



1080MiC User manual
V1.0



































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Diagrama de ligacao,servo motores
Tipologia: Esquemas
1 / 44

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Press the Parameter key on the panel, as shown in the Picture 1.1, F1 is Common parameters, F2 is System parameters. In the Common parameters, P1 to P8 are the functional classification, you can use it to find the part you want. If you want to change the parameter, just use the directional key to choose the parameter, input the value you want and press the Enter key. In the System parameter, press the P1(Find) and input the number of parameter you want to find and press enter, it will move to the parameter you want, and if you press the P2(Sort), it will classify parameters like common parameters, as shown in the Picture 1.3. Picture 1. Picture 1.
Picture 1.
Press the Diagnosis key on the panel, then press F8 PLC, then press F2 PLC parameters, you will find the PLC parameters, as shown in the Picture 1.4. Press the EOB key, you can modify the parameter here, 0 represents low level, 1 represents high level. Picture 1.
Press the SET key , input the level 3 password to the place as shown in the Picture 2.1.
Picture 2.
MC (pulse version) function, MiC (bus version) does not require setting.
Signal Address Function Description X0 X0.0 DECX X-axis deceleration input signal Y0 X1.5 DECY Y-axis deceleration input signal Z0 X1.3 DECZ Z-axis deceleration input signal A0 X2.3 DEC4 Fourth axis deceleration signal B0 X2.4 DEC5 Fifth axis deceleration signal Picture 3.
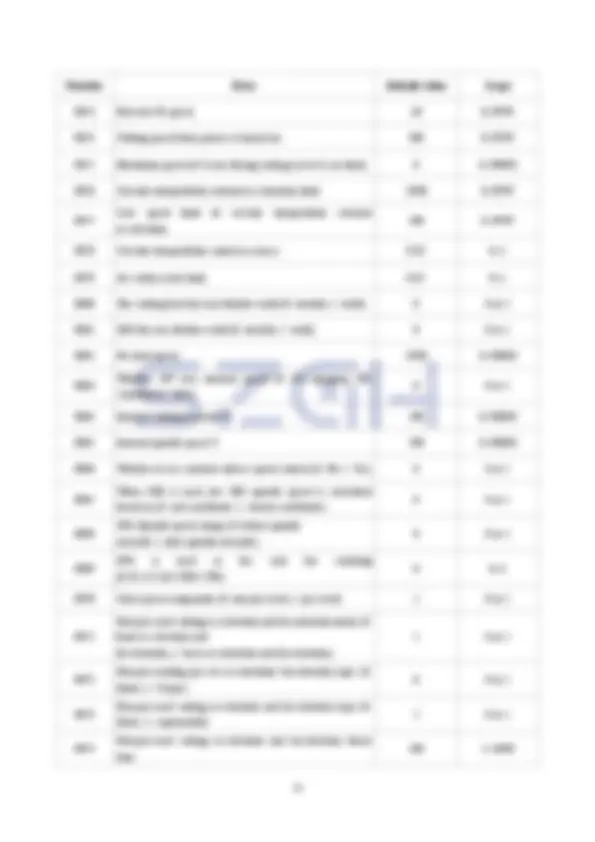
0111:Return zero deceleration signal path,whether it is calculated through PLC logic operation(0:No, 1:Yes) 0112:Back to zero mode(0: after the block, 1: before the block) 0113:Return to zero and select one turn signal(0: No, 1: Yes) 0114:Zero-back mode when there is no one turn signal(0: U type, 1: T type) 0115:Whether the Z axis is preferentially returned to zero after power on(0: No, 1: Yes) 0116:Can manual zero return select multi-axis(0: Can, 1: Can’t) 0117:Manual back to the reference point speed select(0: Rapid, 1: Manual) 0118:Is the relative coordinate can be eliminated after back to reference point(0: No, 1: Yes) 0119:Whether mechanical zero point be memorized(0: no memory, 1: memory) 0120:Whether the G28 command alarm when no return to zero(0: use the block, 1: alarm) 0121:Did not return to zero, does an alarm occur when executing commands other than G without returning to zero?(0: no alarm, 1: alarm) 0122:Type of zero-return deceleration signal(0: Normally open, 1: Normally close) 0123:Return to zero direction(0: positive, 1: negative) 0124:High speed back to the reference 0125:Low speed back to the reference 0126:Reference point offset 0127:1st^ reference point 0128:2nd^ reference point 0129:3rd reference point 0130:4th reference point 0313:Return the zero using only zero signal(0: No, 1: Yes) 0342:After the power on, each axis returns to zero(0: No, 1: Yes)
Picture 3. (2) Only use Z signal of motor encoder mode : First, the system parameter 342 must be 0. When the system parameter 313 = 1 , it means that the zero return mode uses only the motor encoder Z signal, that is, it searches for the motor encoder Z signal according to the direction set by the system parameter 123 and the speed set by the system parameters 124 and 125. The premise is that the pins 6 and 14 (PC- and PC+ signals) of the system CN1-CN4 ports need to be connected. Picture 3.
Picture 3. (3) Only use switch to return to zero mode : When system parameters 342 and 313 are both 0 , and system parameter 113 = 0 , the controller zero return mode is to use only the mechanical switch to return to zero. System parameter 112 sets the machine movement direction after the machine touches the switch. 0 means that after touching the switch, the feed axis continues to maintain the original direction of zero return and moves out of the mechanical switch. 1 means that after touching the switch, the feed axis moves in the opposite direction and out of the mechanical switch. System parameter 122 sets the switch type. 0 is normally open and 1 is normally closed. System parameter 123 sets the axis movement direction for finding the switch. 0 is the positive direction and 1 is the negative direction. System parameter 124 is the high speed of the axis movement for finding the switch. System parameter 125 is the low speed of the axis movement for getting out of the switch after touching the switch. Picture 3. (4) Use switch and Z signal of motor encoder to return to the zero mode: When system parameters 342 and 313 are both 0 , and system parameter 113 = 1 , after completing zero return mode 3, using the mechanical switch to return to zero, the motor will continue to rotate to find the motor encoder Z phase signal.
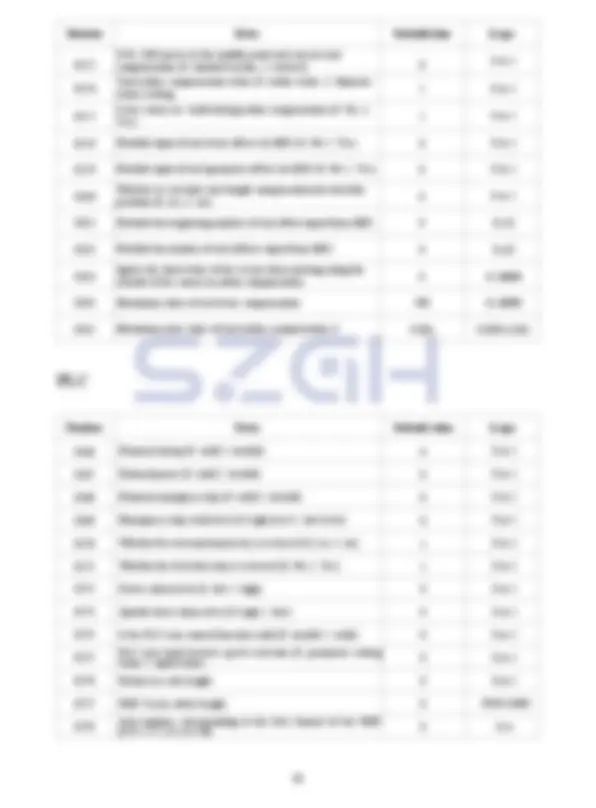
0141:Over-range alarm position 0142:Is the soft limit effective before the zero point(0:No 1:Yes) 0143:The forbidden area of the second stroke limit(0:inside 1:outside) 0144:Negative maximum stroke(first stroke limit) 0145:Forward maximum stroke(first stroke limit) 0146:Negative maximum stroke(second stroke limit) 0147:Forward maximum stroke(second stroke limit)
K011.4:Hard limit overrides the use(0: two 1: one) input K011.5:Hard limit overrides release switch type(0: normally open 1:normally close) K011.6:Hard limit over-range alarm switch type(0: normally open 1:normally close) K011.7:Hard limit over-range(0: invalid 1: effective)
Press the Parameter, F1 Common parameters, P5 Limit, the parameter from 140 to 147 are related to the limit. Parameters from 143 to 147 are about soft limit, these parameters are used to set the first travel limit and second travel limit, identify an area which is used to axis movement. Picture 4.
Pins Address Functio n Description
Picture 5.
K20.0:External start(0:normally open 1:normally close) K20.1:External pause(0:normally open 1:normally close) K20.2:External emergency stop(0:normally open 1:normally close) Picture 5.
Port Address Function Description Output1-15 Y1.4 M08 Cooling output
Port Address Function Description Output1-10 Y0.2 M16 Spindle tool release Output1-4 Y1.1 M17 Spindle tool clamping Output1-11 X1.6 THAN Clamp/release tool input
Press the parameter key and in F1(Common) parameter, press the P8 to find the M16 M17 column, and you will see these parameters K14.7:Whether to use the tool clamping device(0:No 1:Yes) K13.6:Power-on spindle tool clamping(0:No output 1:Output) K13.7:External clamp/loose tool button(0:Switch status 1:Press to release,pop up to clamp) K14.0:Spindle release position switch type(0:Normally open 1:Normally close) K14.1:Spindle clamping position switch type(0:Normally open 1:Normally close) K14.2:Tool clamping before spindle start(0:No inspection 1:Inspection) K14.3:Clamping tool in place signal(0:No inspection 1:Inspection) K14.5:Spindle tool clamping completed whether to cancel the output(0:No 1:Yes) K14.6:Spindle tool release completed whether to disconnect the output(0:No 1:Yes)
T007:Delay after the spindle tool is released into place,unit:milliseconds T008:Delay after the spindle tool is clamping into place,unit:milliseconds T009:Spindle tool clamping/releasing timeout(Detect arrival signal),unit:milliseconds T021:After the spindle stops, how long does it take to release the tool? Unit: milliseconds Picture 8.
When the K14.7 parameter is 1 to turn on the spindle tool clamping and releasing function, the K13.6 parameter sets the spindle clamping and releasing state after power-on. K13.7 is used to set the external input X1.6 to trigger the clamping and releasing mode. K14.2 sets whether to check the spindle tool clamping state before the spindle rotates. K14.3 turns on the sensor function to check whether the spindle tool clamping and releasing state are in place. K14.0 and K14.1 set the switch type to normally open or normally closed. K14.5 and K14.6 set whether to turn off the corresponding output after detecting the sensor signal. The T07 and T08 parameters set the delay for turning off the output when the clamping and releasing are in place. The T09 parameter sets the delay time for detecting the in-place signal when the control signal is output. If the sensor signal is not detected when the time is up, an alarm will be triggered. T021 is to set the interval time between the spindle stopping and the spindle clamp release command being allowed.
Port Address Function Description Input1-7 X2.7 SAGT Detect switch,execute the program after closing the door
K13.0:protective door open signal(0:normally open 1:normally close) K13.1:1/0 : Does not close/close the spindle when the door open K13.2:1/0 : Protective door function effective / ineffective Note: When K13.2=1, the protective door function is turned on, X2.7 is not logically set to 1, and the program cannot run.
Port Address Function Description Output1-2 Y1.5 WKBO Air blow
Port Address Function Description
Output2-4 Y3.1 CLPY Yello light Output2-5 Y2.7 CLPG Green light Output2-6 Y2.6 CLPR Red light
Port Address Function Description Output2-7 Y2.5 LAMP Lighting
Port Address Function Description Output2-8 Y2.4 HYXP Chip conveyor output