



Universidade Estadual do Oeste do Paraná
UNIOESTE/Campus de Foz do Iguaçu
Centro de Engenharias e Ciências Exatas - CECE
Vibrações Mecânicas
Notas de Aulas - 3.oVersão
Samuel da Silva
Foz do Iguaçu, 2010.



























































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Modelação e Analise de Estruturas - Dinamica das Estruturas
Tipologia: Notas de estudo
1 / 149

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Vibrações Mecânicas
Este texto apresenta a 3.o^ versão das notas de aulas da disciplina Vibrações do curso de graduação em Engenharia Mecânica do Centro de Engenharias e Ciências Exatas da Universidade Estadual do Oeste do Paraná (UNIOESTE), Campus de Foz do Iguaçu. Estas notas foram elaboradas em 2008 e não tem a pretensão de substituir os excelentes livros textos existentes na área [9], [7], [12], [13] ou [17] entre uma enorme lista, mas apenas servir como um instrumento conciso e simples para que os alunos e o professor possam seguir durante as aulas teóricas e práticas. Portanto, o leitor não encontrará nada de original ou revolucionário nesta apostila para o ensino de vibrações, pelo contrário. O texto é uma simples compilação de literatura diversa no assunto, que eu julgo interessante ser abordada para orientar o estudo. Sendo assim, a consulta, estudo, resolução de exercícios e leitura dos livros textos é essencial como parte do aprendizado dos estudantes visando o sucesso ao final do curso. Em 2009 a apostila passou por algumas mudanças, em especial com a inclusão de alguns exercí- cios adaptados do ENADE e de concursos públicos diversos e adicionando no capítulo 3 temas como solução numérica de problemas forçados e vibração causada por movimento de fluido. Na 3.o^ edição (2010) incluiu-se dois novos capítulos: o capítulo 6 que trata do problema de vibrações em sistemas contínuos e o capítulo 7 que procura dar uma visão geral para os alunos na manutenção preditiva por análise de vibrações. Mesmo assim, alguns capítulos ainda não foram completamente revisados. Alguns tópicos estudados no curso, como absorvedores dinâmicos de vibrações, ainda continuam apenas na versão de manuscrito e deverão ser incorporados neste texto nos próximos anos. Outro ponto que está se trabalhando para incluir nas próximas versões deste texto, diz respeito a práticas de laboratório e testes experimentais usando os recursos disponíveis no Laboratório de Dinâmica de Estruturas e Máquinas (LaDEMaq) da UNIOESTE. Os alunos podem consultar o meu site pessoal, onde colocarei informações sobre os roteiros destas práticas. É aconselhável que os alunos mais interessados busquem informações em outros livros e sites de outros professores neste ponto para complementar e reforçar o assunto. Estou consciente de que este texto apresenta erros e enganos, até pelo fato de ter sido escrito de maneira muito rápida para atender a demanda dos alunos matriculados e interessados. Assim, espero contar com o apoio dos alunos e demais colaboradores para melhorar este texto constantemente, sendo assim, sugestões, correções e comentários são muito bem vindos^1. Gostaria de agradecer ao Prof. Milton Dias Junior da FEM/UNICAMP por ceder algumas figuras ilustrativas presentes no capítulo 1. Também agradeço ao Prof. Geraldo Carvalho Brito Jr. pela cuidadosa leitura da 1.o versão desta apostila e por seus comentários e correções. Especial agradecimento a todos os alunos e interessados que utilizaram este material e que deram várias sugestões e comentários desde de 2008. Se vocês se sentirem motivados e empolgados com esta área a partir da leitura deste texto e estudo desta disciplina da mesma forma que eu, já me sentirei recompensado e ciente de dever cumprido. Boa leitura, estudo e divertimento!!
Samuel da Silva Março de 2011.
(^1) e-mail: [email protected]
de uma interação entre forças elásticas, de inércia e aerodinâmicas. Assim, para uma aeronave ser certificada pelo CTA/FAA as empresas aeronáuticas devem ter total conhecimento sobre frequências de ressonância em função das velocidades de vôo, peso, altitude, pressão, etc. Conseqüentemente, as exigências básicas para os engenheiros envolvidos neste processo é ter conhecimentos básicos sólidos em vibrações mecânicas, muitos deles serão apresentados durante este curso introdutório.
A análise modal experimental (AME) consiste em extrair os chamados parâmetros modais de um sistema mecânico. Os parâmetros modais são parâmetros característicos do sistema e são compostos por frequências naturais, fatores de amortecimento e modos de vibrar. Se forem corretamente obti- dos é possível descrever o comportamento de um sistema vibratório sem necessitar de um modelo matemático. A AME também é muito usada pela indústria automobilística e aeronáutica. Um exemplo interes- sante de aplicação é a extração dos modos naturais de uma porta de carro visando otimizar o projeto de retrovisores [10]. Nesta aplicação, a empresa fabricante do automóvel constatou que em determi- nadas velocidades o retrovisor vibrava muito e refletia a luz do sol diretamente na face do motorista, o que poderia provocar desconforto, além do risco de acidente. Com o intuito de descobrir qual a origem desta vibração em velocidades tão características foi realizada uma AME na porta do carro com o retrovisor, vista na figura (1.1). Depois de extraído os modos naturais, vistos na figura (1.2), constatou-se que as frequências naturais destes modos eram excitadas nesta faixa de velocidades. A partir de um procedimento de otimização usando uma malha de elementos finitos foi possível propor uma modificação estrutural na porta e retrovisor visando reduzir este problema.
Quando um componente mecânico de um máquina rotativa^3 , como rolamentos, mancais, cone- xões, etc. apresentam algum defeito, como desalinhamento, desbalanceamento, trinca, etc. o com- portamento vibratório do sistema muda o seu padrão. Caso se conheça algum sinal de referência da máquina é possível realizar uma comparação entre dois estados: referência (sem dano) e com dano. Assim, é possível dar um diagnóstico se a máquina está ok ou não. Adicionalmente, com aplicação de análise espectral, pode ser possível inclusive dar um diagnóstico de que tipo de dano a máquina apresenta. As unidades de geração de usinas hidrelétricas, como as de Itaipu, são exemplos de siste- mas que são monitorados periodicamente a partir de sinais de vibração para que se avalie se os níveis de vibração global estão dentro do estabelecido pelos fabricantes das máquinas.
Integridade estrutural é o procedimento de extrair informações dinâmicas de estruturas como pontes, fuselagens de aeronaves, estruturas offshore, barragens, etc. visando detectar modificações estruturais correspondentes a falhas. Esta é uma área multidisciplinar, que compreende estudo de materiais, ferramentas estatísticas, reconhecimento de padrões, análise de tensões e principalmente vibrações mecânicas. Assim, como na manutenção preditiva em sistemas rotativos por análise de vibrações, a medição de vibração mecânica em grandes estruturas pode fornecer informações úteis para diagnóstico e prognóstico de saúde estrutural de sistemas de engenharia.
(^3) Sistemas rotativos compreendem ventiladores industriais, compressores, turbinas, etc.
(a) Carro com instrumentação usada no ensaio.
(b) Detalhe da porta.
Fig. 1.1: Análise modal experimental em porta e retrovisor de carros.
Um acidente estrutural que teve destaque recente na mídia foi a queda de uma ponte sobre o rio Mississipi, na cidade de Mineápolis nos Estados Unidos, figura 1.3. A ponte tinha sido inspecio- nada em 2005 e 2006 através de medidas de vibrações e na ocasião nenhum defeito estrutural foi encontrado, porém um estudo conduzido anteriormente emi2001 pelo Departamento de transportes de Minnesota mostrou vários defeitos por tempo de uso^4 que foram ignorados pelas autoridades. O desastre teve um saldo trágico de 7 mortos e dezenas de feridos.
Vibração é definida como um movimento periódico, i.e., uma oscilação de uma partícula, um sistema de partículas ou um corpo rígido em torno de uma posição de equilíbrio. A seguir alguns
(^4) A ponte foi construída em 1967.
Um sistema mecânico contém componentes de inércia, de rigidez e amortecimento. Os compo- nentes de inércia têm energia cinética quando o sistema está em movimento. A energia cinética de um corpo rígido^5 em movimento é
m¯v^2 +
Iω¯^2 (1.1)
sendo ¯v a velocidade do centro de massa do corpo, ω a velocidade angular do eixo perpendicular ao plano de movimento, m é a massa do corpo e I¯ é o momento de inércia de massa paralelo ao eixo de rotação que atravessa o centro de massa. Já um componente de rigidez (uma mola linear) tem uma relação força deslocamento conforme a equação abaixo
F = kx (1.2) onde F é a força aplicada e x é a mudança do comprimento. A rigidez k tem dimensão de força por unidade de comprimento. No SI^6 a unidade de rigidez é N/m. Medir experimentalmente massa e rigidez não é tão difícil, agora medir amortecimento pode ser um enorme desafio, pois os sistemas mecânicos podem dissipar energia de formas diferentes. O mais comum é considerar um modelo de amortecedor com amortecimento viscoso. Um componente linear de amortecimento viscoso tem uma relação força-velocidade da forma
F = cv (1.3) sendo c o coeficente de amortecimento. A unidade no SI é N.s/m. Existem outros tipos comuns de amortecimento como: amortecimento de Coulomb, amortecimento estrutural, etc. que serão descritos mais a frente durante este curso. Já quando uma coordenada angular é empregada como coordenada generalizada para um sistema linear, o sistema pode ser modelado como um sistema torcional, figura (1.4).
Fig. 1.4: Sistema torcional.
O momento aplicado na mola linear torcional é proporcional à sua rotação angular enquanto o momento aplicado no amortecimento viscoso torcional é proporcional à velocidade angular. Os valores dos coeficientes do sistema torcional equivalente são determinados pelo cálculo da energia
(^5) Lembrando que um corpo rígido é definido como um corpo onde as suas dimensões devem ser consideradas na análise dinâmica e, assim, o momento de inércia deve ser levado em conta. (^6) Sistema Internacional.
cinética total, energia potencial, e trabalho feito pelo amortecedor viscoso do sistema original em termos da escolha da coordenada generalizada empregada
Ieq θ˙^2 , (1.4)
V =
kteqθ^2 , (1.5)
∫ (^) θ 2
θ 1
cteq θdθ.˙ (1.6)
De acordo com a força de excitação que age em um sistema mecânico as respostas de vibração podem ter características diferentes. A seguir os tipos de excitação mais comuns:
Força harmônica: forma mais simples de excitação em sistemas mecânicos, descrita pela equação
F (t) = F sen (ωt) , (1.7)
sendo F a amplitude da excitação e ω a frequência de excitação em rad/s. Também é usual descrever as frequências em Hertz Hz^7. A frequência em Hz é nomeada de f e descrita por
f =
sendo T o período de oscilações (tempo que o movimento harmônico leva para repetir seu padrão), medidos em s. A relação entre as frequências em Hz e rad/s é dada por
f =
2 π
ω. (1.9)
Um movimento harmônico é definido completamente a partir do conhecimento das variáveis acima. Um exemplo prático de excitação harmônica aparece em rotores com massa desbalan- ceada. A figura (1.5) mostra um exemplo gráfico de uma força deste tipo.
Força periódica: Tipo de excitação que se repete após um período, mas não de forma exatamente igual, conforme o exemplo da figura (1.6). Motores de combustão interna são exemplos deste tipo de excitação.
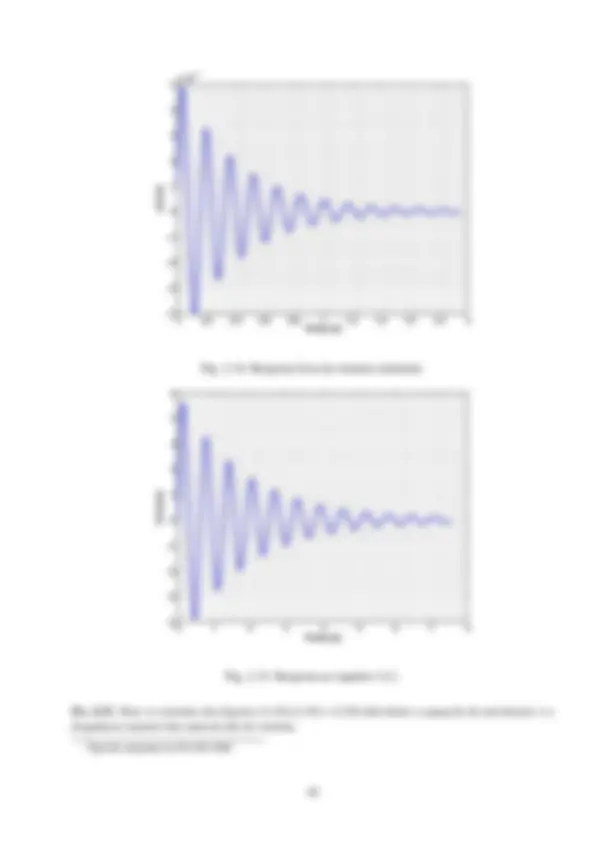
Força transitória: Excitação caracterizada por uma liberação de energia grande em um intervalo curto de tempo. Inúmeros exemplos descrevem este tipo de força: explosão, impacto, etc. A figura (1.7) ilustra graficamente este tipo de excitação.
Força aleatória: São forças de excitação que não descrevem um padrão determinístico que possa ser definido por uma equação. Para tratar sistemas excitados por forças aleatórias é necessário utilizar métodos estatísticos. Fenômenos aeroelásticos são exemplos de sistemas excitados por forças aleatórias, como forças em asas de aviões, ventos em colunas de pontes, etc. A figura(1.8) ilustra um sinal típico de excitação aleatória. (^7) Em homenagem ao cientista alemão Hertz, o primeiro a estudar as ondas de rádio, que também são vibrações, porém
de origem elétrica.
(^00) 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.
0.
0.
0.
0.
0.
0.
0.
0.
1
Tempo [s]
Amplitude [N]
Fig. 1.7: Exemplo de força transitória.
−3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
−
−
0
1
2
3
Tempo [s]
Amplitude [N]
Fig. 1.8: Exemplo de força aleatória.
meq x˙^2. (1.10)
Já a energia potencial de um sistema linear pode ser escrita na forma
keqx^2. (1.11)
O trabalho realizado pela força de amortecimento viscoso em um sistema linear entre duas loca-
Fig. 1.9: Sistema massa-mola-amortecedor.
lizações arbitrárias x 1 e x 2 podem ser escritas como
∫ (^) x 2
x 1
ceq xdx˙ (1.12)
Molas em paralelo: O sistema da figura (1.10) tem molas em paralelo que são fixadas a um bloco com massa m. A meta é definir qual a rigidez equivalente desta combinação de molas visando modelar o sistema com uma única mola, similar ao da figura (1.9).
Fig. 1.10: Sistema mecânico como molas em paralelo.
Se o bloco estiver sujeito a um deslocamento arbitrário x, todas as molas sofrem este desloca- mento, assim x = x 1 = x 2 = · · · = xn. Assim a força exercida é
F = keqx = k 1 x + k 2 x + · · · + knx =
( (^) n ∑
i=
ki
x. (1.13)
Analisando a Eq. (1.13) observa-se que a rigidez equivalente para um sistema com molas em paralelo é dada por:
keq =
∑^ n
i=
ki. (1.14)
Molas em série: Já o sistema da figura (1.11) tem molas em série que são fixadas a um bloco com massa m. Novamente a meta é definir qual a rigidez equivalente desta combinação de molas.
Fig. 1.12: Exemplo 1.
Fig. 1.13: Exemplo 2.
Quanto às propriedades físicas: O sistema pode ser discreto, neste caso tem um número finito de gdl, ou contínuo^10 , neste caso tem um número infinito de gdl.
Quanto às equações envolvidas: O sistema pode ser linear (potência 0 ou 1 e não existe produto entre estas e suas derivadas) ou não-linear, quando não é válido o princípio da superposição.
Exemplo 1.1 Determine o número de graus de liberdade (gdl) para ser usado na análise de vibrações da barra rígida da figura (1.12), e especifique um conjunto de coordenadas generalizadas que pode ser usado nesta análise.
Solução: Uma vez que a barra é rígida o sistema têm apenas um grau de liberdade. Uma possível escolha para coordenada generalizada é θ, deslocamento angular da barra medido positivo no sentido anti-horário da posição de equilíbrio do sistema.
Exemplo 1.2 Determine o número de gdl necessários para analisar o sistema mecânico composto por uma barra rígida com comprimento L e duas molas da figura (1.13), e especifique um conjunto de coordenadas generalizadas que pode ser usado nesta análise de vibrações.
Solução: Assume-se x como sendo o deslocamento do centro de massa da barra rígida, medido a partir da posição de equilíbrio. Infelizmente, o conhecimento apenas de x é insuficiente para determinar totalmente o deslocamento de qualquer partícula na barra. Assim o sistema tem mais de um grau de liberdade. Para descrever totalmente este movimento deve-se considerar (^10) Também chamado de sistema com parâmetros distribuídos.
Fig. 1.14: Exemplo 2 - solução.
Fig. 1.15: Exemplo 3.
também a rotação angular θ no sentido anti-horário da barra com respeito ao eixo da barra em sua posição de equilíbrio. Se θ é pequeno^11 , então o deslocamento do fim do lado direito da barra é x + (L/2)θ. Portanto, o sistema tem 2 gdl, e x e θ são um possível conjunto de coordenadas generalizadas, como ilustrado na figura (1.14).
Exemplo 1.3 Dado o sistema da figura (1.15) encontre um modelo equivalente composto apenas por uma mola fixa ao bloco de massa m.
Solução: Primeiro deve-se substituir as combinações de molas em paralelo por rigidez equivalente usando a Eq. (1.14). Este primeiro resultado é mostrado na figura (1.16a). Em seguida calcula- se a rigidez equivalente do lado esquerdo do bloco
1 1 3 k +^
1 3 k +^
1 k +^
1 3 k
k 2
Por sua vez, as molas fixadas do lado direito do bloco têm rigidez equivalente da forma
1 k +^
1 2 k
2 k 3
Como resultado tem-se o sistema da figura (1.16b). Quando o bloco tem um deslocamento arbitrário x, os deslocamentos em cada mola da figura (1.16b) são os mesmos, e a força total agindo sobre o bloco é a soma das forças desenvolvidas nas molas. Assim estas duas molas (^11) Hipótese feita para assumir que o sistema é linear.