de um resfriador intermediário;
- Resfriador posterior;
- Separador de condensado;
- Reservatório com válvula de segurança;
- Secador.
A figura 2.2 exemplifica separadamente uma unidade de produção.
c)
a) b)
d)
e)
V V1.1 V1.
S1 S
A1 A
V V1.1 V1.
V1.1 V1.
S1 S
A
V V1.1 V1.
S1 V1.
S2 V1.
org S sai V1. org S sai V1.
A
S1 S 1 2
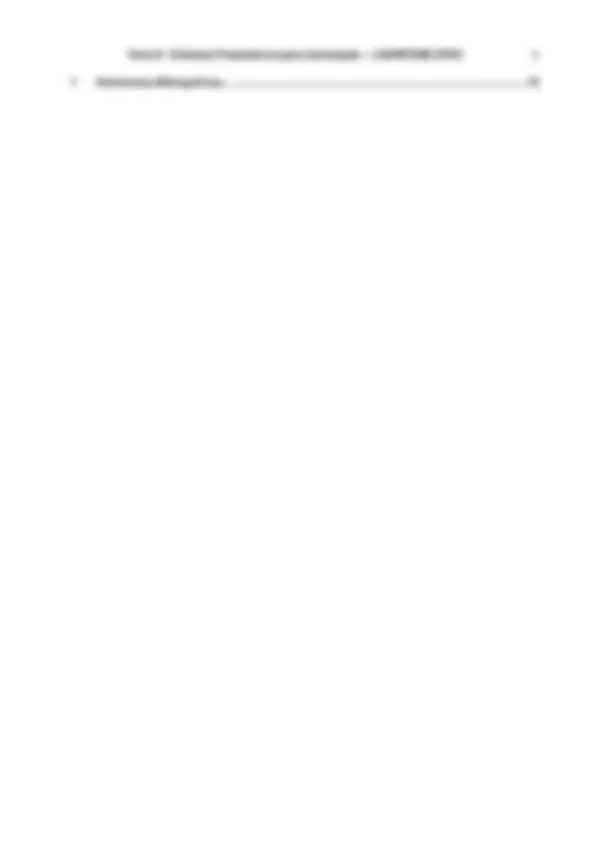
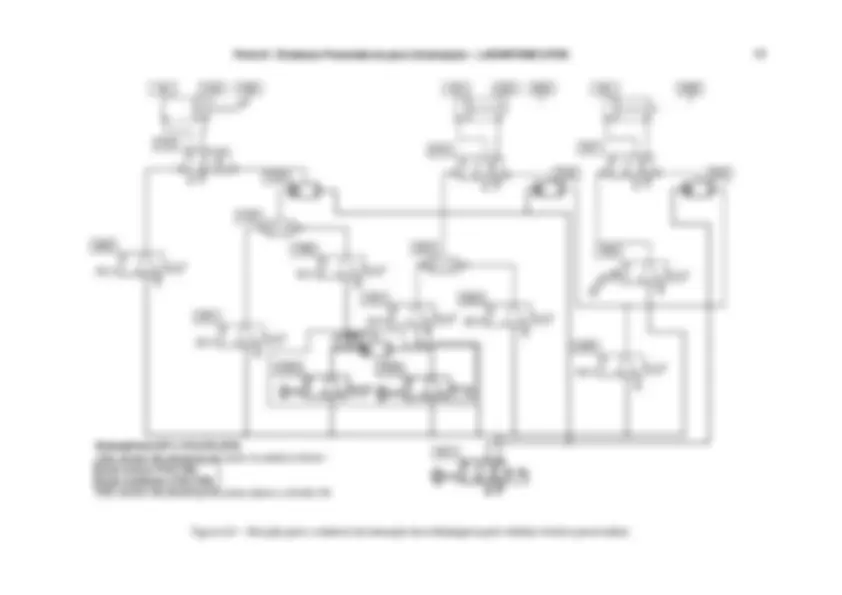
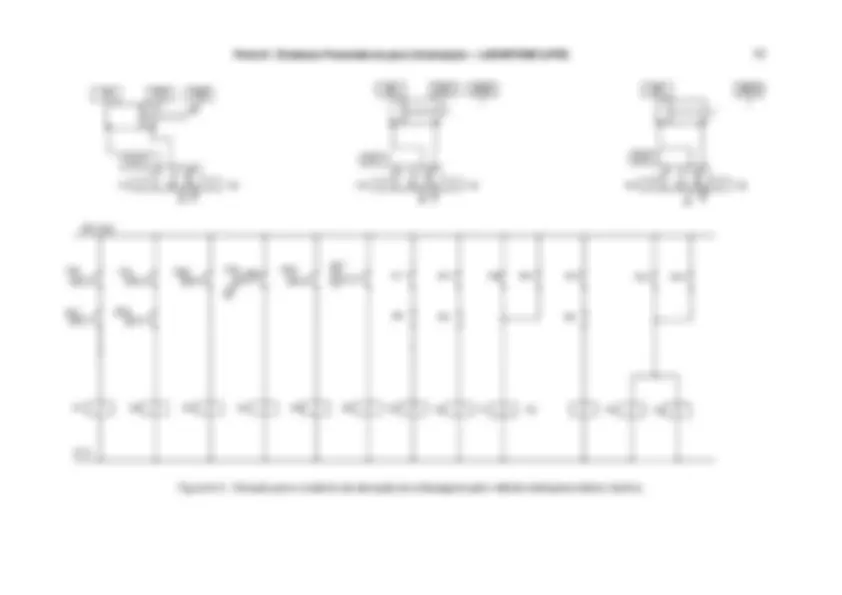
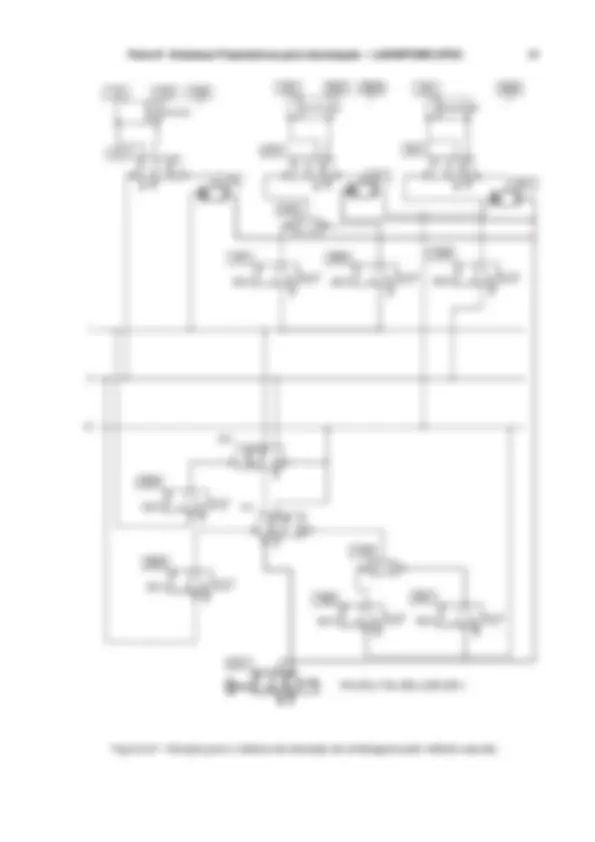
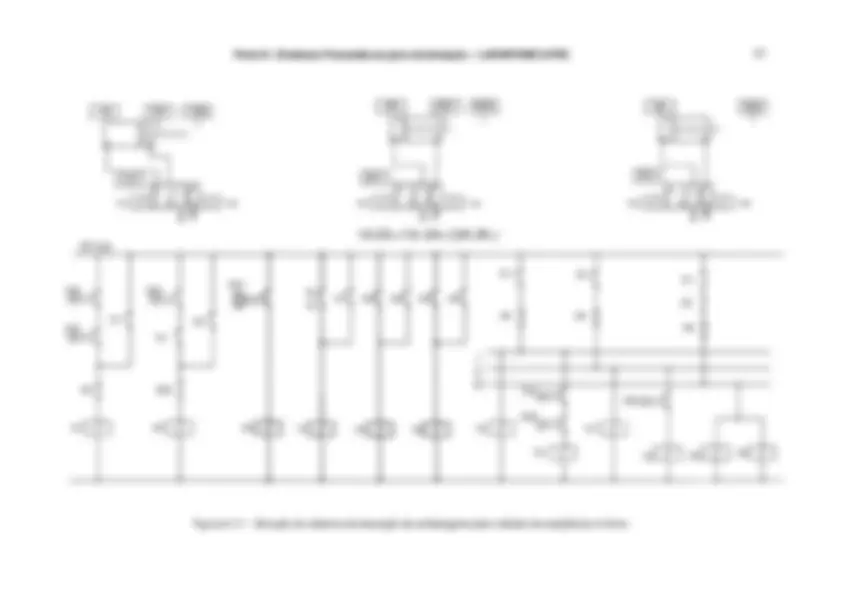
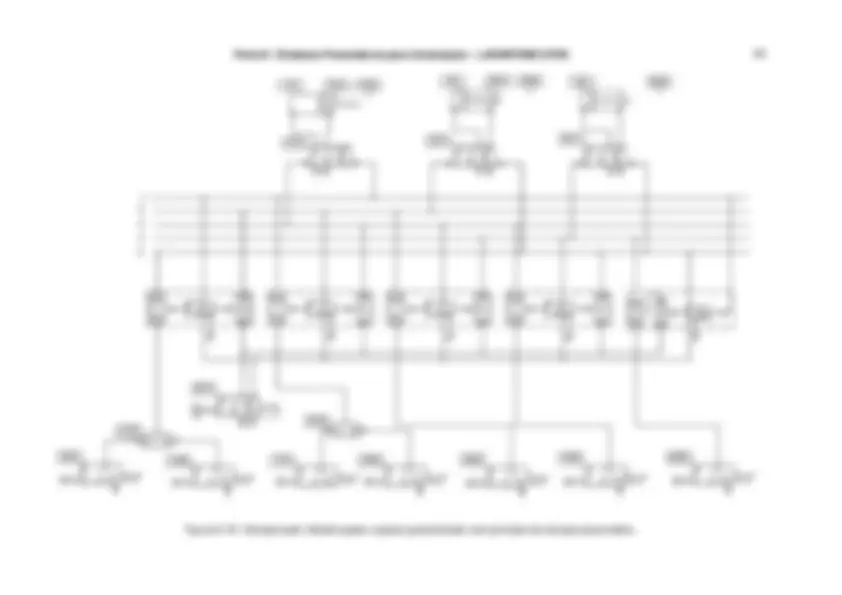
Figura 2.3 – Sistema de automação pneumático: a) Esboço do equipamento (FESTO, 199-); b) Diagrama Trajeto-passo; c) Sistema pneumático puro; d) Sistema eletro-pneumático; e) Sistema pneutrônico.
O escopo deste trabalho é o estudo dos sistemas pneumáticos para os quais pressupõe-se a existência de uma tomada de ar comprimido proveniente de uma fonte de ar comprimido. Conforme será detalhado nas seções subsequentes, estes sistemas podem resultar da combinação de dispositivos pneumáticos, elétricos e eletrônicos a fim de atender as especificações de determinada aplicação. De toda a forma, os elementos fundamentais são os cilindros, motores e/ou ventosas que realizam as ações mecânicas.
Na figura 2.3 apresenta-se três soluções para uma automação pneumática de elevação de produtos onde o circuito pneumático, composto pelos cilindros e suas válvulas de comando, é comum a todas elas. Visando a fundamentação acerca do projeto destes sistemas, descreve-se a seguir os sistemas de atuação básicos e, posteriormente, estabelece-se a estrutura global dos sistemas pneumáticos. No capítulo 5 apresentam-se os métodos correntes de projeto do sistema de processamento de informações, parte fundamental encarregada de integrar a operação dos vários atuadores.
a) b)
c) d)
Figura 3.2 – Cilindro de simples ação comandado por válvula direcional 3/2 com retorno por mola.
a) b)
c) d)
Figura 3.3 – Cilindro de simples ação comandado por válvula direcional 3/2 sem retorno por mola.
Uma típica aplicação de cilindro de simples ação é mostrada na figura 3.4 onde é executado esforço somente no avanço do cilindro que expulsa o frasco que estiver sem tampa.
Figura 3.4 – Exemplo de aplicação de cilindro de simples ação (FESTO, 199-).
Destaca-se que os diagramas de circuitos pneumáticos e hidráulicos são representados segundo as normas internacionais ISO 1219-1 (ISO, 1991) e ISO1219-2 (ISO, 1995). O ANEXO A apresenta os principais símbolos gráficos e regras para a elaboração destes diagramas.
3.1.1 Componentes pneumáticos
O número de vias mencionado acima corresponde ao número de conexões principais existente em uma válvula nas quais são conectadas as tubulações pneumáticas (ou hidráulicas); Exclui-se neste número as conexões de pilotagem. Por sua vez, o número de posições corresponde à quantidade de posições específicas que o elemento móvel da válvula é capaz de assumir.
Como exemplos construtivos para a válvula empregada nos circuitos da figura 3.2 têm-se as válvulas de carretel deslizante e de assento mostradas na figura 3.5. Observa-se que a posição de repouso, ou seja, quando não acionada, varia conforme detalhes construtivos
Figura 3.7 – Válvulas direcionais 3/2: a) Com acionamento mecânico e detente; b) Duplo piloto; c) Duplo solenóide (REXROTH, 1994).
As válvulas com retorno por mola têm como vantagem não necessitar de um novo sinal para mudar de posição, bastando eliminar o sinal de acionamento existente. Este fato é bastante apropriado quando estas válvulas são utilizadas como dispositivos para envio de sinais pneumáticos, conforme será visto posteriormente, ou em circuitos simples em que o operador avança e retorna o cilindro diretamente. No caso de válvulas acionadas por solenóide, normalmente este possui um tempo de comutação menor do que ocorre com a ação da mola. Como o tempo de comutação de uma válvula provoca atrasos na operação de uma máquina, este fato deve ser ponderado quando da construção de equipamentos com um grande número de sistemas de atuação.
Com respeito aos cilindros pneumáticos, apresenta-se na figura 3.8 a forma mais comum de cilindros de simples ação, com o corpo construído em alumínio e o êmbolo em aço.
Figura 3.8 – Cilindro de simples efeito (PINCHES & CALLEAR, 1996)
Observa-se que um cilindro de simples ação somente dispõe de energia pneumática para o avanço ou para o retorno decorrente da pressão existente no suprimento da válvula direcional e da capacidade de vazão da fonte de ar comprimido. Para a ação no sentido contrário, dispõe-se somente da força decorrente da compressão da mola ou então de uma força externa como uma massa elevada em um cilindro na vertical. Deste modo, os cilindros de simples ação são bastante empregados para fixação e expulsão de peças, elevação de cargas, movimentação de peças etc. onde pouquíssimo ou nenhum esforço é requerido no movimento contrário.
3.2 Cilindros de dupla ação com válvulas direcionais
Para haver um efetivo controle do avanço e retorno de um cilindro, as duas portas precisam ser conectadas às linhas de pressão e de escape em diferentes momentos. Para tal, comumente emprega- se um cilindro de dupla ação conectado a uma válvula direcional de quatro vias e duas posições (4/2) ou cinco vias e duas posições (5/2). A forma de acionamento da válvula é bastante variada, como visto para as válvulas 3/2, sendo que na figura 3.9 utiliza-se uma válvula com retorno por mola e outra com duplo solenóide. Funcionalmente as válvulas de quatro ou cinco vias são iguais sendo a última configuração efetivamente necessária quando se deseja regular a velocidade do cilindro através de válvulas reguladoras de vazão instaladas nas portas de retorno, conforme será visto na seção 3.2.2.
a) b)
Figura 3.9 - Cilindro de dupla ação comandado por: a) Válvula direcional 4/2 com acionamento por alavanca e retorno por mola; b) Válvula direcional 5/2 com duplo solenóide.
È também comum o uso de válvulas de três posições, existindo normalmente duas molas que provocam o retorno da válvula para a posição central quando cessa o sinal de acionamento. Com este tipo de válvula (figura 3.10) é possível alcançar uma condição intermediária para o cilindro. No circuito da figura 3.10a ambas as câmaras do cilindro estão conectadas para o escape quando a válvula está na posição de repouso, fazendo com que o cilindro possa ser movimentado por ação externa.
No caso da figura 3.10b, através da posição central é possível colocar o cilindro em uma posição
3.2.1 Componentes pneumáticos
A figura 3.12 apresenta exemplos para as válvulas empregadas nos circuitos da figura 3.9. São válvulas de dois estágios, isto é, a válvula principal (segundo estágio ou estágio principal) não é acionada diretamente pelo elemento de comando externo (mecânico, solenóide ou piloto) mas através de uma outra válvula (primeiro estágio ou estágio piloto) de menor porte. A válvula da figura 3.12a possui as seguintes características construtivas:
- Estágio principal: Tipo carretel deslizante
- Estágio piloto: Duas válvulas independentes do tipo assento
- Acionamento: Duplo solenóide
No caso da figura 3.12b tem-se:
- Estágio principal: Tipo assento
- Estágio piloto: Duas válvulas independentes do tipo assento
- Acionamento: Solenóide e retorno pneumático
a) b)
Figura 3.12 – Válvulas direcionais 4/2: a) Com acionamento por duplo solenóide (PINCHES & CALLENAR, 1996); b) com acionamento por solenóide e retorno pneumático (REXROTH, 1994)
3.2.2 Controle de velocidade
Nos circuitos da atuação é comum o emprego de válvulas redutoras de vazão para o ajuste de velocidade no avanço e retorno do cilindro. Em princípio existem três possibilidades de instalação das válvulas que são:
- Entre válvula direcional e cilindro, controlando a entrada de ar no cilindro (figura 3.14a)
- Entre válvula direcional e cilindro, controlando a saída de ar do cilindro (figura 3.14b)
- Nas vias de escape em válvulas de 5 vias, também controlando a saída de ar do cilindro (figura 3.14c)
a) b) c)
Figura 3.14 – Soluções para controle de velocidade em circuitos de atuação
O emprego de CLP’s no processamento de informações é a tendência de mercado hoje. Porém, a utilização de circuitos puramente pneumáticos é pertinente em determinadas situações como processamentos não excessivamente complexos e ambientes agressivos (poeira, umidade, vibração). A utilização de relés no processamento de sinais cada vez mais está sendo desconsiderada em função destes terem as mesmas restrições de ambiente operacional que os CLP’s mas com custo comparativamente mais alto e sem dispor da flexibilidade de programação daqueles.
Uma tendência de mercado está sendo a substituição dos CLP’s por computadores industriais que aliem a potencialidade de processamento de informações de um PC com a robustez e facilidade de programação dos CLP’s.
De forma geral, o projeto de sistemas automáticos pode ser decomposto em diversas etapas, realizadas de forma repetitiva e simultânea:
Concepção do processo físico/químico: Consiste em converter os requistos para o produto que o equipamento deverá produzir ou manipular em princípios físicos. Envolve principalmente especificações de construção mecânica, sendo aplicáveis esquemas ou esboços preliminares da estrutura da máquina.
Concepção dos sistemas de atuação: Consiste em identificar os princípios funcionais e suas interligações, representados através de diagramas de circuitos pneumáticos e/ou elétricos. Nesta etapa define-se os componentes de forma mais abstrata, sem necessidade de especificar detalhes como: se as válvulas serão pilotadas ou não, a vazão nominal das válvulas ou as áreas dos atuadores.
Concepção dos sistemas de medição: Consiste em identificar os princípios funcionais dos sensores e condicionadores empregando diagramas de circuitos pneumáticos e/ou elétricos para a representação da interligação destes.
Concepção do sistema de processamento de informações: Tal como no projeto conceitual dos sistemas de atuação, obtêm-se nesta etapa as diversas soluções para o processamento de sinais como circuitos pneumáticos, eletropneumáticos com relés e diagramas funcionais e diagramas de contatos.
Projeto de configuração do sistema de processamento de informações: Após a definição da tecnologia que será empregada para o processamento de informações, caracteriza-se de forma mais detalhada os componentes que serão necessários definindo-se, por exemplo, o tamanho nominal de válvulas, as características elétricas do CLP, potência de relés etc.
Projeto de configuração dos sistemas de atuação e de medição: Por fim, aplica-se o mesmo procedimento apresentado no item anterior para obter o detalhamento de válvulas de comando e cilindros e dos sensores. Nesta fase inclui-se a aplicação de métodos de dimensionamento do par cilindro-válvula como aqueles que prevêem a determinação dos coeficientes de válvulas. Com relação
aos sensores, realiza-se o dimensionamento, em termos de corrente de chaveamento, por exemplo, e faz-se a seleção a partir de catálogos.
Projeto de configuração do processo físico/químico: Implica no detalhamento da estrutura da máquina e o acoplamento com os sistemas de medição e de atuação. São gerados desenhos técnicos.
Dentre estas atividades, no presente trabalho enfoca-se:
- Apresentação de princípios construtivos de atuadores pneumáticos (Capítulo 3)
- Concepção do diagrama de circuito de atuações (Capítulo 3)
- Apresenta-se o procedimento de dimensionamento de circuitos de atuação incluindo válvula direcional e cilindro (Capítulo 5)
- Concepção do circuito elétrico, pneumático ou programa para a execução do processamento de informações. (Capítulo 6)