



DISEÑO Y SIMULACION DE UN
SISTEMA DE CONTROL MEDIANTE
METODOS DE ESPACIO DE
ESTADO
OBSERVADORES DE ESTADO





Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
INGENIERIA DE CONTROL AUTOMATICO II
Tipo: Resúmenes
1 / 28

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
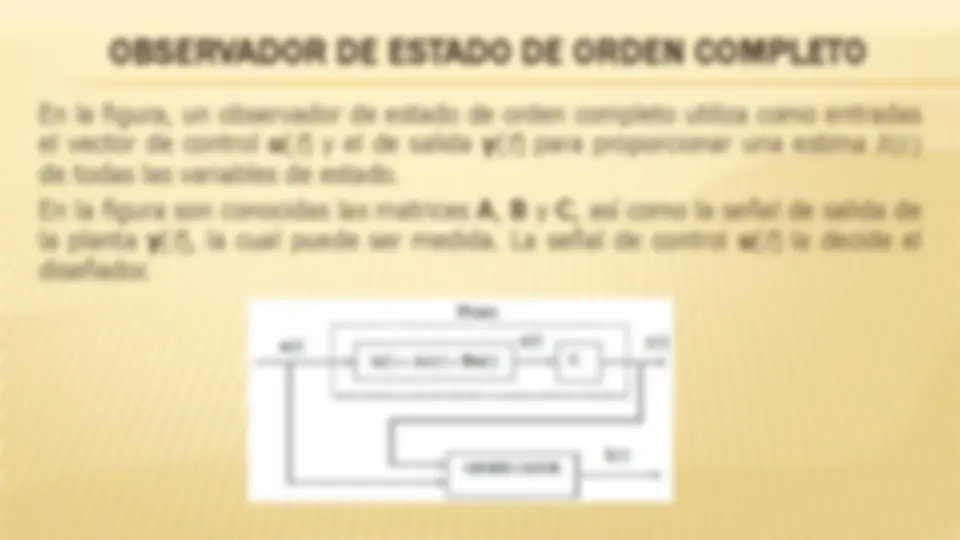
Un dispositivo (o un programa de computador) que estima u observa las
Si el observador de estado capta todas las variables de estado del sistema, sin
importar si algunas están disponibles por medición directa, se denomina
Un observador que estima menos de n variables de estado, donde n es la
TEOREMA.-
Dada la planta lineal, invariante y observable:
Se dice que el sistema definido por las ecuaciones:
0
0
0
Es un observador de estado del anterior si verifica las dos condiciones
siguientes:
0
, ෝ𝒙 𝑡
0
= 𝒙(𝑡
0
) ,
entonces los estados coinciden para todo instante posterior
ෝ 𝒙 𝑡 = 𝒙 𝑡 para
cualquier entrada u ( t) aplicada sobre el sistema.
ෝ 𝒙 𝑡 debe tender asintóticamente al estado x ( t) para cualquier entrada u ( t) y para
cualesquiera estados iniciales ෝ𝒙 𝑡
0
𝑦 𝒙(𝑡
0
).
Estas dos condiciones imponen diversas restricciones a las matrices del
observador.
….
Si se define el vector de error como la diferencia entre el estado real y el
estimado:
Derivando esta última expresión, teniendo en cuenta las anteriores y
sustituyendo el valor de y(t) se tiene que:
0
0
0
La aplicación del teorema a esta última expresión implica que:
Para que la entrada sea cual sea no influya en que los estados coincidan se debe
cumplir que:
𝑩
0
= 𝑩
Dada la ecuación anterior, para que los estados coincidan en todo instante se debe
cumplir que:
𝑨
0
= 𝑨 − 𝑲
0
𝑪
𝑒 𝑡 = 𝒙 𝑡 − ෝ𝒙 𝑡
…..
0
01
02
0 𝑛
permite calcular las n incógnitas k
o 1
, k
o 2
, ..., k
on
0
0
……
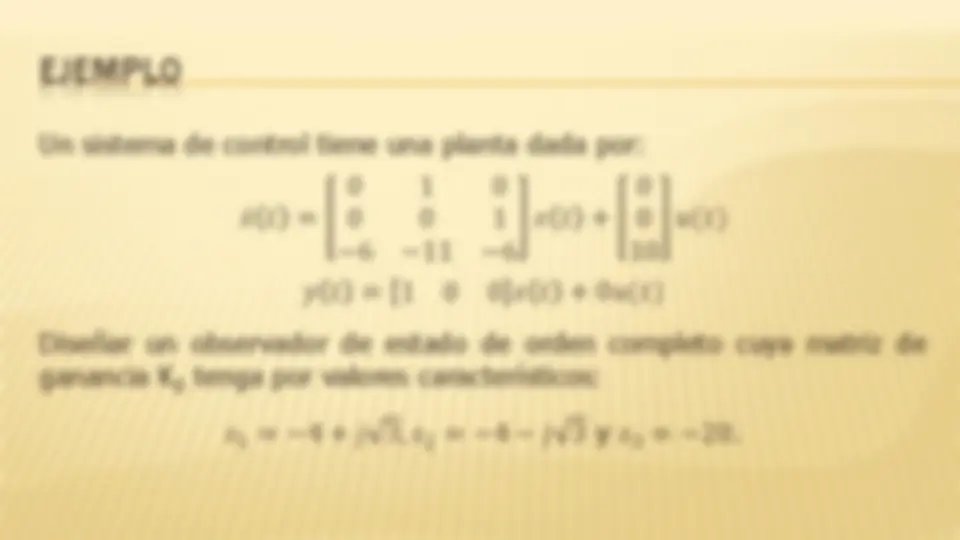
Un sistema de control tiene una planta dada por:
𝑥 ሶ 𝑡 =
0 1 0
0 0 1
− 6 − 11 − 6
𝑥 𝑡 +
0
0
10
𝑢(𝑡)
𝑦 𝑡 = 1 0 0
𝑥 𝑡 + 0 𝑢(𝑡)
Diseñar un observador de estado de orden completo cuya matriz de
ganancia K
0
tenga por valores característicos:
𝑠
1
= − 4 + 𝑗 3 , 𝑠
2
= − 4 − 𝑗 3 y 𝑠
3
= − 20.
0
∗
∗
∗
∗
∗
2
0
0
0
1
0
2
0
3
0
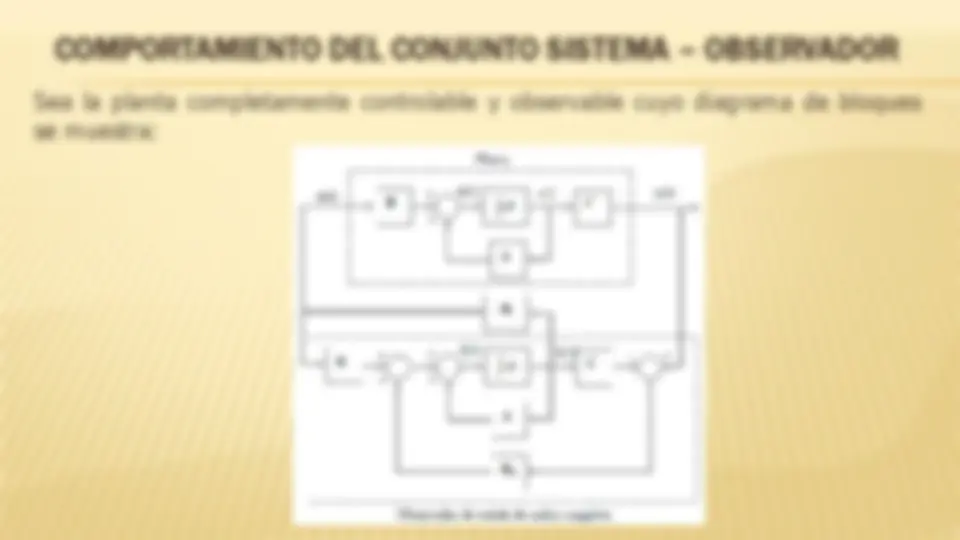
COMPORTAMIENTO DEL CONJUNTO SISTEMA – OBSERVADOR
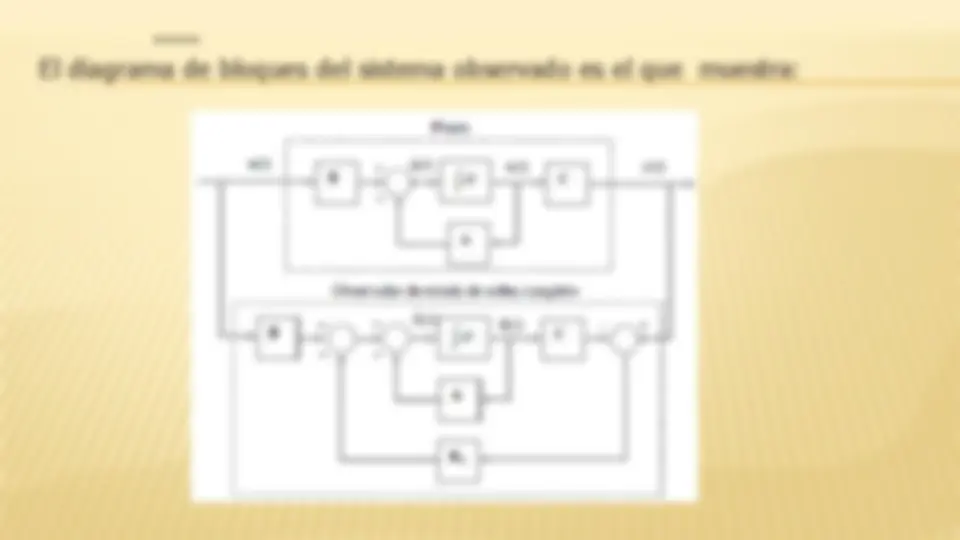
Sea la planta completamente controlable y observable cuyo diagrama de bloques
se muestra:
……
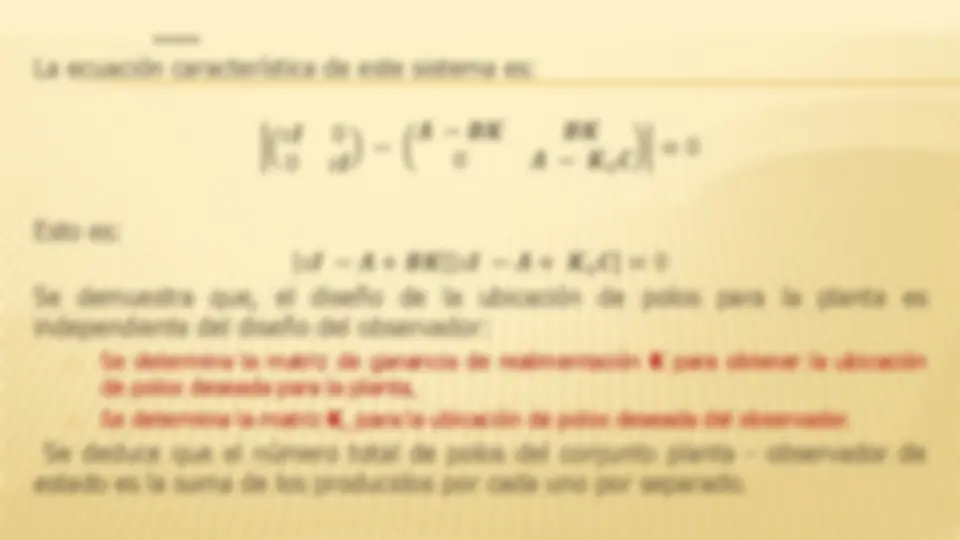
La ecuación característica de este sistema es:
0
Esto es:
0
Se demuestra que, el diseño de la ubicación de polos para la planta es
independiente del diseño del observador:
de polos deseada para la planta,
o
para la ubicación de polos deseada del observador.
Se deduce que el número total de polos del conjunto planta - observador de
estado es la suma de los producidos por cada uno por separado.
Además de los indicados, otros comandos para el diseño y simulación
de esquemas de control en el espacio de estados, son:
Devuelve la evolución temporal de la salida y de los estados ante una cierta
condición inicial x 0 de los estados.
Devuelve una descripción en espacio de estados en forma canónica
controlable, separando los subespacios controlables y no controlables.
Devuelve una descripción en espacio de estados en forma canónica
observable, separando los subespacios observables y no observables
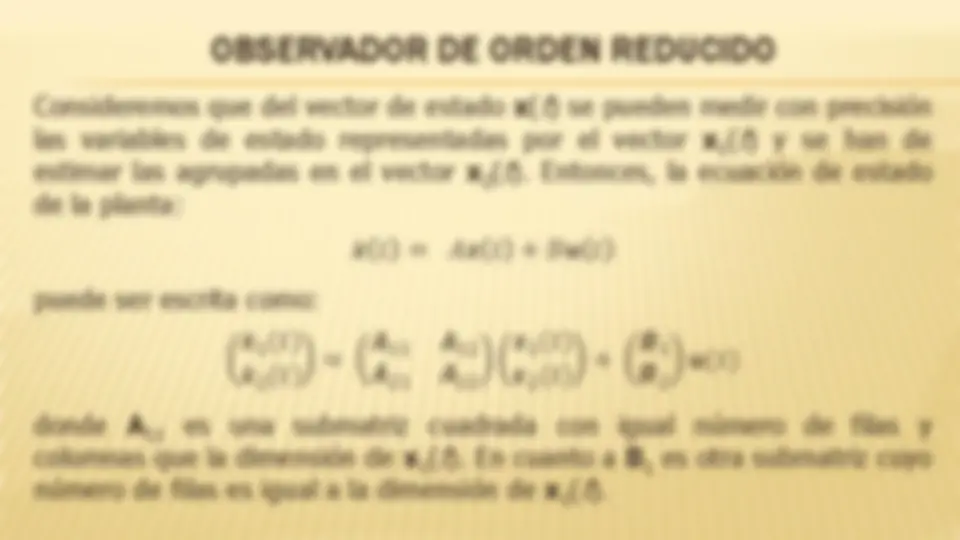
Si algunas de las variables de estado se
pueden medir con precisión, entonces
no necesitan estimarse.
Suponiendo que el vector de estado x
es un vector de dimensión n y que el
vector de salida y es un vector de
dimensión m medible. Como las m
variables de salida son combinaciones
lineales de las variables de estado,
entonces necesita estimarse sólo n – m
variables de estado. El observador de
orden reducido será de (n – m)-ésimo
orden.
……
1
11
1
12
2
1
2
21
1
22
2
2
1
11
1
1
12
2
la ecuación y ( t) = Cx ( t) se puede escribir como:
1
2
…..
Entonces, el modelo del observador de estado de orden reducido será,
ሶ
𝑥 ො
2
𝑡 = 𝑨
22
− 𝑲
0
𝑨
12
ෝ 𝒙
2
𝑡 + 𝑨
21
𝒙
1
𝑡 + 𝑩
2
𝒖 𝑡 + 𝑲
0
ሶ 𝒙
1
− 𝑨
11
𝒙
1
𝑡 − 𝑩
1
𝒖(𝑡)
Pero, se establece para la ecuación de salida, y(t) = x
1
(t), por tanto, la ecuación final
del observador de orden reducido es
ሶ
𝐱 ො
2
𝑡 = 𝐀
22
− 𝐊
0
𝐀
12
ෝ𝒙
2
𝑡 + 𝑩
2
− 𝑲
0
𝑩
1
𝒖 𝑡 + 𝑲
0
ሶ 𝑦 𝑡 + 𝑨
21
− 𝑲
0
𝑨
11
𝑦 𝑡
De la expresión anterior se deduce que la ecuación característica del observador de
orden reducido, que en este caso es mínimo, es:
𝑠𝑰 − 𝑨
22
0
𝑨
12
= 𝑠 − 𝑝
1
𝑠 − 𝑝
2
… 𝑠 − 𝑝
𝑛−𝑚
= 0
donde se ha supuesto que el vector de salida (medible) es de orden m.
En la ecuación última, hay n – m incógnitas: k
o 1
, k
o 2
, ...,
ko(n - m)
y n – m coeficientes
conocidos (polos) ubicados por el diseñador, con lo cual, para calcular los elementos
de la matriz de ganancia basta con igualar los coeficientes.