Vista previa parcial del texto
¡Descarga EE0341 y más Apuntes en PDF de Ingeniería Marina solo en Docsity!
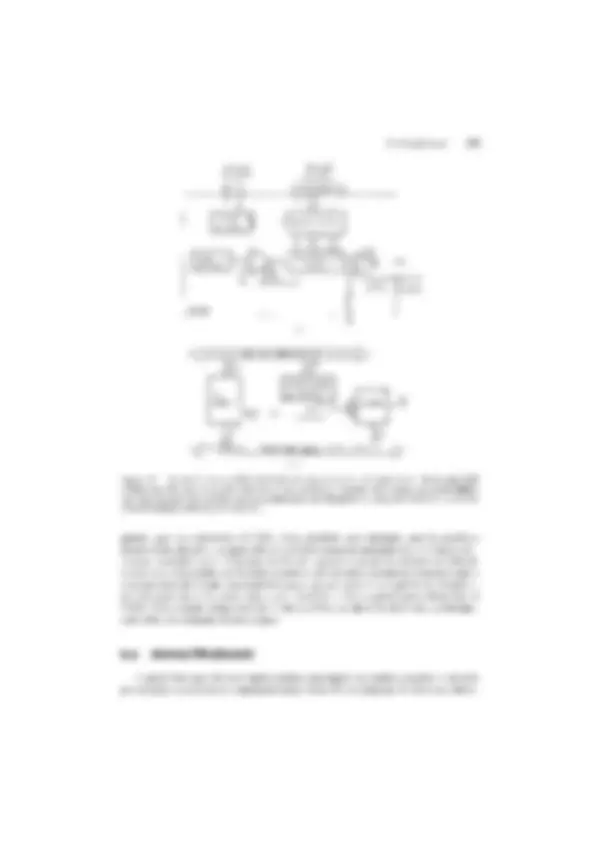
Capítulo 8 La etapa de salida en la distribución de señales Según el tipo de disposilivo que deba recibir la información, su señal de en- trada debe ser en forma digital (alarmas, visualizadores numéricos, motores de paso a paso, impresoras, modems....), o amalógica (señales de verificación, motores de continua, trazadores de gráficos, altavoces,...). Para las señales digitales, las Operaciones habituales antes de su acondicionamiento de potencia son la transfe- rencia a un registro, para no cargar directamente cl bus del sistema, y una conver- sión de código, en su caso. Cuando la diferencia de potencial entre masas es alta, hay que incluir un aislamiento galvánico, análogo al aislamiento de entrada visto en el apartado 3. Aquí el aistamiento se sucle realizar por vía Óptica. Cuando hay que obtener una salida analógica, una función importante es la re- construcción de la forma de onda a partir de los valores numéricos obtenidos por el procesador. Esta función se basa cn un CDA y un extrapolador, Para reducir los transitorios del CDA se emplean filtros específicos. 8.1 OBTENCIÓN DE SEÑALES ANALÓGICAS La obtención de una señal analógica a partir de la información gencrada por un procesador digital, se hace mediante un CDA, Éste ofrece, en respuesta al có- digo presente a su entrada, una salida en forma de tensión o corriente. o de ganan- cia controlada (caso de CDA con tensión de referencia externa —los denomina- dos vonvertidores multiplicadores—). Además, para que la salida tenga el valor inferior y el margen de amplitudes deseados, se suele poner un amplificador inme- diato al CDA. La asignación del valor de entrada E nceesario para tener una salida $ deter- minada, en un convertidor cuyos márgenes respectivos de entrada y salida son ME y MS, se hace según la fórmula E=SXP+ER0 (8.1) 308 La etapa de salida en la distribución de señales donde P = ME/MS, y £0 es el valor que hay que poner a la entrada para tener una salida de 0 V. Ejemplo. Sea un CDA de 12 bits, con valores de entrada entre — 2.048 y 2.047. Para distin- tos márgenes de salida, los valores de P y ED para aplicar (8.1) son Margen de salida P E0 0a10V 409,5 — 2.048 104 10V 204,75 v da5sv 819 2.048 -5as5V 409.5 v 2.5225 Y 819 0 Es interesante observar que para salidas unipolares el valor central del margen de salida no corresponde exactamente a una entrada O, sino a otra ligeramente distinta, La relación entre los códigos de entrada y la salida analógica es Código Entrada digital Salida analógica Binario natural 1111 11111141 +FE-11SB 1000 00000000 Media escala 0141 01114141 Media escala --1 LSB 0060 00000000 Cero Binario desplazado 11414 11110111 + FE-1LSB 1000 00000000 Cero 0111 SIT UML Cero-— 1 LSB 2000 00000000 -FE El CDA no produce ningún error de cuantificación pero admite sólo un con- junto finito de valores de entrada. Esto equivale a tener un error de redondeo en los cálculos, ya que sj, por ejemplo, el procesador trabaja con una precisión de 16 bits y e] CDA es de 12 bits, la precisión final de la salida analógica será a lo sumo de + (12) bit de] CDA. La transferencia del código digital entre el procesador y la entrada del CDA se puede hacer de varias formas. En cualquier caso, hay que tener en cuenta que el CDA en sí mismo es «transparente», es decir, ofrece a su salida el equivalente a la entrada presente en aquel momento; además, dicha entrada debo estar en formato paralelo, Por ello, cuando no se quiere dedicar un puerto E/S exclusivamente al CDA, bay que interponer un registro entre el bus del sistema y el convertidor: cuando una señal de control está en un estado determinado, el sistema es transpa- rente y la salida sigue a la entrada: cuando dicha señal está en cl otro estado, la sá- lida del registro queda bloqueada y ofrece al convertidor el último código autori- zado, Algunos CDA incluyen internamente dicho registro, y el dispositivo aparece como una dirección de memoria más (figura 8.1). En otros casos se emplean dos niveles de registros: el primero puede adquirir cualquier entrada digital, pero hace falta una orden expresa para transferirla al se- 310 La etapa de salida en la distribución de señales BJS DE DATOS » vo Ditección ' lecodific Registral] CDA | decos 1 Py coa | Ya 1 v Li dregistrobies] eya E a Carga a? 2 - intemaptor] o A a] a de 2 D, [regstrol_0_,.| coa Y A sica Cargo BUS DE 3 3 CDA | Vos DIRECCION] 3 » E y LT áfc Registro DA 3 . ec A os [e 7 e a) LE a Carga Laos LE coa io (5) Figura 8.2 Estructuras para la distribución de señales empleando demultiplexado digital. (2) Demultiplexado basado en el bus del procesador. (b) Demultiplexado mediante interruptores externos al bus y CDA con registro de entrada. turas que, en términos generales, se distinguen porque demultiplexan bien la en- trada digital al CDA, bien su salida analógica. En la figura 8.24 se presenta la solución más obvia: dado que el bus de datos de un ¿P está inherentemente multiplexado, se puede añadir un par registro-CDA por cada canal de salida, y clegír en cada momento el CDA descado mediante un decodificador de direcciones. La presencia de dos niveles de registros, o la disposi- ción de un separador entre el bus y el registro previo al CDA, permiten aislar éste del ruido del bus. Además del coste de los CDA, un inconveniente de esta solución es que al ha- ber varios disposilivos conectados al bus, éste debe soportar ma carga eléctrica elevada: típicamente de 4 a 8 pF por cada línea de dalos. El sistema de la figura 8.2b emplea también demultiplexado digital, pero ahora se interpone un demulti- plexor entre cl bus y el conjunto de convertidores. De costa forma, sólo el CDA se- leccionado queda conectado al bus ste soporta una carga mucho menor. Un in- conveniente respecto a la solución de la figura 8,24 cs la complejidad del sistema de interruptores de demultiplexado. Hay circuitos integrados que tienen hasta cuatro CD. que facilitan esta solución y la anterior. El demultiplexado analógico reduce el número de CDA necesarios, a costa de emplear varios amplificadores de muestreo y retención. En el caso de la figura 8.34, todos los amplificadores SH reciben la misma señal de entrada, pero sólo uno de ellos la transfiere a su salida; el resto ofrecen la señal retenida en su con- densador. Obviamente, el tiempo máximo de retención disponible es limitado. Cuando se tienen varios CDA con registro de entrada, en cambio, el tiempo de re- tención es ilimitado, sin necesidad de una actualización periódica. Una considera- Demultiplexado — 311 ción adicional sobre la solución basada en amplificadores S£:H se refiere a su tiempo de adquisición: dado que. en general, éste excederá de 1 us, hay que tener la precaución de mantencr la salida del CDA constante durante el tiempo necesa- rio para que se adquiera el valor final, pero sin hipotecar el bus del 4P durante in- tervalos de tiempo largos. En la figura 8.36 se presenta otra solución con demultiplexado analógico, em- picada en la tarjeta D/A cuyas especificaciones se dan en la tabla 8.1. Los proble- mas de diafonía y fugas son mayores que en el caso anterior, porque todas las se- ñales analógicas se concentran en el multiplexor, pero el diseño es más simple. En todas estas aplicaciones, los amplificadores SH deben tener tiempos de adquisición y establecimiento breves, seguidos de tiempos de retención largos, a diferencia de las aplicaciones de conversión A/D donde tanto la adquisición de una muestra como su conversión deben ser rápidas. SE Yo 1 a Lu paros TD] CDA [o Control Targa z SA Yo HOR : =A s pa Y pa a OS E Vaz 4 pirección Es] del SEH elegido la) SEM A] coa Ha] “MX 7 57 + vos BUS de DATOS e (GET ss (b) Figura 8,3 Estructuras para la distribución de señales empleando demultiplexado analógico. ta) Demultiplexado basado en las señales de control. (b) Demultiplexado analógico directo (Documentación Data Translation, modelo DT 2815). Reconstrucción de señales: extrapolación — 313 8.3 RECONSTRUCCIÓN DE SEÑALES: EXTRAPOLACIÓN El muestreo de señales exige un filtro interpolador para reconstruir la forma de onda de la señal muestreada. La relación señal-ruido se puede mejorar me- diante filtrado digital. A la vez, la cuantificación conlleva un ruido cuya posible re- ducción mediante filtrado cabo tencr en cuenta. La interpolación es el proceso de reconstrucción del valor de una señal s(£) en un instante f a partir de sus valores en n instantes discretos, entre 0 y 27, cuando y os un instante del intervalo [0, 27]. El filtrado numérico y la interpolación son objeto de estudio del procesamiento digi- tal de señales, En los sistemas de medida de lorma de onda, donde no intercsa el valor de la señal en un instante dado sino su forma, y en sistemas de control digital. donde los actuadores pueden incluso quedar dañados si se les aplican señales de alta fre- cuencia, hay que obtener una señal continua de salida, no un tren de impulsos como ofrece un CDA. que responde directamente al código aplicado a su entrada, La extrapolación es cl proceso de aproximación del valor de una scñal s(f) en un instante 1 a partir de sus valores cn » instantes discretos, entre O y nT, cuando 7 es un instante que queda [ucra del intervalo [0, 27]. Cuanto más alejado esté £ del in- tervalo [0, 17], mayor será el error de extrapolación. Para encontrar s(t) en el intervalo de tiempo entre 27 y (1 + 1)7, se puede de- sarrollar en serie de potencias, SO) SAT) + (a TD) [1 aT] + en -2T12+... (8.2) donde s,(1) = s(2) en el intervalo 17 < 1 < (a + 1)7. Para conocer s,(T) hacen falta, pues, las derivadas de s(t) en el instante 17. Como sólo conocemos los valores de s(9) en los instantes de muestreo, hay que cstimar las derivadas a partir de las muestras de la señal. Un método es: sur 507) -s(n-U M] (834) ] sinT)= “AD 1 + (07) -2([n-1]7) +s(n-2] 1)] (8.3b) En general, para estimar la derivada de orden k hacen falta k + 1 muestras de la señal. Ahora bien. por una parte la realización física de cxtrapoladores de orden elevado es compleja; y por otra parte el uso de muestras muy retrasa- das puede provocar incstabilidades en el caso de sistemas de control en lazo cerrado. 314 La etapa de salida en la distribución de señales 8.3.1 Extrapolación de orden cero La extrapolación más habitual en la reconstrucción de señales es la de orden cero (o retención de orden cero) (figura 8,4c). Consiste en tomar 0) =sGT) (8.4) El efecto de una retención de orden cero y duración 7 se puede interpretar como el resultado de aplicar la serie de muestras s,,(£) = s(1T), n entero, a un sis- tema cuya respuesta a un impulso unitario es un impulso de duración 7 (figura 8.54). Es decir, tenemos h(t)=1 parad 7, y paraf<Ú (8.5b) El objetivo es ahora calcular el efecto de esta retención en el espectro de s,(4). La transformada de Fourier de hy(1) es Hol) = p (0 exp Lej2xfa dez fe Ej2xfe den 0 1 sen Afr =——-[t- _ Sp Pf [1 0xp Earl af exp (-jmfa (64) (0) (6) pa + 5) (9) Figura 8.4 Reconstrucción de una seña! senoidal (a) a partir de sus muestras uniformes se- paradas un tiempo 7, (b). (c) Mediante una retención de orden cero y duración T. (d) Mediante una extrapolación de primer orden. 316 La etapa de salida en la distribución de señales de mancra que el espectro de s,,(£) queda modificado por una función senc, y en particular también gueda modificado el lóbulo de banda base, que es el que se considera para la recuperación de s(t). Esta modificación es tanto más pequeña cuanto menor sea 7, pero un valor de 7 muy pequeño implica unos impulsos de sa- lida muy estrechos (y, por tanto, la señal obtenida no sería continua, y tendría muy poca energía). Normalmente se toma 7= 7 (separación entre muestras), pero las muestras deben ser suficientemente próximas (7 pequeño) para no distorsio- nar en exceso el espectro de la señal, cs decir, aquí no se aplica el criterio de Ny- quist, Un CDA con un registro de entrada se comporta como un extrapolador de orden cero, Ejemplo, Determinar la relación entre el periodo de retención í de un muestreador como el de la figura 8.5a y la frecuencia máxima de la señal muestrcada, si sc desea que la ate- nuación de ésta no exceda de 1/1.024 con respecto a la continua. La respuesta frecuencial del muestrador a frecuencia f.y, es SON Afyt Aft (400! La respuesta en continua es z. El error relativo será 1H! pa T Deseamos e< 111.024, Por lo tanto [H MON >1-1/1.024 <= 0,99902 T y de aquí, fut<24 Xx 107 = 1/41 Es decir, para mantener un error de amplitud inferior a 1/1.024, hay que tener un tiempo de retención que sea 41 veces inferior al periodo de la señal. O sca. hay que aproximar la senoide mediante 41 tramos escalonados. Para atenuar las componentes de alta frecuencia, incluidas las que surgen del efecto no lincal de la limitación de velocidad de subida del CDA (slew rate), a la retención de orden cero se le suele añadir un filtro (analógico) de paso bajo sim- ple. Su efecto se estudia en el apartado 8.3.4, 8.3.2 Extrapolación de primer orden La extrapolación de primer orden o lineal (first-order hold) consiste en tomar sólo los dos primeros términos del desarrollo (8.2), Reconstrucción de señales: extrapolación 317 50 =s(1T) +s (nT) [17] (8.8) donde s'(1F) la aproximamos mediante la ecuación (8.3a). Es decir, para recons- truir la señal en un instante posterior a 17 se integra la diferencia entre dos mues- tras adyacentes, correspondientes a los instantes (1 — 1) T y 17. El resultado para el caso de una senoide sc muestra en la figura 8.4d. La función de transferencia de este interpolador se puede obtener a partir de su respuesta impulsional, £,(+). Aplicando 4(1) en el instante + = 0, tendremos (ti- gura 8.64): — Enn=0, Dests 510) =3(0) = DA, (8.94) dado que s(0) = 40) =1 y s—T) =$ 7) =0, queda, para0<1<7, Ita = sql) = 1 +47 (8.9b) -- Enn=l, =5(0 slo) =s(0 + 00 LT] (6.104) dado que s(0) = 1 y s(7) = 0, queda, para T<1<27, AO = 1-47 (8.10b) Dado que s(17) = ( para n > 1, resulta A,(0) = 0 en todos los intervalos de mues- treo adicionales. H,(f) se puede calcular por ejemplo mediante la transformada de Laplace, y se obliene (8.110) De aquí se deduce, ,| sen2xfT |? JE CO|= 711 + Exfay a apro ($8.11) arg (E 0) = arc tan afT -2r1T (8.110) Resulta, pues, que la amplitud no es plana, y el retardo no cs constante (figura 8.6b). Se concluye que para valores de T grandes es mejor la extrapolación de or- Reconstrucción de señales: extrapolación 319 la siguiente tiene una pendiente igual a k veces la diferencia entre las muestras precedentes, siendo O < k < 1. Su interés se deduce observando las figuras 8.5b y 8.6b: si el módulo de la respuesta frecuencial de una retención de orden coro tiene una atenuación excesiva a baja frecuencia, y en cambio el de una retención de pri- mer orden tiene un sobreimpulso, cabe esperar que una retención de orden frac- cionario dé una respuesta plana, próxima a la de un filtro de paso bajo ideal. La respuesta imputsional de un extrapolador de orden fraccionario se muestra en la figura 8.7, Su expresión analítica es mo = [eE LJ. 1 20) = 7 u(0- (1 +k] u(t- Yo le Ta de + ku(t-27) + + [1-27] u(t- 27) (812) donde u(+) es la función escalón (nula para 7 < 0; 1 para £ > 0). (Para evitar confu- sienes, en la ecuación 8.12 se han empleado corchetes para encerrar los factores de los productos; los paréntesis sólo se han empleado para encerrar la variable in- dependiente.) La respuesta frecuencial se puede calcular por ejemplo mediante la transformada de Laplace, y se obtiene % e Rar RA ART HAD = (Uk 27 (1- em (8.134) Esta expresión se puede poner en función de la respuesta trecuencial de un extra- polador de orden cero. Hoff). y de uno de primer orden, A.(f, BAD) = (Uk e A — Lp (8.13b) Ñ 1+2xfT El módulo y la fase de esta expresión para distintos valores de k, están com- prendidos entre los correspondientes a la extrapolación de orden cero (£ = 0) (fi- gura 8.5b) y a la extrapolación de orden 1 (k = 1) (figura 8.6b). Para k = 0,3 la armm- Plitud es casi plana con la frecuencia, en la banda de paso. a) 1 Ml o Jn Figura 8.7. Extrapoleción de orden fraccionario: respuesta impulsional. 320 La etapa de salida en la distribución de señales 8.3.4 Extrapolación exponencial Si en la respuesta frecuencial de un extrapolador de orden ceso (ecuación 8,64) sustituimos cl seno por su forma exponencial, obtenemos 1 ¿Am HA) == 0 Raf (8.L4a) Dat Si ahora sustituimos € por los dos primeros términos de su desarrollo, queda 1 1 1 Hp =——— A A 4) Pal ( e 7) Raf ( L+ e) 1+2nfT A (8145) que la definimos como respuesta de un cxtrapolador exponencial. La razón de nt) sit $ hast) 1 A t t T 21 ta) 1H T log f DAT YT 27 argíHaf) trad log F -0.56 An 16) Figura 8.8. Extrapoteción de orden fraccionario. ta) Respuesta impulsiona!, (b) Módulo y fase de la respuesta frecuencial. 322 La etapa de salida en la distribución de señales STRoSES STROBES 1000 0019 y 1000 0) min 0 ooo mo mn da Tionsitoro e aa acento del margen la) 1b) STROSES od STRoBES 1000 a TW e 00 ra 1000 (000 mam ñ om A o a de) Idi Figura 8.9. (a) Transitorios a la salida de un CDA. (6) Distorsión producida por un filtro lineal aue pretenda reducir los transitorios. (c) Salida de un CDA diseñado para producir transitorios de salida pequeños. (d) Empleo de un amplificador de seguimiento y retención (S8H) para re- ducir los transitorios (1). Otro método de reducción de transitorios, más al alcance del diseñador del sis- tema, consiste en disponer un amplificador de seguimiento y retención (track and hold) a la satida del CDA, temporizado de forma que retenga el valor de salida cuando se actualiza la entrada del CDA, y no pase a la fase de seguimiento hasta que se hayan extinguido los transitorios (figura 8.94). Este método conlleva una reducción en la máxima velocidad de actualización de la entrada del CDA, y esto hay que tenerlo en cuenta especialmente cn sistemas multicanal donde se com- parte un único CDA de salida. Este amplificador S£H para reducción de transitorios no debe confundirse can el de reconstrucción de la señal mediante retención de orden cero (caso de un CDA sin registro de entrada). El S£H de reconstrucción debe tener una adquisi- ción rápida y permanecer la mayor parte del tiempo en estado de retención. El S£H para reducción de transitorios («deglitcher») está la mayor parte del tiempo en estado de seguimiento y sólo está en estado de retención durante el tiempo de establecimiento del CDA, £,. después que haya cambiado su código de entrada. El efecto de este SK H en el espectro de la señal de salida, se estudia conside- rando que su tiempo de adquisición viene determinado por una constante de tiempo 7= RC, que se introduce adrede para evitar las distorsiones que produciría la limitada velocidad de cambio (slew rate) del AO de salida del SéH, si su en- trada cambiara rápidamente (figura 8.10). Las componentes espectrales resultan- tes de dicha no linealidad, son un problema en sistemas de audio digital; pueden no serlo en sistemas de medida. Se demuestra |2] [3] que la respuesta frecuencia] total es men 9H — (8.16) AfT 1+2xf7 Salida de datos: bucles de masa y aistamiento optoelectrónico. 323 D=Y coa Cargo. 0 Figura 8.10 Aplicación de un amplificador de seguimiento y retención (S8H o T8WH) a la re- ducción de transitorios a la salida de un CDA (que incluye un registro de entrada). donde es fácil identificar el primer factor como correpondiente a la retención de orden cero y duración T' (en el CDA); y el segundo factor como correspondiente al efecto integrador de la red RC. El tercer factor mucstra el efecto do la reten- ción durante £, y seguimiento durante el resto del liempo hasta 7. Si fuera 1, = Y, quedaría sólo el efecto de la retención de orden cero en el CDA, seguida de un fil- tro de paso bajo RC, Si fuera 7= 0, tendríamos sólo el efecto del CDA con reten- ción (registro de entrada). 8.5 SALIDA DE DATOS: BUCLES DE MASA Y AISLAMIENTO OPTOELECTRÓNICO Cuando en un SDS hay que conectar el procesador central a elementos que no estén alimentados por su misma fuente de alimentación, hay que prever la existen- cia de diferencias de potencial importantes entre los terminales de referencia (masa) respectivos. La situación es similar a la descrita en la adquisición de seña- les (apartado 3.2.3, figura 3.5), con una salvedad importante: mientras las señales procedentes de los sensores suelen ser analógicas, las de salida de los procesado- res son inicialmente digitales y la comunicación con otros sistemas se prefiere que sea también en forma digital, entre otras razones por su mayor inmunidad a las in- terferencias. Se habla entonces de transmisión de datos. La inmunidad a interferencias en la transmisión de datos se logra por una parte eligiendo adecuadamente un código (incluyendo bits de paridad) y cl tipo de transmisión (síncrona, asíncrona); y por otra parte eligiendo la norma que tenga unas características eléctricas adecuadas al entorno: margen de ruido y tipo de línea (unipolar, diferencial). A nivel de realización física, el empleo de cables apantallados y la disposición de las tomas de masa, confieren mayor iumu- nidad. Salida de datos: bucles de masa y aistamiento optoclectrónico 325 Dado que en un gP la comunicación entre la CPU y sus periféricos se hace vía un bus (sistema paralelo), en la transmisión serie en sistemas basados cn uP hay que convertir la información paralelo en información serie y viceversa. Esta con- versión se realiza mediante dispositivos designados genéricamente como USART (Universal Synchronous/Asyuchronous Receiver Transmitters), como el Intel 8251A PC] (Programmable Communication Taterface) y el Zilog 8530 SCC (Se- rial Communications Controller). Hay modelos que sirven sólo para la transmi- sión asincrona (UAR'T) o síncrona (USK'P). Los USART son dispositivos con entradas y salidas compatibles TFL y. por lo tanto, no pueden ser conectados directamente a las líneas de comunicación por- que no tienen los niveles de tensión, corriente y potencia necesarios. Hacen falta, pues, generadores y receptores de línea. Los diversos modelos comercializados es- tán previstos para cumplir las diferentes normas de transmisión. En la tabla 8.2 se resumen las características principales de las tres interfaces que hasta el momento han alcanzado un mayor uso. La norma ElA R5S-232 fue introducida por la EIA (Electronics Industries As- sociation) en 1962 para concetar un ordenador a un modem, pero actualmente se emplea para todo tipo de interconexiones, hasta el punto de haberse convertido en el arquetipo de las interfaces serie. (Se llega incluso al extremo de designar como «RS-232» la interfaz de algunos sistemas por el mero hecho de ser una inter- faz serie, a pesar de no cumplir dicha norma.) La versión EIA RS-232-C fue intro- ducida en 1969; la versión FIA RS-232-D, es una revisión de la versión anterior, TablaS.2 Caracteristicas básicas de las interfaces ElA-RS-232-D, ElA-RS-422 y ElA-R5-423, Parámetro EIA RS-232-D ElA AS-422-A ElA RS-423 Tipo de linea Unipolar Diferencial Unipolar Número de generadores 1 generador 1 generador 1 generador y receptores en una linea % receptor 19 receptores 10 receptores Longitud cable máxima 12.500 pF) 1.200 m 1.200 m Velocidad máxima para la longitud máxima 20 kbit/s 100 kbit/s 10 kbitís Velocidad máxima y 20 kbit/s 10 Mbits 100 kbit/s longitud aceptable 15m 12m 12m Tensión salida máxima del generador +25V -0,26a6V +6v Nivel de señal del generador — con carga +5V =2V +36 — en vacío =15V = 5V +6v Impedancia de carga generador 30a7kQ 100 2 450 Q min Corriente salida máxima testado alta Impedancia) Vana:(300 2 2100 yA + 100 A Velocidad de señal 30 V/ps - controlable Tensión entrada receptor H15V Tar TV 12V Sensibilidad de entrada del receptor +3V = 200 mv + 200 mv Resistencia de entrada del receptor 3a7kQ >4kQ > 4 326 La etapa de salida en la distribución de señales aprobada en 1986, y que introdujo sólo ligeros cambios. Esta norma se refiere a la interconexión de un equipo terminal de datos (ETD) (conector macho), por ejem- plo un ordenador, una impresora, o un terminal de entrada, y un equipo de lermi- nación de un circuito de datos (ETCD) (conector hembra), por ejemplo un mo- dem o un ordenador. Cuando cl ETCD no es un modem, la especificación de la función de cada línea es genuina de cada fabricante. Se aplica tanto a comunica- ciones serie síncronas como asíncronas, tanto en comunicaciones punto a punto como multipunto (varios equipos comparten el mismo medio), y tanto en líncas privadas, como cn líneas conmutadas, sean de dos o cuatro hilos. En la norma ElA R$-232-D, ninguna tensión en ningún contacto del conector debe exceder + 25 0-25 Y (muy superior, pues, a los + 5 Y propios de un sistema TIL). Cualquier contacto debe resistir un cortocircuito con cualquier otro con- tacto sin sufrir daños ni él ni cualquier otro equipo. Cuando la carga es de 3kQ a 7 KG, la salida «0» del generador viene representada por una tensión entre +3 y + 15 V, y la salida «1» viene representada por una tensión entre — 5 y - 15 V. En el receptor, una tensión entre — 3 y + 15 V representa un «()», mientras que una ten- sión entre — 3 y — 15 V representa un «1». Las tensiones entre + 3 y — 3 Y corres- ponden a la zona de transición, y no están definidas. En la figura 8.12 se presenta la relación entre niveles de tensión y señales («0» y «1»). Obsérvese que se puede tolerar un margen de ruido de 2 V sin que se produzca error alguno a la entrada del receptor. Solida Entroda a +15 or :0 espacio espacio 5Y CERRADO] CERRADO TT E + av III TA LIMA AREA 7 R TARTA -3Y y A marco marca ABIERTO: ABIERTO A5V ¡A ERA Figura 8.12 Características eléctricas de las señales en la norma ElA RS-232-D. Las zonas ra- yadas son las de transición. La longitud máxima permitida para la línea, que cra de 15 m en la versión ELA R5S-232-C, no está especificada directamente en la versión D. Se especifica sólo la capacidad máxima de la carga, que debe ser inferior a 2.500 pF. Según cl tipo de cable y la velocidad de transmisión, se podrá alcanzar una distancia mayor o me- nor. Dado que con generadores (drivers) TIL no se pueden cubrir líneas con más de unos 7U cm, hay que emplear generadores y receptores de línea especiales. La velocidad de las señales está limitada a 30 V/gs por razones de diafonía entre con- ductores cn un cable multifilar. Las señales no deben permanecer en la zona de transición ni más de 1 ms, ni más del 4 % de su duración.