



REDES
REDES
INDUSTRIAIS
INDUSTRIAIS
Parte 2
Unidades 3 a 6
PROF: Clidenor Filho












































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
REDES INDUSTRIAIS - PARTE2
Tipologia: Notas de estudo
1 / 84

Esta página não é visível na pré-visualização
Não perca as partes importantes!
O presente material é constituído por seções elaboradas e organizadas a partir de livros, apostilas, catálogos de fabricantes e demais referências de comprovada relevância para o estudo de redes de comunicações industrias, os quais estão referenciados ao final de cada unidade, selecionados pelo Professor Clidenor Ferreira de Araújo Filho.
o Unidade 3 – Introdução às Redes Industriais o Unidade 4 – Interface ASI o Unidade 5 – Profibus o Unidade 6 – Devicenet
Setembro 2005
Figura 3.1.- Níveis de uma rede industrial
Nota-se que esta estrutura não é universal, existindo casos onde se encontram mais ou menos níveis, dependendo da dimensão do processo e da própria indústria.
A maioria das redes de comunicação existentes no mercado procuraram atender a demanda existente na automação de escritórios. A grande maioria destas redes são baseadas no protocolo CSMA/CD, com o qual se iniciaram os desenvolvimentos de redes locais. A comunicação de dados em ambiente industrial apresenta, no entanto, características e necessidades que tornam a maioria das redes para automação de escritório inadequadas. Algumas destas características são:
As redes de difusão apresentam aspectos interessantes que as tornam uma solução bastante adequada aos requisitos de comunicação industrial. Um problema importante na utilização das redes de difusão é o método de acesso ao meio (que é compartilhado) pois, uma vez que vários equipamentos deverão trocar informações num dado instante, a
decisão de quem vai ter o direito de uso do meio para o envio de uma mensagem não é uma tarefa evidente, como será visto nesta seção. Os protocolos de acesso ao meio tem papel fundamental no tempo de entrega de uma mensagem via rede. Como veremos a seguir, este tempo é importante para aplicações com características de tempo real. Aplicações Industriais freqüentemente requerem sistemas de controle e supervisão com características de Tempo-Real. Um Sistema Tempo-Real é um sistema computacional para o qual é requerida uma reação a estímulos (físicos ou lógicos) oriundos do ambiente dentro de intervalos de tempo impostos pelo próprio ambiente (Figura 3.2). A correção não depende somente dos resultados lógicos obtidos, mas também do instante no qual são produzidos.
Figura 3.2. Sistema de Controle em Tempo-Real.
A arquitetura de sistemas computacionais utilizados para controle e supervisão de processos industriais em tempo real tem apresentado nos últimos anos uma clara tendência para a distribuição das funções de controle, como ilustrado na Figura 3.3.
Figura 3.3. Arquitetura STR.
Figura 3.4. CSMA/NBA.
Suponha que os nós 1, 2 e 3 iniciem a transmissão simultaneamente. Todos os nós escrevem e lêem o mesmo bit do barramento até que o nó 2 tenta escrever um bit recessivo (1) e lê no barramento um bit dominante (0). Neste momento o nó 2 passa para o modo de leitura. Um pouco mais à frente o mesmo acontece com o nó 1. Isto significa que o valor do identificador da mensagem 3 tem um menor valor binário e portanto, uma maior prioridade que as demais mensagens. Para evitar que um nó gerador de uma mensagem de alta prioridade monopolize o suporte de transmissão tentando transmitir novas mensagens com a mesma prioridade imediatamente após a primeira, o espaço entre frames consecutivos é preenchido por um campo de bits em “1” inserido no final do quadro, com comprimento definido. O suporte de transmissão só é considerado livre para um nó enviar nova mensagem após ter detectado que o espaço interframes não foi interrompido por um bit em “0”. Isto implica em que a estação possuidora da mensagem de alta prioridade terá que esperar ao menos o envio de uma mensagem de prioridade menor para tomar o suporte de transmissão para si novamente (isto será feito no espaço interframes de mensagem menos prioritária).
Este protocolo possui dois tipos de serviço, o serviço programado e o não programado. O serviço programado permite que cada nó configurado tenha o seu momento para transmitir em cada intervalo. O serviço não-programado tem início com um nó diferente em cada intervalo. Durante o intervalo cada nó pode realizar diferentes acessos a rede dependendo da carga da rede.
Figura 3.5. CTDMA.
As redes industrias suportam dois modelos principais na modelagem de suas topologias. São eles os modelos Fonte/Destino (Mestre/Escravo e Peer-to-Peer) e Produtor/Consumidor (Multi-Mestre, Mudança de Estado do Dado e Cíclico).
Neste modelo as informações são trocadas entre dispositivos endereçados, ou seja, os quadros de dados necessitam dos endereços fonte e destino, como mostra a Figura 3.6.
Figura 3.6. Modelo Fonte/Destino.
(b)
Figura 3.8. Modelo Peer-to-Peer.
Neste paradigma os dados são identificados pelo seu conteúdo. A mensagem não necessita explicitar os endereços fonte e destino dos dados. Também não existe o conceito de mestre. Qualquer nó (dispositivo) pode iniciar um processo de transmissão. Vale ressaltar que, este paradigma permite também a utilização dos modelos apresentados anteriormente.
Figura 3.9. Modelo Produtor/Consumidor.
3.4.2.1 Multi-Mestre
Neste modelo uma mensagem pode alcançar diversos destinatários simultaneamente. Na Figura abaixo temos um exemplo com a troca de duas mensagens:
¾ A referência de posição do sensor é transmitida em multicast aos dispositivos CTRL1, 2 e HMI.
¾ O comando de velocidade do CTRL1 é transmitido simultaneamente aos três drives e ao HMI.
Figura 3.10. Modelo Multi-Mestre.
3.4.2.2 Mudança de Estado
Neste modelo os dispositivos relatam mudanças de estados. Logo, ao invés de termos um mestre realizando a leitura cíclica de cada dado, os dispositivos de campo enviam os dados ao mestre quando houver variação de um valor em uma variável. Como conseqüência o trafego na rede é reduzido e o desempenho ampliado. Também é possível configurar uma mensagem de heart beat. O dispositivo envia uma mensagem quando um dado variou ou quando o sistema ficar sem comunicação por um período de tempo determinado. Desta forma, sabe-se que o dispositivo está ativo ou não.
(a)
Para aumentar esta confiabilidade nas mensagens transmitidas, normalmente é usado um teste cíclico de redundância (CRC - Cyclic Redundance Check ), já visto na Unidade
Em sistemas que necessitem de uma operação contínua, pode ser utilizado um meio de transmissão e estações de controle redundantes. Além disso, os cabos utilizados em geral são blindados.
As redes de equipamentos são classificadas pelo tipo de equipamento conectado a elas e o tipo de dados que trafega pela rede. Os dados podem ser bits, bytes ou blocos. As redes com dados em formato de bits transmitem sinais discretos contendo simples condições ON/OFF. As redes com dados no formato de byte podem conter pacotes de informações discretas e/ou analógicas e as redes com dados em formato de bloco são capazes de transmitir pacotes de informação de tamanhos variáveis. Assim, classificam-se as redes quanto ao tipo de rede de equipamento e os dados que ela transporta como:
o DeviceBus
o FieldBus);
o SensorBus
Figura 3.13. Classificação das Redes.
Elas ligam nós sem ou com inteligência limitada com propósito de acessarem dados elementares de outro nó do processo, tal como estados de entrada/saída dos sensores e atuadores.
3.6.1.1 SensorBus
A rede sensorbus conecta equipamentos simples e pequenos diretamente à rede. Os equipamentos deste tipo de rede necessitam de comunicação rápida em níveis discretos e são tipicamente sensores e atuadores de baixo custo. Estas redes não almejam cobrir grandes distâncias, sua principal preocupação é manter os custos de conexão tão baixos quanto for possível. Exemplos típicos de rede sensorbus incluem Seriplex, ASI e INTERBUS Loop.
A palavra "campo" sugere qualquer coisa como geográfico ou limite contextual. Isto é particularmente verdadeiro em diferentes níveis de abstração, conforme poderemos verificar posteriormente quando tratarmos da integração e da produção (caso da produção integrada por computador - CIM). Por outro lado, a palavra "rede" é bem conhecida na ciência da computação: uma rede constitui-se por um conjunto de linhas elétricas comuns, ligando vários circuitos para transferir dados entre eles. Sem entrar em detalhes, quero no entanto, mencionar a relação entre "linhas comuns" e "vários circuitos": contrariamente a ligações ponto-a-ponto, as quais permitem dois circuitos trocar dados, uma rede une normalmente um grande número de entidades que desempenham um papel ativo nessa troca. Por outro lado, uma rede de campo transfere, na maior parte dos casos, informação de uma forma sequencial (série, uma após outra). A vantagem de uma transferência série é a requisição de apenas um número limitado de linhas (cerca de 2 a 3 na maioria dos casos), que permitem cobrir grandes distâncias. Este nível agrupa todas as redes que permitem a transmissão de quadros com o tamanho de 12 a 256 bytes. A resposta temporal é da ordem dos mili-segundos aos décimos de segundo. As redes de campo têm a tarefa de ligar unidades inteligentes que cooperam no processamento do trabalho produtivo, necessitando de mais respostas imediatas a tempos críticos que nos níveis mais elevados de uma cadeia produtiva. Uma vez que os nós funcionam conjuntamente, na maior parte dos casos, um nó coordena e distribui tarefas, o que corresponde a uma das razões pelas quais as redes de campo são construídas baseadas em uma hierarquia mestre-escravo (" master-slave "): o mestre controla operações e comunicações através de, ciclicamente, questionar os escravos -" polling "- que lhe podem responder apenas se ele lhes permitir. Este modo de procedimento elimina qualquer confusão na rede, uma vez que o protocolo permite apenas que um nó possa transmitir dados de cada vez. No entanto, esta estrutura rígida apresenta problemas no que diz respeito ao mestre: se um nó mestre pára de trabalhar corretamente, tudo deixa de funcionar. A maior parte das redes de campo atuais, tais como a Profibus FMS ou a nova BitBus ( IEEE-1118 ), é capaz de comutar o papel de mestre para outro nó se tal for necessário, ou se um mestre estiver inativo.
Figura 3.14. Pirâmide CIM.
Tais diferenças definem o primeiro critério para avaliar a escolha do tipo de rede a adotar. Parâmetros tais como tempo de resposta e quantidade de dados são geralmente conhecidos para determinada aplicação, embora possam mais tarde não serem facilmente integrados num conceito bem estruturado, tal como o da pirâmide CIM.
As exigências de comunicação entre unidades para a integração flexível dos sistemas de automação, descritas nos itens anteriores, evidenciam a necessidade de uma especificação de redes locais para aplicações industriais diferente daquela adotada em automação de escritório. Existem diversas redes proprietárias para ambiente fabril, desenvolvidas por grandes empresas e que normalmente utilizam um protocolo específico desenvolvido pelo próprio fabricante. Estas redes não permitem a interligação de equipamentos de outros fabricantes. Desta forma o usuário fica na total dependência de um único fornecedor. A arquitetura das redes de comunicação industrial deve integrar sistemas heterogêneos de diferentes fabricantes, suportando tanto a operação de chão de fábrica quanto as funções de apoio à produção. A definição de padrões de protocolos de comunicação e a sua adoção por diferentes fabricantes deverá permitir a interconexão (interoperabilidade) e até mesmo a intercambiabilidade das várias unidades de processamento (neste caso, equipamentos produzidos por fabricantes diferentes podem ser facilmente incorporados à instalação, simplesmente conectando-os ao sistema de comunicação). Entre as diversas iniciativas para padronização para redes industriais, merece destaque o Projeto MAP (incluindo MAP/EPA e MINI-MAP) como a primeira tentativa de criação de uma verdadeira rede de comunicação industrial.
O projeto MAP tem como mérito a apresentação de uma proposta concreta para a comunicação no ambiente de fábrica, estabelecendo as condições necessárias para a integração dos componentes de automação em um ambiente integrado segundo a pirâmide CIM. O projeto MAP nasceu no início dos anos 80 por iniciativa da GM (General Motors). Na época, apenas 15% dos equipamentos programáveis de suas fábricas eram capazes de se comunicar entre si. Além disso, os custos de comunicação eram muito elevados, avaliados em 50% do custo total da automação, isto devido às conexões especiais necessárias entre cada equipamento. Ainda, cada nova instalação ou expansão no sistema existente estava associada a uma despesa não desprezível. Considerando que, na época, estava previsto que a quantidade de equipamentos programáveis deveria sofrer uma expansão de 400 a 500% num prazo de 5 anos, o problema de comunicação tornou-se, efetivamente, uma prioridade a nível da empresa. Diante do grave problema, a decisão deveria ser tomada no sentido de definir uma solução que estivesse associada ao desenvolvimento de uma proposta padronizada que permitisse interconectar todos os equipamentos da planta. Neste contexto, surgiu o projeto MAP, através da criação de uma força tarefa reunindo profissionais das diversas divisões da GM, cujo objetivo inicial era investigar a possibilidade de utilização do modelo de referência OSI como base para a proposta padronizada da empresa. Um ano mais tarde, em 1981, a GM uniu-se a outras empresas - Digital Equipment Corporation (DEC), Hewlett-Packard (HP) e IBM - definindo a solução do problema baseada na utilização de uma arquitetura de comunicação para rede local baseada no modelo a sete camadas do OSI. Uma primeira preocupação deste grupo de trabalho foi a seleção de alguns dos padrões de protocolo definidos para o modelo OSI que pudessem ser adotados na arquitetura MAP. A partir dai o projeto foi ganhando corpo e adesões por parte de outras empresas, tornando-se uma realidade nos anos 90 e dando origem a outras propostas de arquiteturas de comunicação orientadas a outros níveis das atividades da empresa.
3.9.1 ARQUITETURA MAP
Uma vez adotado o modelo OSI como referência para a arquitetura de comunicação, o problema era selecionar as propostas a serem implementadas a nível de cada camada. Para as camadas 1 e 2, foram selecionados, respectivamente, as normas IEEE 802. (Token Bus) e IEEE 802.2 (LLC). Do ponto de vista da camada Física, foi escolhido o suporte de comunicação em banda larga (broadband), em função das seguintes razões:
Figura 3.15. Especificação MAP/TOP 3.0.
Dadas as necessidades específicas de cada nível hierárquico de uma empresa, verificou- se que a proposta MAP original não permitia cobrir todos os níveis considerados, sendo mais adequada aos níveis superiores. A razão principal disto é que, apesar da excelente qualidade dos serviços oferecidos, a arquitetura com sete camadas oferece um overhead que passa a ser indesejável nos níveis mais baixos das atividades de uma empresa, sobretudo para aplicações com tempo de resposta crítico. Uma primeira solução para este problema foi a definição de uma versão simplificada da arquitetura MAP, denominada MAP-EPA ( Enhanced Performance Architecture ). A Figura 3.16 apresenta a proposta MAP-EPA. Esta proposta foi baseada na definição de duas pilhas de protocolos, a pilha normal Full- MAP e a pilha MAP-EPA, desprovida das camadas de Rede, Transporte, Sessão e Apresentação. Do ponto de vista das camadas baixas, o protocolo IEEE 802. continuava sendo adotado, porém sobre um suporte de transmissão em banda de base (baseband) a 5 Mbps. Nesta arquitetura, um processo de aplicação tem a opção de enviar seus dados através da pilha normal ou, em casos onde o requisito seja um tempo de resposta rápida, pela pilha MAP-EPA. Evidentemente, o fato das camadas 3 a 6 estarem ausentes acarreta a perda dos serviços oferecidos por estas.
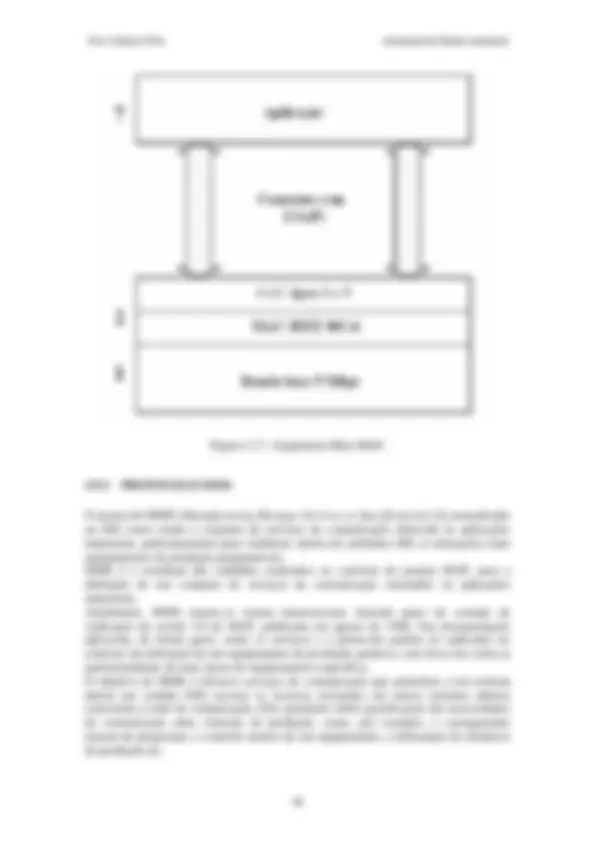
Figura 3.16. Arquitetura MAP-EPA.
Uma terceira opção relacionada com a norma MAP foi a arquitetura Mini-MAP, baseada igualmente na supressão das camadas 3 a 6 para eliminar o overhead dos protocolos daquelas camadas. A arquitetura Mini-MAP é composta unicamente do segmento simplificado de MAP-EPA, e foi assim definida para evitar o alto custo das pilhas de protocolos paralelas de MAP-EPA (Figura 3.17). Esta nova proposta era dedicada aos níveis mais baixos, permitindo a comunicação em aplicações mais simples como, por exemplo, entre sensores inteligentes. O fato de não possuir a camada de Transporte fez introduzir um protocolo de Enlace mais sofisticado que o da proposta MAP, o LLC tipo 3, datagrama com reconhecimento.