
Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Guias e Dicas


Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Encontrar documentos
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Encontra documentos específicos para os exames da tua universidade
Videoaulas
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Quiz
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Apresentação sobre cinemática dos mecanismos
Tipologia: Esquemas
2019

1 / 63

Esta página não é visível na pré-visualização
Não perca as partes importantes!





































Documentos relacionados
Pré-visualização parcial do texto
Baixe Cinematica dos mecanismos e outras Esquemas em PDF para Cinemática, somente na Docsity!
Profº Clodoaldo Borges Chagas [email protected]
Projeto de Mecanismos
Introdução aos Mecanismos e à Cinemática como Ciência. Graus de Liberdade - modelos e equações derivadas. Análise de posição de mecanismos de 1 grau de liberdade - Mecanismos Biela-Manivela, 4-Barras - Generalização de coordenadas - Jacobiano. Aplicação em programas computacionais. Análise de velocidade de mecanismos de 1 grau de liberdade - Coeficientes de Velocidade. Análise de aceleração de mecanismos de 1 grau de liberdade - Coeficientes de Aceleração. Soluções analíticas e numéricas. Análise de posição, velocidade e aceleração em mecanismos de n graus de liberdade. Métodos numéricos. Conteúdo: Projeto de Mecanismos
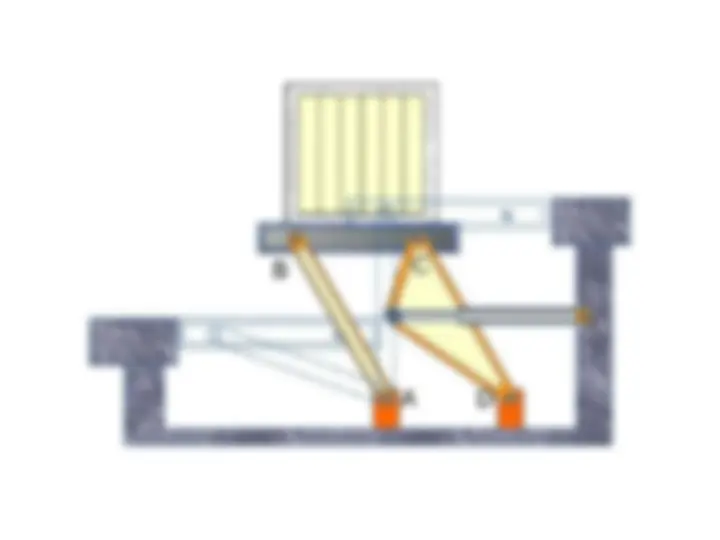
Cadeia cinemática:
Montagem de barras e juntas,
interconectadas de forma a fornecer um
movimento controlado de saída, em
resposta a um movimento fornecido como
entrada.
Mecanismo:
Uma cadeia cinemática onde pelo menos
uma barra é ligada a um sistema de
referência.
Máquina: Um conjunto de mecanismos
agrupados de forma a transmitir
forças e executar trabalhos.
i) Biela-manivela ii) Quatro-barras iii) Seis-barras
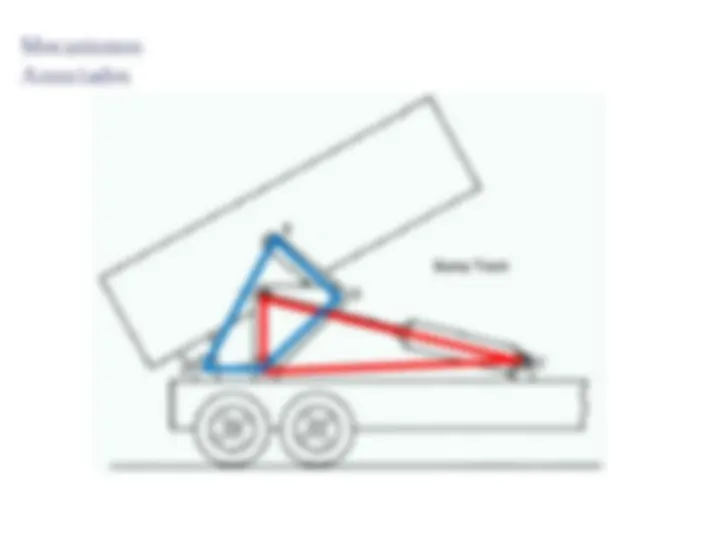
Os mecanismos são cinematicamente divididos em planares e espaciais. Os mecanismos planares são aqueles cujo tratamento cinemático pode ser feito no plano, ex: uma escavadeira é uma máquina tridimensional, porém o mecanismo articulado que a compõem pode ser projetado em um plano (x e y) Do mesmo modo pode ser tratado um elemento que se desloca ao longo de uma trajetória, onde apenas duas coordenadas (x e q) podem descrever completamente o movimento.
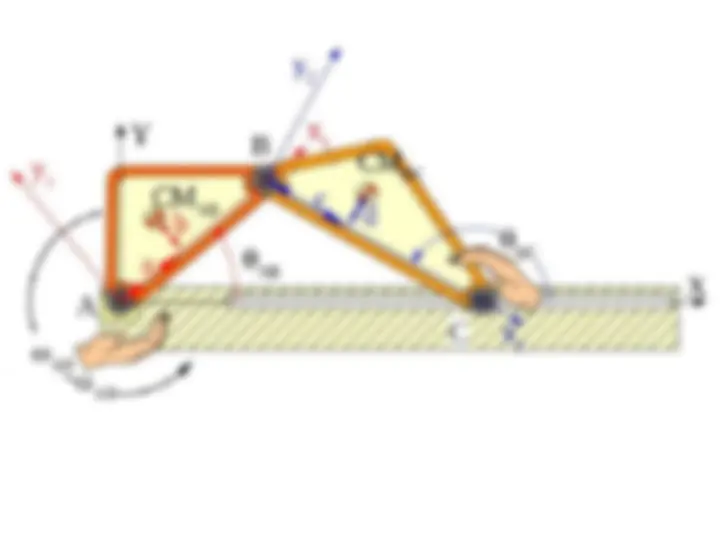
Rotação Pura : O corpo possui um ponto (centro de rotação) para o qual não existe movimento em relação ao referencial. Todos os outros pontos do corpo descrevem arcos em torno do ponto fixo. Uma linha de referência passando pelo corpo e pelo ponto fixo, muda apenas de orientação angular com o movimento do corpo.
Translação Pura : Todos os pontos do corpo descrevem trajetórias paralelas ( curvilínea ou retilínea ). Uma linha de referência passando pelo corpo sofre deslocamento sem mudança da orientação angular com o movimento do corpo.
Movimento Completo: Combinação da movimentos:
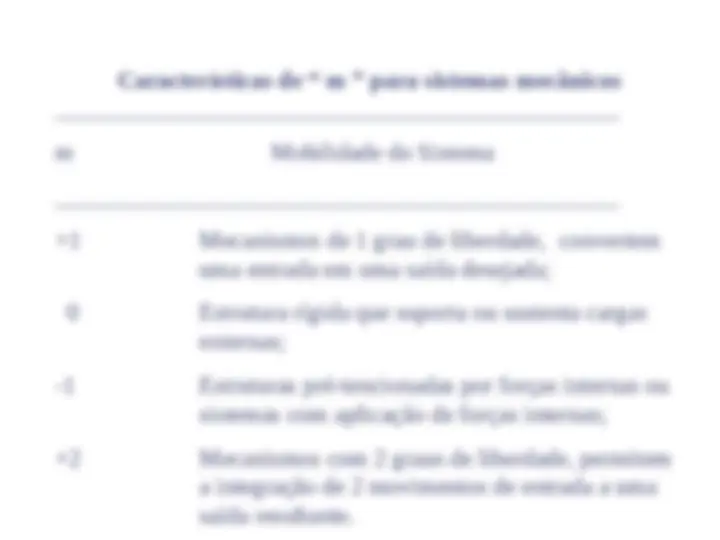
Graus de Liberdade Todos os sistemas mecânicos podem ser classificados de acordo com o número de graus de liberdade ( G.L.) que possui. Os graus de liberdade de um sistema são o número de parâmetros independentes necessários para definir completamente sua posição no espaço a cada instante no tempo.
Nós são pontos de interconexão entre barras. Junta é a conexão entre duas ou mais barras através de seus nós. Uma junta é também definida por um par cinemático que, por sua vez, pode ser classificado : a) Pelo número de graus de liberdade a ele relacionado. b)Pelo tipo de contato entre seus elementos ( pontual, linear ou superficial ). c)Pelo tipo de fechamento da junta ( por força ou geometria ). d)Pelo número de barras conectadas ( ordem da junta ).
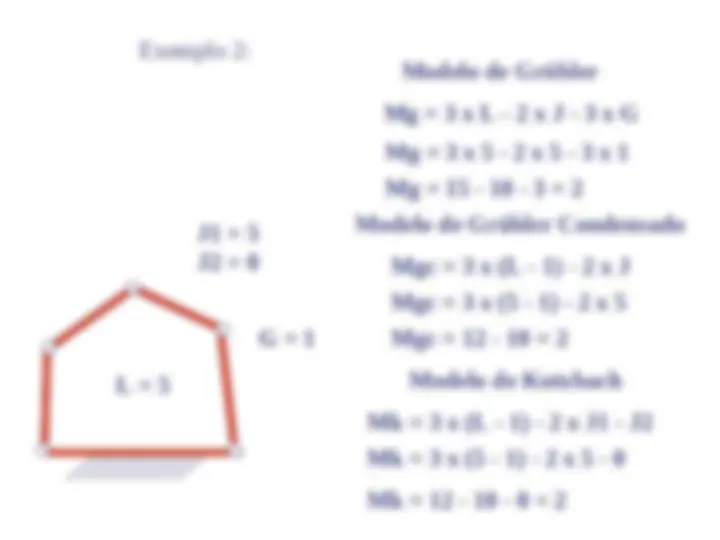
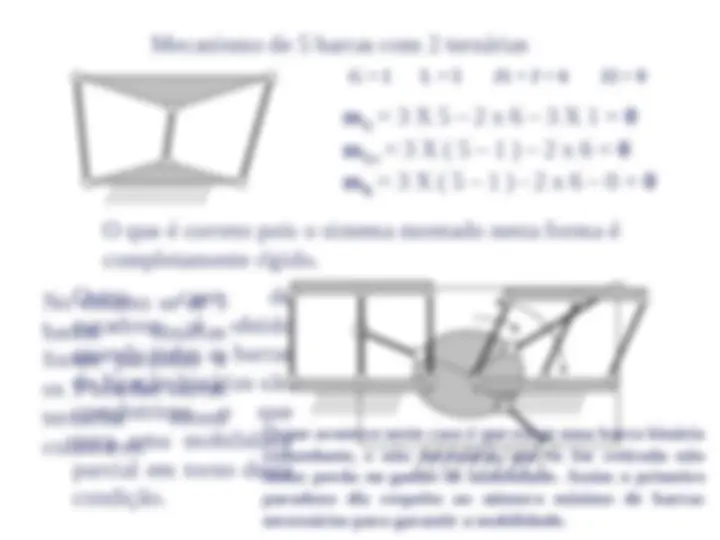
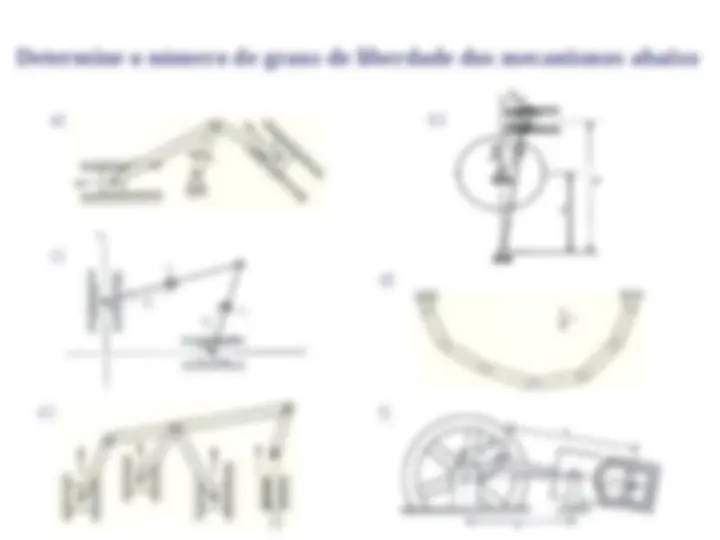
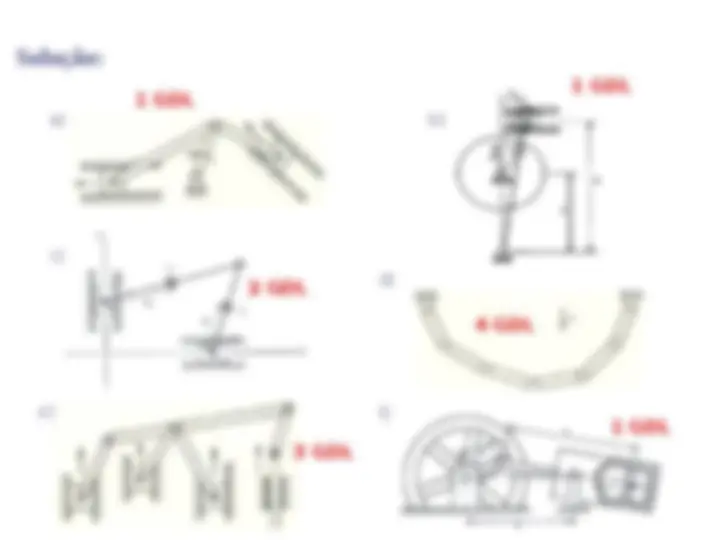
Determinação do grau de liberdade de um
mecanismo.
A determinação do grau de liberdade de um mecanismo é uma tarefa muitas vezes difícil. Apesar do grande número de pesquisadores que têm se dedicado a uma formulação geral, até hoje ainda não foi superada a barreira dos paradoxos. Existem, porém, equações que podem guiar uma determinação correta, na maior parte dos casos.