



Roberto F. Ausas
Sistemas lineares sobredeterminados
Matrizes n˜
ao quadradas
• Onde aparecem as matrizes n˜
ao quadradas?
1








Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Este documento aborda o tema de sistemas lineares sobredeterminados, onde aparecem matrizes não quadradas. O texto discute a importância desses sistemas, como fazer sentido de dados irregulares, e as tendências observadas em gráficos. Além disso, são apresentadas formulas lineares para estimativas rápidas e o conceito de sistemas sobredeterminados. O documento também discute a necessidade de considerar outros fatores além da área construída na estimativa.
Tipologia: Exercícios
1 / 15

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Roberto F. Ausas
ICMC - Ramal 736628, [email protected]
Matrizes n ˜ao quadradas
m^2 m^2 m 1=sim kR$ 1 202 140 1998 0 3 3 2 0 2 0 423 2 250 137 2011 1 2 4 1 0 3 1 611 3 156 102 2001 1 1 3 1 0 1 1 354 4 353 182 2004 3 0 4 1 12 3 0 712 5 198 145 1983 2 1 5 1 0 2 0 387 6 376 251 2007 3 1 5 2 14 3 1 971 7 242 165 2015 1 3 4 2 12 3 1 765 8 177 133 1976 0 3 3 1 0 1 1 313 9 298 223 1997 3 0 5 1 0 2 1 789 10 422 351 2004 3 2 7 2 18 3 1 1310 11 202 140 1998 0 3 3 2 0 2 0 423 12 250 137 2011 1 2 4 1 0 3 1 611 13 156 102 2001 1 1 3 1 0 1 1 354 14 353 182 2004 3 0 4 1 12 3 0 712 15 198 145 1983 2 1 5 1 0 2 0 387 16 376 251 2007 3 1 5 2 14 3 1 971 17 242 165 2015 1 3 4 2 12 3 1 765 18 177 133 1976 0 3 3 1 0 1 1 313 19 298 223 1997 3 0 5 1 0 2 1 789 20 422 351 2004 3 2 7 2 18 3 1 1310 21 202 140 1998 0 3 3 2 0 2 0 423 22 250 137 2011 1 2 4 1 0 3 1 611 23 156 102 2001 1 1 3 1 0 1 1 354 24 353 182 2004 3 0 4 1 12 3 0 712 25 198 145 1983 2 1 5 1 0 2 0 387 26 376 251 2007 3 1 5 2 14 3 1 971 27 242 165 2015 1 3 4 2 12 3 1 765 28 177 133 1976 0 3 3 1 0 1 1 313 29 298 223 1997 3 0 5 1 0 2 1 789 30 422 351 2004 3 2 7 2 18 3 1 1310 31 202 140 1998 0 3 3 2 0 2 0 423 32 250 137 2011 1 2 4 1 0 3 1 611 33 156 102 2001 1 1 3 1 0 1 1 354 34 353 182 2004 3 0 4 1 12 3 0 712
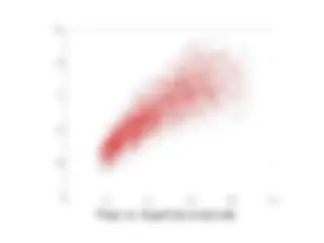
Prec¸o vs. Superf´ıcie constru´ıda
uma f ´ormula para realizar uma estimativa r ´apida.
E popular procurar f ´´ ormulas lineares (afins), do tipo
prec¸o ≃ constante 1 + constante 2 × supconstr
Isto ´e, procurar k 1 e k 2 tais que
k 1 + S 1 k 2 = P 1 k 1 + S 2 k 2 = P 2 ... ... k 1 + Sm k 2 = Pm
1 Sm
k 1 k 2
Pm
Eis aqui um sistema sobredeterminado.
ajustar uma quadr ´atica,
prec¸o ≃ k 1 + k 2 × supconstr + k 3 × supconstr^2
k 1 + S 1 k 2 + S 12 k 3 = P 1 k 1 + S 2 k 2 + S 22 k 3 = P 2 ... k 1 + Smk 2 + S m^2 k 3 = Pm
1 Sm S m^2
k 1 k 2 k 3
Pm
Eis aqui mais um sistema sobredeterminado.
Ele tamb ´em n ˜ao tem chance de ter soluc¸ ˜ao.
a ´area construida, havendo outros fatores importantes. Podemos suspeitar que ´e necess ´ario incluir na estima- tiva a superf´ıcie do terreno :
prec¸o ≃ k 1 + k 2 × supconstr + k 3 × supterr
1 Sm Tm
k 1 k 2 k 3
Pm
Eis aqui mais um sistema sobredeterminado.
Verifiquemos:
A v = (c 1 S ... Scn)
v 1 v 2 ... vn
= (c 1 S ... Scn)
v 1 0 ... 0
vn
= v 1 c 1 + v 2 c 2 + ... + vn cn 2
No caso do sistema sobredeterminado Ax = b, existe soluc¸ ˜ao se e s ´o se b ∈ col(A) = Im(A).
b ~∈ col(A) ⇒ r (x) = Ax − b ≠ 0 , ∀ x ∈ R n
Mas isto n ˜ao quer dizer que todos os x estejam igualmente
errados!
Como escolher um deles?
Equac¸ ˜oes normais
Resulta natural escolher a soluc¸ ˜ao de quadrados m´ınimos
que ´e:
A soluc¸ ˜ao x∗^ do sistema sobredeterminado Ax = b que minimiza YAx − bY 2 : i.e.,
YAx∗^ − bY 2 ≤ YAx − bY 2 ∀ x ∈ Rn^.
Quando poderia aparecer um caso de G ≠ I? Um caso ´e
quando se da um peso diferente pi > 0 a cada equac¸ ˜ao (con-
fiabilidade da medic¸ ˜ao?).
G = diag(p 1 , p 2 , ... , pm)
Teorema (Equac¸ ˜oes normais): Seja A ∈ Rm×n, uma matriz de posto completo, a soluc¸ ˜ao de quadrados m´ınimos do sistema A x = b e dada pela´ soluc¸ ˜ao do sistema:
AT^ A x∗^ = AT^ b. (1)
Prova: Vamos supor que existe um certo x∗^ que minimiza
sobre todos os x a norma YA x − bY 2. Vamos tomar um x =
x∗^ + d (i.e., uma perturbac¸ ˜ao do x∗^ com um d arbitr ´ario)
YAx − bY^22 = (Ax − b)T^ (Ax − b) = (Ax∗^ + Ad − b)T^ (Ax∗^ + Ad − b) = YAx∗^ − bY^22 + 2 dT^ (AT^ Ax∗^ − AT^ b) + YAdY^22