Vista previa parcial del texto
¡Descarga EE3409 y más Apuntes en PDF de Ingeniería Marina solo en Docsity!
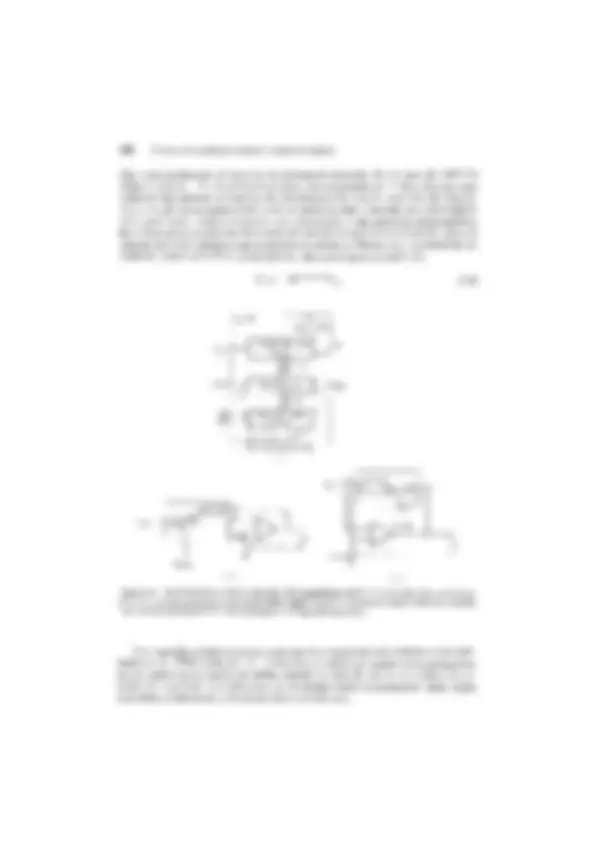
Capítulo 6 Conversión analógica/digital y digital/analógica Un convertidor analógico-digital (CAD) es un dispositivo que ofrece una sa- lida digital a partir de una señal analógica de entrada. Realiza, pues, las funciones de cuantificación y codificación. May modelos que incluyen un muestreador pre- vio (sampling converters). otros incorporan un multiplexor analógico, y aún otros incluyen los dos. Un convertidor digital-anatógico (CDA) realiza el proceso in- verso. Ambos dispositivos son inherentemente no lineales. Para el usuario de SADS, el CAD y el CDA son elementos clave que determi- nan el límite último de precisión que puede obtener. Para el diseñador de SADS, las características de los CAD y CDA justifican la necesidad de realizar determi- nadas funciones entre ellos y los sensores y actuadores. En ambos casos, cl interés está en la interprotación de las espcrificaciones y en el conocimiento de los princi- pios de funcionamiento básicos, más que en cl detalle de la estructura interna de los dispositivos. Aunque en la secuencia lógica dentro de un SADS Ja conversión A/D (en- trada) precede a la conversión D/A (salida), resulta que algunos tipos de CAD es- tán basados internamente en un CDA, por lo que conviene conocer primero la es- tructura de éste. 6.1 TERMINOLOGÍA Y ESPECIFICACIONES La figura 6.1a describe las dos funciones de un CAD: cuantificación y codifica- ción. Aunque la señal de entrada proceda de un Sé£H, su gama de amplitudes es continua. La salida X, de cada comparador C,, en cambio, tiene una de dos ampli- tudes (X¿, X,) según que la entrada exceda o no el umbral respectivo U; los um- brales se determinan a partir de una tensión de referencia conocida con precisión y estable. El codificador responde al conjunto de tensiones binarias de entrada mediante una palabra digital D, ;... D¡Dy en un código predeterminado. 256 Conversión analógica/digital y digital/analógica Comparaderes + Xy Co Ugo A x Ly C A E A Coarcom > bra -D1 06 + Xn-1 Ci Urrea X8 1 Cuantiticador 5] Sumador Lu 3 Dio Xa 5 19) Figura 6.1 — (a) Modelo de las funciones de un CAD. (5) Modelo de la función de un CDA. Si los umbrales están equiespaciados, U,; — U,, = U¡- U,.,, la cuantificación es uniforme («lineal»), en caso contrario es no uniforme, Los niveles de cuantifica- ción se definen como las amplitudes equidistantes de cada par de umbrales. La figura 6.1b describe la función de un CDA. Cada uno de los bits D, de la palabra digital coutrola un interruptor para determinar si una entrada asociada X, contribuye o no a la salida. Dado que hay un número finito de bits, la amplitud de la salida analógica tendrá sólo un número finito de niveles. Si la separación entre niveles es constante, se dice del CDA que es uniforme. Si la separación depende de la amplitud de la salida, se dice que cl CDA es no uniforme, Las entradas X, son un conjunto finito de tensiones o corrientes que guardan una relación entre sí, y que se obtienen a partir de una tensión de referencia de precisión y estable. Las especificaciones de los CAD se pueden dividir entre las relativas a su en- trada, las relativas a su salida. y las que describen la relación entrada-salida, aparte de las especificaciones generales como subsistema (consumo, alimentación, características ambientales, etc.). — Características de entrada. De la cntrada interesa cl número de canales (normalmente uno), el tipo de señal (tensión o corriente), su margen de valores: máximo y mínimo, y su polaridad (unipolar, bipolar —con signo—). Los termina- 2588 Conversión analógica/digital y digitalanalógica Solido Fracción Código E VB 14 J 3/4 6/8 110 ñ 5/8 101 ! Transició: (a 1/24/8 100 deal : 38 0 l Vator romina | ” cuontificado | 14 Y8 0% ppiise | 1212ts80 1 1/8 001 , se | Entrada onalógica 9400] ve] oe | wafere | alma cantficado lideatmente 0— 000 ÍFELFE RA op rEJrz Mee See dee FE pe fre dee re FE | ! I ! (o) te o Error de ono sanan 00 00. 0 ve 42 34 FE Cdigos AS + 10 i y O, (a el on l 010, J El ! 000, J Do 12 34 FE DM 012 a FE Figura 6.2 Errores en un CAD con cuantificación uniforme. (a) Curvas de transferencia teó- rica € ideal, (b) Error de cero. (e) Error de ganancia. (a) Error de linealidad. (e; Pérdida de códi- gos. (Documentación Analog Devices, Inc). La exactitud viene especificada mediante el error total, que es el valor máximo de la suma de todos los errores, incuido el de cuantificación, y pucde expresarse como error absoluto o como error relativo. El error absoluto es la diferencia entre el valor de la entrada equivalente al código de salida actual y el valor de la en- trada real, Se da en unidades de tonsión, El error relativo es el cociente entre el error absoluto y la tensión analógica de entrada. Se sucle expresar en términos de ESB (bit menos significativo). Según su dependencia respecto a la entrada, se dis- tinguen varios tipos de error, cuyas fuentes suclen ser también distintas (11. e Error de cero El error de cero (ofíset, zero offset error), figura 6.2b, es el valor (analógico) de la diferencia entre la curva de transferencia real y la ideal, en ausencia de otros > al Terminología y especificaciones errores (salvo el de cuantificación). Su presencia implica que la primera transición no se produce exactamente en + 1/2 LSB, de modo que la curva de transferencia real está desplazada horizontalmente, Se expresa en milivoltios, o como porcen- taje del fondo de escala. El error total es entonces el de cuantilicación más dicha tensión de desplazamiento. Algunos CAD integradores (apartado 6.3) tienen una fase de corrección de cero en la que el error de cero de entrada se ajusta «a cero mediante un lazo de realimentación. * Error de ganancia El error de ganancia (slopc error, gain error, scale factor error), es la diferen- cia entre la pendiente de la curva de translerencia real y la ideal, en ausencia de otros errores (salvo el de cuantificación). Suele expresarse en tanto por ciento para una entrada igual al Condo de escala. Su presencia conlleva una rotación de la curva de translerencia real alrededor del origen (figura 6.2c). Tanto el error de cero como el de ganancia se pueden corregir mediante calibración, a una tempera- tura y en un momento determinados; sus derivas se pueden corregir mediante cali- bración repetida en dos puntos. e Error de no linealidad El error de no linealidad es la máxima diferencia entre la curva de transleren- cia real y la ideal cuando los errores de cero y de ganancia son nulos (figura 6.24). Fs un crror que no se puede corregir. Se expresa como porcentaje del fondo de escala, o como fracción de LSB, y suele valer 1/2 LSB. Se denomina también linealidad «integral» porque indica el error que se tiene en una determinada pala- bra de salida. con independencia de las demás. A veces el error de no lincalidad no se expresa con respecto a fa curva de transferencia ideal sino respecto a otras. Si se expresa con respecto a la cut- va de transferencia obtenida al girar o desplazar la actual de tal manera que cl error de cero sea nulo, se habla de error de linealidad referido al cero, Si se cx- presa con respecto a la curva de transferencia obtenida al girar o desplazar la actual de tal manera que pase por los puntos extremos de la característica ideal, se habla de error de linealidad terminal. * Linealidad diferencial La lincalidad diferencial o incremental es la diferencia entre cualquier inter- valo de cuantificación real y su valor analógico ideal (FE/2”). Si la amplitud de los intervalos de cuantificación adyacentes no es la misma, entonces la pendiente «media» de la curva de transforencia no es 1, se pueden perder códigos (cuando este error es mayor que un intervalo de cuantificación, figura 6.2e), y la curva de transferencia puede devenir no monótona (con pendiente negativa), aparte de producir un error de ganancia. — Características de salida. Número de salidas Corriente de salida — Características de transferencia. Error de cero —= A25SC — De-40*C 285€ Error de ganancia — ADC — De-40"Ca85C — Coeficiente de temperalura No lincalidad integral No linealidad diferencial Tiempo de establecimiento de la salida dentro de 1/2 LSB, con 100 £ carga Convertidores DIA 2 (complementarias) Depende de Ja tensión de referencia 2 0,02 LSB máximo + 0,5 LSB máximo + 1LSB máximo 22 LSB máximo 15 x 10 PC máximo + 1/2 LSB máximo 11/2 LSB máximo 0,25 jus máx. (no verificado) 261 En las tablas 6.1 y 6.2 se resumen, respectivamente, los parámetros básicos a considerar cn la selección de un CAD y de un CDA. Tabla 6.1 Parámetros básicos a considerar en la selección de un convertidor A/D. — Número de canales — Tipo de canates (unipolares o diferenciales) — Margen de la tensión de entrada — Resolución (en número de bits) — Exactitud — Tensión de referencia necesaria — Velocidad: frecuencia de conversión — Formato de la señal de salida tbinario, complemento a dos, ...) — Control de la conversión (interrupciones, verificación de estado, ...) — Funciones adicionales a la entrada (muestreo, multiplexado, ganancia programable, entra- das de bajo nivel) — Funciones adicionales a la salida tcerrojos) — Condiciones ambientales 6.2 CONVERTIDORES D/A Un CDA lineal (uniforme), con código de entrada binario puro, obtiene a par- tir de una palabra digital de q bits, D,, ¡D,.>... D,Dg, 2” niveles discretos de ten- sión o corriente, según la relación Vo =VidlDy ¡2 + Dy 227. ED 2D") (6.1) 262 Conversión analógiculdigital y digitaVanalógica Tabla 6.2 Parámetros básicos a considerar en la selección de un convertidor D/A. — Número de canales — Código de entrada — Niveles de tensión de entrada — Formato de la entrada (serie, paralelo) — Margen de tensiones o corrientes de salida — Resolución ten número de bits) — Exactitud — Velocidad: tiempo de establecimiento — Funciones adicionales a la salida — Condiciones ambientales donde V, es el valor de [ondo de escala. El valor máximo de la salida no es Vpg sino 2-1 Vemox = Vr (6.2) Cuando la tensión de referencia a partir de la que se determina el intervalo de cuantificación no es interna sino cxterna, se dice del CDA que es de tipo mul- Giplicador porque multiplica la entrada de refcrencia (analógica) por la entrada di- gital. Los CDA más comunes son de tipo paralelo y su cstructura general se indica en la figura 6.34. Hay una interfaz digital que adapta el nivel lógico de entrada al requerido por los interruptores, y, en el caso de los modelos denominados «com- patibles con ¿4P», retiene el número a convertir durante el tiempo que dura su conversión. El AO de salida convierte la corriente en tensión, y en el casa de CDA rápidos suele ser externo. La presencia de un AO interno aumenta inevita- blemente el tiempo de establecimiento de la salida. La resistencia R,, sin em- bargo, es preferible que sea interna al dispositivo, pues de esta forma cstá apa- reada térmicamente con las resistencias del convertidor, que determinan su resis- tencia de salida. Los tiempos de conversión obtenidos van desde más de 100 us en modelos lentos hasta menos de 100 ns en modelos ultrarrápidos. La resolución es- tándar es de 12 bits, pero abundan los modelos de 16 y 18 bits, y los hay ya dispo- nibles de 20 bits para aplicaciones de audio. Todos los CDA donde la corriente contribuida por la conmutación de cada uno de los bits es independiente, presentan en mayor o menor grado transito- rios (glitches) en su salida debidos a la falta de simultancidad en las conmuta- ciones, pues los ficmpos de paso a corte y de paso a conducción son distintos. La amplitud del transitorio se especifica como producto de tensión o cotriente por tiempo [«V - ns» o «mA - ns»]. Si a la salida bay un AO, su limitada velocidad hace que el transitorio observado a la salida sea menor que el interno, pero aún sigue siendo importante. Este es un problema a abordar en la distribución de se- ñales. 264 — Conversión analógica/digital y digital/analógica Los principales inconvenientes de esta estructura derivan del gran margen de valores de las resistencias cuando la resolución deba ser alta. Esto por una parte dificulta el apareamiento térmico y, por otra, dado que la menor de las resisten- cias debe ser mucho más alta que la de! interruptor, lleva a un valor muy grande para la resistencia mayor, con lo que aumentan los tiempos de conmutación. Ade- más, la tolerancia en la resistencia mayor debe ser muy estricta y esto encarece su fabricación. Ejemplo. Calcular la tolerancia en la resistencia correspondiente al MSB en un CDA de resistencias ponderadas para que el error debido a dicha tolerancia sea inferior a 1 LSB cuando la resolución es de 8, 10, 12 y 16 bits, Para un convertidor de a bits, si el valor de la resistencia asociada al LSB es 2R, enton- ces la resistencia asociada al MSB es 2%R, Si llamamos «Y a la tolerancia total, descamos que se cumpla CUR<2ZR a<112 Emspleando los datos de la tabla 4.1, si 1 = 8, 2 < 0,78 %; sin = 10, 1 < 0,19 % 0 < 0,048%: y si = 16, a < 0.0015 %. 6.2.2 Convertidores D/A de resistencias en escalera El circuito de la figura 6.3c tiene una rod de resistencias en escalera, con sólo dos valores: R y 2R. La corriente de salida es la suma de las que fluyen a través de cada resistencia de valor 2R controlada por los distintos bits. Cuando el extremo inferior de cada rama en paralelo está a O V (masa, «0» lógico, o masa virtual, «1» lógico), al ir de izquierda a derecha la corriente se va dividiendo por 2 a cada nodo. Con esta disposición de interruptores dobles, la carga que ve la fuente de tensión de referencia es R, con independencia de la palabra de entrada, Por esto a veces se habla de corriente de referencia, 1, = VR. Algunos modelos tienen dis- ponible en un terminal Ta corriente de salida complementaria, es decir, la corres- pondiente a la palabra digital complementaria de la aplicada a la entrada. Si una de estas dos corrientes no se utiliza, hay que derivarla a masa. Ejemplo. Un determinado CDA de 8 bits con entrada en binario natural y salida de co- niente y la complementaria, utiliza una corriente de referencia de 2 mA, que es ademnás la máxima que puede suministrar a su salida. ¿Cuál es la salida de corriente en cada terminal cuando la palabra de entrada es 1111 1111? ¿Y cuando es 1000 6000? Aplicando (6.2), en este caso la corriente correspondiente a 1111 1111 < 255d será 281 Vamos =L 2 =2 MA 2 Convertidores D/A 265 La corriente complementaria es entonces nula. Cuando la entrada es 1000 0000 = 128d la corriente de salida será 128 1¿=2mA —— = 1,0000 mA 256 La entrada complementaria es 0111 1111 = 127d y la corriente asociada es 7,=2 mA —=0,9922 mA 127 256 La suma de cstas dos corrientes da efectivamente 1,9922 mA. En ningún caso se llegan a obtener los 2 mA. Dado que en esta estructura hay sólo dos valores de resistencia distintos, la exactilud y el apareamiento térmico son mejores que con la red ponderada, y la velocidad es mayor. El precio pagado cs que ahora sc emplean dos resistencias por cada bit. Esta configuración, con distintas variantes en cuanto a la conmuta- ción e inyección de corriente, es la preferida. La precisión obtenida en la fabrica- ción de condensadores MOS con una relación de valores determinada, permite fabricar actualmente CDA basados en redes de condensadores en vez de resisten- cias. En los modelos con salida de corriente y resolución elevada, si se obtiene una salida de tensión mediante un AO externo, los errores de éste contribuyen a la sa- lida directamente, y pueden superar con creces a los errores del CDA. La elección de dicho AO debe ser, pues, muy cuidadosa. Ejemplo. El PM-7572A es un CDA de 12 bits con salida de corriente y cuyas especifica- ciones básicas se han dado en el apartado 6.1. Su resistencia equivalente de salida de- pende del código digital de entrada y cs k, = 10 kQ cuando en la palabra de entrada hay más de 4 bits que son «]» y es R¿= 30 kQ cuando uno solo cualquiera de los bits de en- trada es «1». Para obtener un tensión de salida de 10 V a fondo de escala se emplea un es- quema como el de la figura 6.3c, con una tensión de referencia de + 10 Y. Determinar la tensión de desequilibrio (offset) aceptable en el AO para que el error de cero cuando la entrada es 0000 0001 1111 y cuando es 1000 0000 0000, sea inferior al error de cero del propio CDA. La tensión de salida debida a la tensión de desequilibrio v,, del AO es (4) 1,(0) = Ms | 1 + R, Para tener una tensión de fondo de escala de 10 Y cuando la referencia es de 10 Y hará falta que R, sea Y, 10 V e A VR, 10 VIOKQ Convertidores D/A 267 código de entrada 000 ... O, se puede emplear directamente un CDA uniforme («lineal») para obtener 2* — 1 valores de atenuación o ganancia. Ahora bien. la separación entre los valores de atenuación obtenidos es muy dispar, porque mientras Ja adición de 1 bit implica un margen de atenuación adi- cional de 20 log(1/2) = — 6 dB, sucede que cuando cl número de bits es alto hay muchos códigos intermedios, lo que implica muchos valores de atenuación inter- medios; en cambio, cuando el número de bits es pequeño hay pocos códigos dispo- nibles, Ejemplo. Determinar la amplitud de los pasos de atenuación de un CDA uniforme de 8 bits, expresándola en decibelios. El margen de valores de atenuación que se puede obtener es 2 log (2-1) =484B Cuando la entrada es 1111 1111 = 255d, 0=-—0.034 dB. Cuando la entrada es 1000 0000 = 18d, a: =- 6 dB. En el extremo opuesto de la oscala, cuando la entrada es 0000 0010 = 2d, 4=- 42,14 dB, y cuando la entrada es 0000 0001 =1d. 2=-48,16 dB, Resulta, pues, que mientras entre — 0,034 dB y — 6 dB se pueden elegir 255 - 128 = 127 valores distintos, en cambio entre — 42,14 dB y - 48,16 dB no se puede elegir ningún valor de atenuación intermedio. Es decir, para las atenuaciones altas el paso de atenuación es de - 6 dB, mientras que para las atenuaciones más bajas es de — 0,034 dB. Para tener un paso de atenuación constante, cuando se expresa en decibelios, hay que elegir cl código disponible que dé el valor más próximo al de la atenua- ción deseada. En general, con a bits se puede obtener un margen de atenuación de 6n dB. Si deseamos 2” valores de atenuación equiespaciados, bastarán m bits. Un CDA logarítmico permite obtener uno de 2m valores con una resolución 4er constante en todo el margen de atenuaciones y mejor que la correspondiente a un CDA de em bits, es decir [A] < 20 log (1 - 27”). El AD7111 (Analog Devices), por ejemplo, permite seleccionar con una palabra digital de 8 bits, uno cualquiera de 240 valores de atenuación entre O y — 88,5 dB, con una resolución de 0,375 dB [2]. Si en la ecuación 6.4b empleamos Va en vez de Veg, su salida se puede expresar como | A ES donde N cs el valor decimal del código de entrada y 0 < N < 239. Para 240 Entrada ad l 3 E> L-—07 (M8) N g Lope b EP>-— il] Los R q27 EPA, Larcn 00% nm codifica er vo Losas REFM € 25508 28 2 PESE] Buren], R $] —om a DO IL5B) fa) E e] caprino e arnes] 04 —oApara a pe “Aly 9—] Amptificado:| Deux CLK o—— track-hoto ROBE” STROBE. ke] > E =DeLk cs A a EA paralelo LAICHES BnarA p 16) REF + CAD => d bit Z a poor TW REF dalla T aras Hosts ña í Lotehs cAD E Salida ábits y pe» digital UD si bufters os se ls [08 Ñ cólelo o A o E Dnuesos enciós = MODO Tem pora ergo y om Ro control ted Figura 6.5 fa) Diagrama de bioques del convertidor paralelo TLC5502 (Texas Instruments Inc.). (6) Aumento de la velocidad mediante dos CAD controlados por relojes de distinta fase (TKAD10C, Tektronix). (c) Aumento de la resolución, a costa de menor velocidad, mediante un sistema de dos etapas (Texas Instruments Inc.). manteniendo la resolución, cs mediante dos CAD en paralelo controlados por se- ñales de reloj en contrafase (figura 6.5b). i se desca aumentar la resolución, a costa de perder velocidad, se puede em- plear un sistema multictapa, o con subdivisión de escala (subranging), tal como se indica en la figura 6.5c. Consiste en emplear dos codificadores paralelo rápidos, de Convertidores A/D 2n 4 bits en este ejemplo; al primero se aplica directamente la entrada, y da los bits de salida de mayor peso; al segundo se le aplica la diferencia entre la entrada, re- tardada un cierto tiempo, y la salida de un CDA que obticne el equivalente analó- gico de los (4) bits de mayor peso. Las salidas de ambos codificadores se combi- nan para dar la salida total, de 8 bits en este caso. Con este método se obtienen hasta 40 x 10% conversionesís con 16 bits. 6.3.2 Convertidores de aproximaciones sucesivas El algoritmo de aproximaciones sucesivas ofrece un buen compromiso entre velocidad y complejidad, y es el más frecuente cuando no se trata de obtener una exactitud muy etevada. Hay muchos modelos de 8, 10, 12, 14 y 16 bits, con tiempos de conversión entre 1 y 100 us. En la figura 6.64 se muestran los elementos básicos de un convertidor de este tipo; para facilitar la interfaz con un 4, las líneas de sa- lida se conectan a separadores de tres estados. Se puede montar con componentes discretos, pero su coste supera el de muchos de los CI disponibles. El método consiste en ir comparando la tensión de entrada cou una tensión analógica generada internamente con un CDA, cuya entrada digital se incrementa o decrementa según que el resultado de la comparación indique, respectivamente, que la tensión de entrada es inferior o superior a la tensión generada interna- mente. En la figura 6.6b se muestra cómo se van asignando los bits de salida en función del resultado de la comparación. Al empezar la conversión se aplica al CDA una entrada 10 ... 00, y luego se van probando los bits de menor peso. Los errores del CDA pueden llevar a no linealidades. El tiempo de conversión aumenta al hacerlo la resolución deseada, pero es in- dependiente de la amplitud de la entrada. El límite actual es de unas 10 conver- siones/s para 12 bits. Dado que el resultado de una comparación no se fija en el re- gistro de salida hasta que llega el ciclo de reloj siguiente a aquel en el que se ha efectuado la comparación, si la frecuencia de reloj es f,, el tiempo de conversión para n bits es Entiadoa CDA Vier 105 Enea La ds A salido ra ms E a pS j vz Z Registro Aproximac, Sucesivos analógica 1 Ñ Reloj bits de salida 1 ¡01110111 Entcada lo) lb Figura 6.6 (a) Esquema simplificado de un CAD basado en el algoritmo de aproximaciones sucesivas. (b) Asignación de valor a los bits de salida en comparaciones sucesivas. Convertidores A/D 273 6.3.4 Convertidores sigma-delta Conocidos también como convertidores delta-sigma, convertidores de 1 bit y convertidores con sobremuestrco (oversampling converters), se están convir- tiendo en los favoritos para aplicaciones de alta resolución a frecuencias bajas y medias. Constan (figura 6.8) de un modulador analógico y de un circuito de fit- trado digital y diezmado (4]. El modulador analógico convierte la señal de entrada ca una salida de dos niveles (1 bit) y alta velocidad (de aquí el «sobremuestreo»), y consta de uno o varios integradores, un comparador cuya salida se almacena en un cerrojo, y un CDA de 1 bit (o más en algunos modelos). El circuito sustrae (de ahí la «delta») la salida del CDA de la entrada analógica e integra (de ahí la «sigma») el resultado. La salida del integrador se compara con cero a alta veloci- dad, de modo que se tiene una secuencia de unos y ceros a alta velocidad. El CDA en el lazo de realimentación intenta mantencr la salida del integrador próxima a cero; puede ser una simple fuente de corriente. El filtro digital elimina el ruido de alta frecuencia introducido por el modulador analógico. El diezmador ofrece las muestras de salida a una velocidad menor de la disponible a la salida del compara- dor, pero con mayor resolución. Reloj Entrada + S onalégica PA poe [Eta atar n bits y ==> Salida A diezmador digital Comparador con cercojo CDA pl Figura 6.8 Estructura básica de un CAD sigma-delta. Sí la entrada cs, por ejemplo, positiva, la salida del integrador será también po- sitiva y el comparador generará una serie de «1» que el CDA convierte en una se- ñal que se resta a la entrada hasta el momento en que cl integrador da una salida nula; entonees el comparador da una seric de «0» a su salida. Cuanto mayor (más positiva) sea la entrada, más larga será la serie de «1» comparada con la de «0». Cuanto menor sca la entrada (más negativa), más larga será la seric de «0» res- pecto a la de <«l». Si la entrada es mula, a la salida del comparador se producen tantos «1» como «()». Una ventaja de este método es que es inherentemente lineal, porque se cm- plea sólo 1 bit en la cuantificación. Además, no hace falta S£H previo, ni ningún componente externo, y el filtro antialiasing puede scr muy simple por lo alta que es la frecuencia de muestreo con respecto a la frecuencia de la señal de entrada. Su principal inconveniente es que su tiempo de conversión va de decenas a cen- tenas de milisegundos. Se utilizan en aplicaciones de baja frecuencia (10 Fiz a 100 kHz), en particular audio y voz, con resoluciones de 16 a 21 bits. 274 — Conversión analógicaldigital y digisallanalógica 6.3.5 Convertidores de rampa: simple, doble, triple Un método de conversión totalmente distinto a los anteriores consiste en con- vertir primero la tensión de cntrada en atra magnitud, y después convertir esta magnitud en una salida digital. En los denominados convertidores de rampa, la magnitud intermedia es el intervalo de tiempo de carga o descarga de un conden- sador. En el caso de rampa simple, se integra la tensión de referencia hasta que la sa- lida del integrador iguala a la tensión de entrada. El tiempo que se tarda en llegar a esta situación depende de la magnitud de la tensión de entrada, y se mide con un reloj y un contador internos. La precisión depende de la frecuencia del reloj, de la estabilidad de la tensión de referencia y de la capacidad del condensador de inte- gración. Este proceso de integración hacia innecesario un amplificador S£H antes del CAD, En los convertidores de doble rampa (figura 6.94), se integra la señal de en- trada v,, constante, ca un condensador durante un tiempo prefijado T, y luego se descarga el condensador hasta cero, empleando una corriente conocida determi- nada por la tensión de referencia, V,. En la lase de integración, la tensión en el condensador alcanza un valor Lo v.=—| 1, di Todo donde T= RC es la constante de tiempo del integrador. La descarga hasta O V, em- pleando la tensión de referencia — V, para establecer la corriente de descarga, dura un tiempo ¿tal que (6.9a) Y, 0-1, (6.9») 1 fre -/ GV) di= Tyr De estas ceuaciones se obtiene v, t=T—— (6.10) Resulta, pues, que el tiempo que dura la descarga es proporcional a la ampli- tud de la entrada (figura 6.9h). Dado que el reloj con que se miden los tiempos y el condensador de integración son los mismos cn la lase de carga y en la de des- carga, su exactitud no influye en la precisión de la conversión, siempre y cuando permanezcan estables durante cl tiempo de conversión. La exactitud del converti- dor depende sólo de la tensión de referencia y de los errores de cero internos. Este método de conversión es inherentemente lincal. La repercusión de Jos errores de cero (integrador, comparador), se reduce in- troduciendo una fase de autocero al inicio de la conversión, previa a la integración de la seña! de entrada. En csta fase se cortocircuita la entrada a masa y se integran