Download Typical Process Systems-Process Control-Lecture Slides and more Slides Process Control in PDF only on Docsity!
CHAPTER 5 : TYPICAL PROCESS
SYSTEMS
When I complete this chapter, I want to be
able to do the following.
Predict output for typical inputs forcommon dynamic systems
Derive the dynamics for importantstructures of simple dynamic systems
Recognize the strong effects on processdynamics caused by process structures
docsity.com
Outline of the lesson.
Common simple dynamic systems- First order
-Second order
- Dead time
- (Non) Self-regulatory
Important structures of simple systems- Series
Workshop
CHAPTER 5 : TYPICAL PROCESS
SYSTEMS
docsity.com
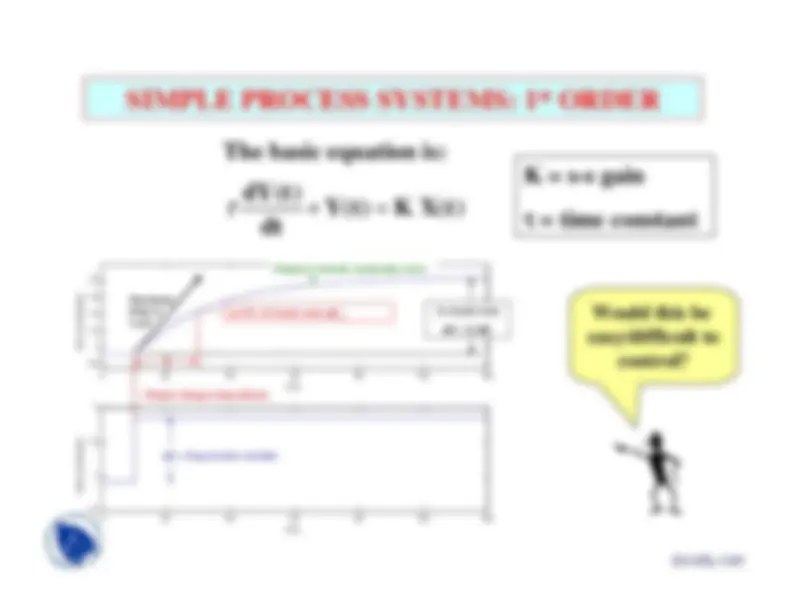
SIMPLE PROCESS SYSTEMS: 1
st
ORDER^ These are simple
first order systems
from severalengineering
disciplines.
docsity.com
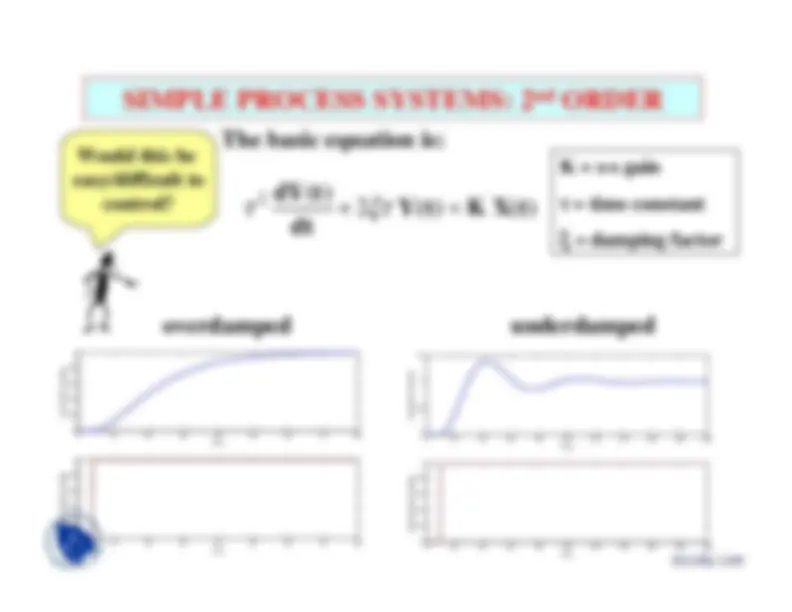
SIMPLE PROCESS SYSTEMS: 2
nd
ORDER
The basic equation is:
) t ( X K ) t ( Y
dt
t (
dY
2
K = s-s gain ττττ
= time constant ξξξξ
= damping factor
0
10
20
30
40
50
60
70
80
0 0.8 0.6 0.4 0.
1
Time
Controlled Variable
0
10
20
30
40
50
60
70
80
0 0.8 0.6 0.4 0.
1
Time
Manipulated Variable
0
20
40
60
80
100
120
140
160
180
200
0
1
Time
Controlled Variable
0
20
40
60
80
100
120
140
160
180
200
0 0.8 0.6 0.4 0.
1
Time
Manipulated Variable
overdamped
underdamped
Would this beeasy/difficult to
control?
docsity.com
SIMPLE PROCESS SYSTEMS: DEAD TIME
time
X
in X
out
θθθθ
= dead time
θ
Would this beeasy/difficult to
control?
)
(
)
(
)
(
)
(
s
X
e
s
X
t
X
t
X
in
s
out
in
out
θ
θ
−
=
−
=
docsity.com
SIMPLE PROCESS SYSTEMS: INTEGRATOR
pump
valve
Level sensorLevel sensor
Liquid-filled
tank
Plants have many inventories whose flows in and out donot depend on the inventory (when we apply no controlor manual correction).These systems are often termed “pure integrators”because they integrate the difference between in and outflows.
out
in
F
F
dLdt
A
dt dV
−
=
=
)
(
)
(
)
(
)
(
L
f
t
F
L
f
t
F
in out
≠ ≠
docsity.com
SIMPLE PROCESS SYSTEMS: INTEGRATOR
pump
valve
Level sensorLevel sensor
Liquid-filled
tank
out
in
F
F
dL dt
A
dt dV
ρ
ρ
ρ
ρ
−
=
=
F
out
F
in
time
Level
docsity.com
SIMPLE PROCESS SYSTEMS: INTEGRATOR
pump
valve
Level sensorLevel sensor
Liquid-filled
tank
Non-self-regulatory variablestend to “drift” far fromdesired values.
We must control thesevariables
Let’s look aheadto when weapply control.
docsity.com
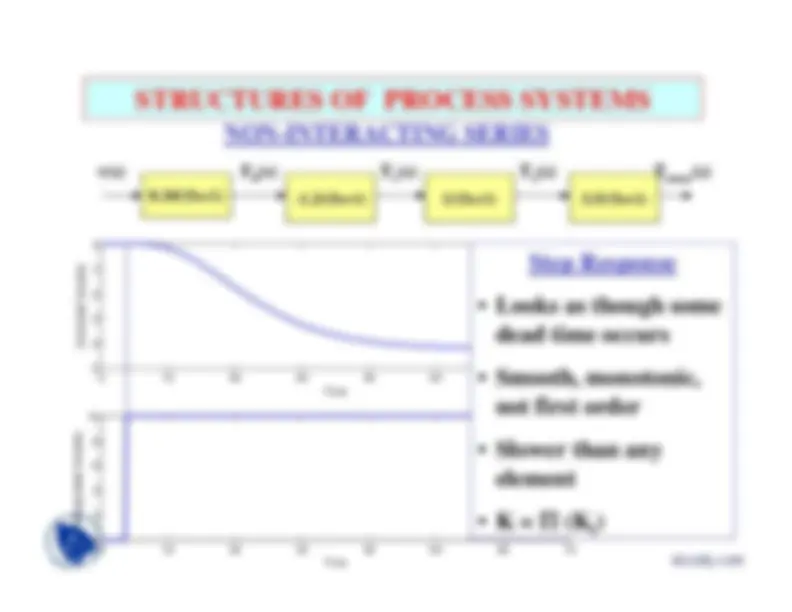
STRUCTURES OF PROCESS SYSTEMS
NON-INTERACTING SERIES
G
valve
(s)
G
tank
(s)
G
tank
(s)
G
sensor
(s)
v(s)
F
0
(s)
T
1
(s)
T
2
(s)
T
meas
(s)
s
G
s
X
s
Y
i
n
Π i
=
1
In general:With eachelement a firstorder system:
1
=
K s
s
X
s
Y
i
i
n i
τ
overall gain isproduct of gains
no longer first ordersystem
slower than anysingle element
docsity.com
0
10
20
30
40
50
60
70
(^0) -1 -2 -3 -4 -
Time
Controlled Variable
0
10
20
30
40
50
60
70
8 6 4 2 0 10
Time
Manipulated Variable
STRUCTURES OF PROCESS SYSTEMS
NON-INTERACTING SERIES
0.10/(5s+1)
1/(5s+1)
-1.2/(5s+1)
3.5/(5s+1)
v(s)
F
0
(s)
T
1
(s)
T
2
(s)
T
meas
(s)
Step Response
Looks as though somedead time occurs
Smooth, monotonic,not first order
Slower than anyelement
K =
(K
i
docsity.com
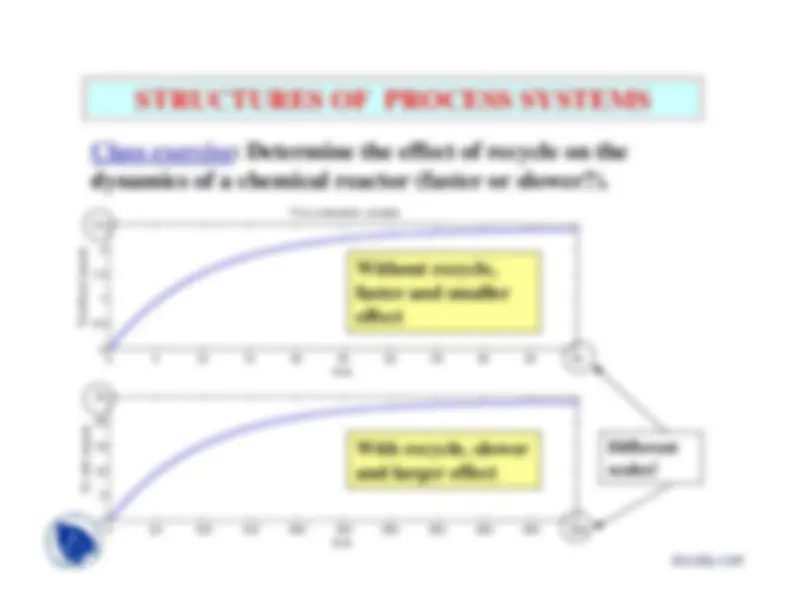
STRUCTURES OF PROCESS SYSTEMS
Class Exercise: Sketch the step response for the systembelow.
ττττ
θθθθ
docsity.com
STRUCTURES OF PROCESS SYSTEMS
Class Exercise: Sketch the step response for the systembelow.
0
5
10
15
20
25
5 4 3 2 1 0
DYNAMIC SIMULATION
Time
Controlled Variable
0
5
10
15
20
25
5 4 3 2 1 0
Time
Manipulated Variable
docsity.com
0
2
4
6
8
10
12
14
16
18
20
4 3 2 1 0
time
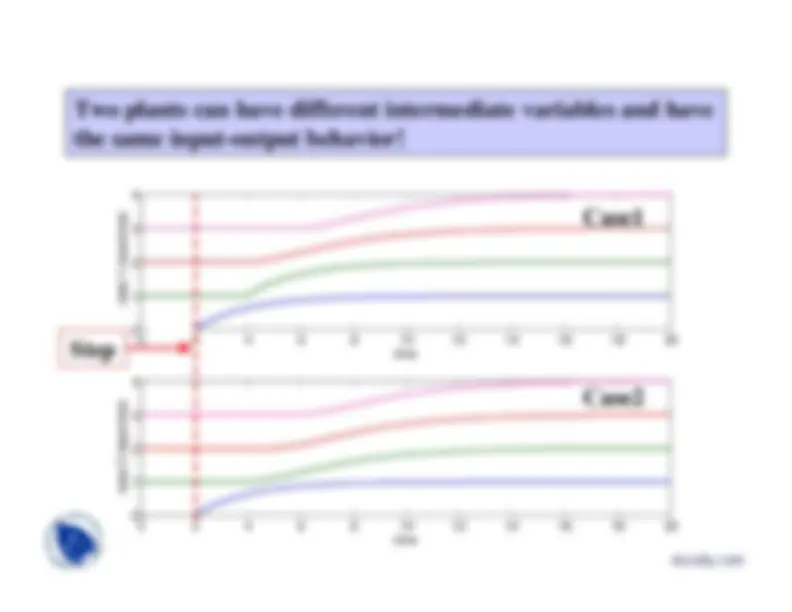
case 1 responses
0
2
4
6
8
10
12
14
16
18
20
4 3 2 1 0
time
case 2 responses
Two plants can have different intermediate variables and havethe same input-output behavior!Step
Case1 Case
docsity.com
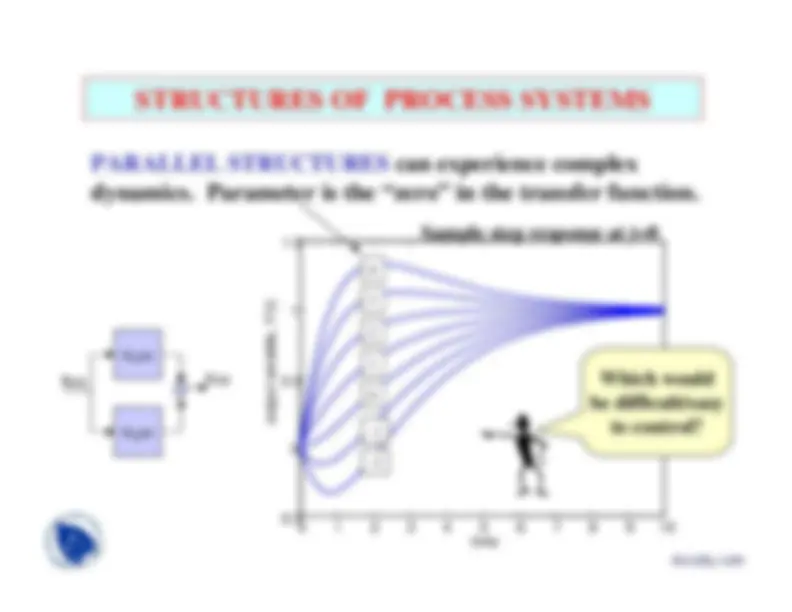
STRUCTURES OF PROCESS SYSTEMS
PARALLEL STRUCTURES result from more than onecausal path between the input and output. This can be aflow split, but it can be from other process relationships.
G
1
(s)
G
2
(s)
X(s)
Y(s)
A
B
C
Example process systems
Block diagram
docsity.com