



GEODÉSIA
Aula 4
Métodos de Posicionamento GPS
Universidade Paulista – UNIP, Curso de Engenharia Civil
Prof. Me. Leomar Jr. - Geodésia































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Aula de Geodesia princípios básicos
Tipologia: Notas de aula
1 / 52

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Métodos de Posicionamento GPS^ Aula 4
Universidade PaulistaProf. Me. Leomar Jr. - Geodésia – UNIP, Curso de Engenharia Civil
Posicionamento Absoluto ( Posicionamento por Ponto )
Posicionamento Relativo
Posicionamento Absoluto é o método mais simples aplicado por diversos usuários do GPS
Relógio Atômico
Relógio de Quartzo
Distância
Distância^ Distância Distância
l^ X,Y, Z,f, h
l^ X,Y, Z,f, h
l^ X,Y, Z,f, h X,Y, Z l,f, h l^ X,Y, Z,f, h
Linha de Base
Pós-processamento dos dados
Receptores Geodésicos de Monofrequência (L1) ou de Dupla Frequência (L1 e L2 ou L2, L2 e L5)
Sokkia Stratus Topcon Hiper
Ashtech Hiper II^ Topcon Promark 3
Promark 2^ Ashtech
GS20/SR20^ Leica
Trimble 5700
Tech GeoGTR-G² Hiper II^ Topcon
GPS 1200^ Leica
GSR 2700 ISX^ Sokkia
TrimbleR
O RINEX (Receiver Independent Exchange Format) é um formato de intercâmbio de dados coletados por receptores GNSS e aceito por todos os programas de pós-processamento GPS. O formato RINEX é importante pois permite que sejam utilizados receptores de diferentes fabricantes em uma mesma missão É composto dos seguintes arquivos:
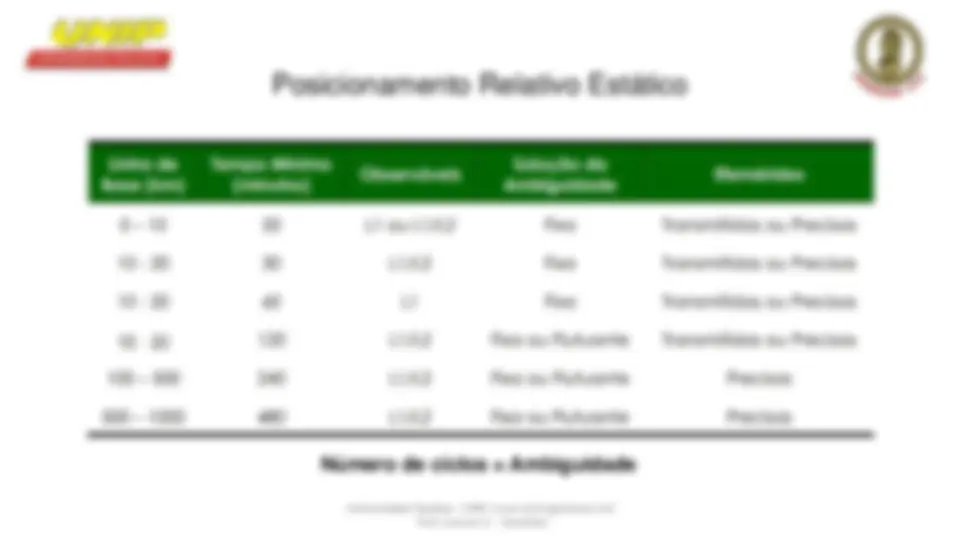
No posicionamento relativo estático, tanto o(s) receptor(es) do(s) vértice(s) de referência quanto o(s) receptor(es) do(s) vértice(s) de interesse devem permanecer estacionados (estáticos) durante todo o levantamento (por um tempo maior que 20 minutos ). Neste método, a sessão de rastreio se estende por um longo período.
O posicionamento relativo estático-rápido é similar ao relativo estático, porém, a diferença básica é a duração da sessão de rastreio, que neste caso, em geral é inferior a 20 minutos.
Este método de posicionamento é uma transição entre o estático-rápido e o cinemático. O receptor que ocupa o vértice de interesse permanece estático , porém num tempo de ocupação bastante curto (de 5 a 3 segundos) , necessitando coletar dados no deslocamento entre um vértice de interesse e outro. Quanto maior a duração da sessão de levantamento com a coleta de dados íntegros, sem perdas de ciclos , melhor a precisão na determinação de coordenadas.