



DISEÑO Y SIMULACIÓN DE UN SISTEMA DE
CONTROL MEDIANTE MÉTODOS DE ESPACIO
DE ESTADO
DISEÑO DE CONTROLADORES POR ASIGNACIÓN
DE POLOS CON REALIMENTACIÓN DE ESTADO

Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
INGENIERIA DE CONTROL AUTOMATICO II
Tipo: Resúmenes
1 / 17

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
ASIGNACIÓN DE POLOS MEDIANTE LA REALIMENTACIÓN DE ESTADO Sea el modelo de planta lineal e invariante con el tiempo que se describe mediante las ecuaciones de estado : 𝒙 ሶ 𝑡 = 𝐴𝒙 𝑡 + 𝐵𝒖(𝑡) 𝒚 𝑡 = 𝐶𝒙 𝑡 + 𝐷𝒖(𝑡) Donde: x(t) = vector de estado de dimensión n u(t) = vector de control de dimensión r. y(t) = vector de salida de dimensión m. A = matriz de estado de n x n. B = matriz de entrada de n x r. C = matriz de salida de m x n. D = matriz de transición directa de m x r.
11
1 𝑛
1
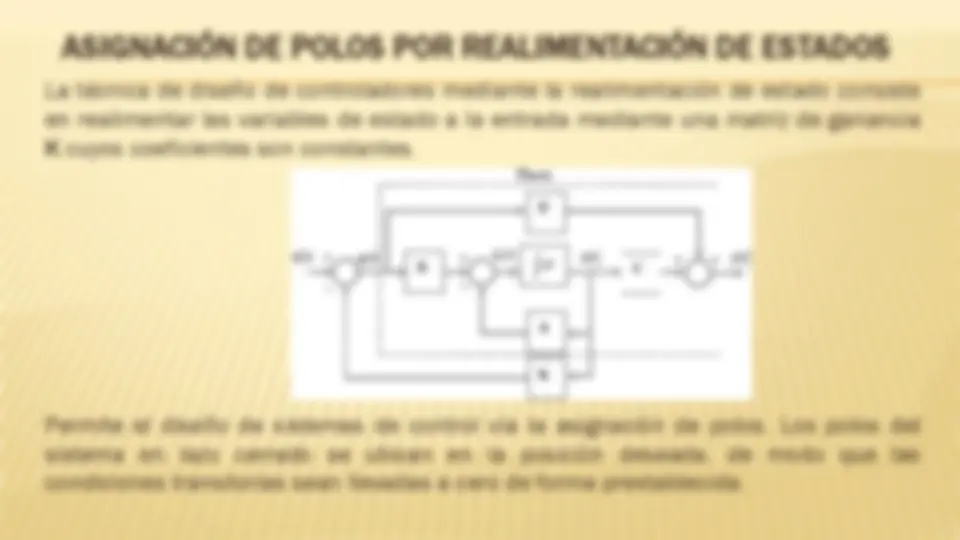
PROCEDIMIENTO GENERAL DE DISEÑO POR ASIGNACIÓN DE POLOS Sea pues el sistema regulador SISO de control por ubicación de polos mediante la realimentación de estado que se muestra en la figura: La planta está modelada por las ecuaciones de estado siguientes: 𝒙 ሶ 𝑡 = 𝐴𝒙 𝑡 + 𝐵𝒖(𝑡) 𝒚 ሶ 𝑡 = 𝐶𝒙 𝑡 La señal de control está dada por la relación: 𝑢 𝑡 = −𝑲𝒙 𝑡 + 𝑟(𝑡) en donde K = (k 1 k 2 … k n ).
……. Sustituyendo el valor dado de u ( t ) en la ecuación anterior y aplicando transformada de Laplace a las ecuaciones de estado con condiciones iniciales nulas, se tiene: 𝑿 𝑠 = 𝑠𝑰 − 𝑨 + 𝑩𝑲 − 1 𝑩𝑅(𝑠) 𝒀 𝑠 = 𝑪𝑿 𝑠 Sustituyendo X(s) en Y(s) y ordenando: 𝑌(𝑠) 𝑅(𝑠)
En donde Q(s) es un polinomio en s. Si las posiciones de los polos deseados son: s = p 1 , p 2 , … p n
la ecuación característica del sistema es: 𝑠𝑰 − 𝑨 + 𝑩𝑲 = 𝑠 − 𝑝 1
2
𝑛
Para calcular las ganancias desconocidas se iguala coeficientes en la última ecuación.
1
2
3
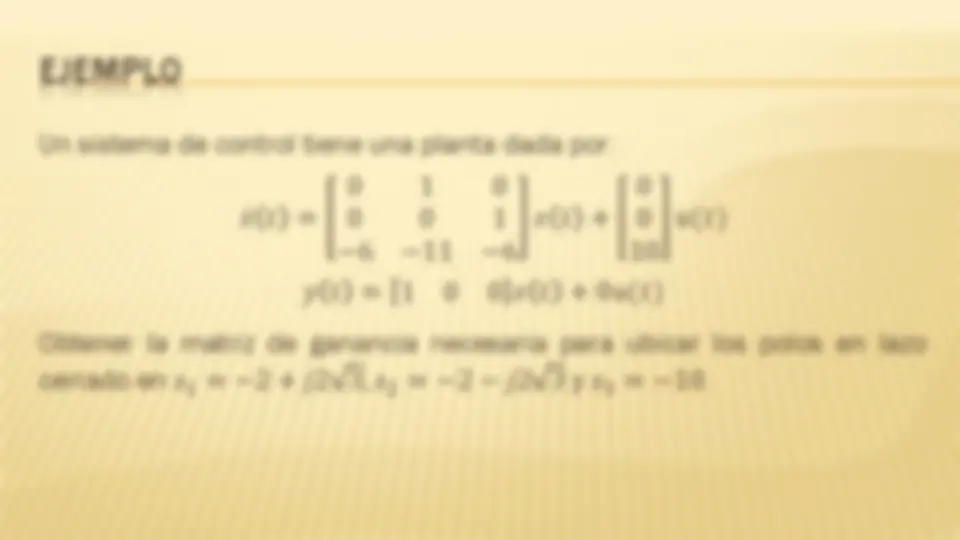
Comprobando controlabilidad 𝑀𝐶 = (^) 𝐵 𝐴𝐵 𝐴 2 𝐵 : 𝑀𝐶 =
det 𝑀𝐶 = − 1000 ≠ 0 El sistema es de rango 3. Por tanto, es de estado completamente controlable. La ecuación para el sistema es: 𝑠 0 0 0 𝑠 0 0 0 𝑠
1
2
3 = (𝑠 + 2 + 𝑗 2 3 )(𝑠 + 2 − 𝑗 2 3 )(𝑠 + 10 )
J. E. Ackermann presentó en 1972 una fórmula cuyo algoritmo tiene implementado MATLAB y se usa para determinar la matriz de ganancia K. Dicha fórmula es: 𝑲 = (^0 0) … 0 1 𝑩 𝑨𝑩 (^) … 𝑨 𝑛− 1 𝑩 − 1 Θ(𝑨) Θ(A) se determina del modo siguiente: Suponiendo que los polos en lazo cerrado se sitúan en 𝑠 = 𝑝 1 , 𝑠 = 𝑝 2 , … , 𝑠 = 𝑝𝑛, la ecuación característica deseada es: 𝑠 − 𝑝 1 𝑠 − 𝑝 2 … 𝑠 − 𝑝𝑛 = 𝑠 𝑛
𝑛
……
que implementa la fórmula de Ackermann.
La función acker está limitada a sistemas SISO y sólo se deberá usar para sistemas con un número de estados reducido. La función place no permite ubicar polos cuyo índice de multiplicidad sea superior al rango de la matriz de entrada B. La función place es más general y más robusta numéricamente hablando que acker.
En plataforma hay un foro de opinión que espera tu intervención mediante un comentario resumen de lo visto en el vídeo en no más de 100 palabras y no menos de 40. Use sus propias palabras. Use Matlab y resuelva el problema realizado en clase.