



Máquinas Elétricas
Departamento Regional de Rondônia




















































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Apostila base sobre máquinas elétricas.
Tipologia: Notas de estudo
1 / 131

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Departamento Regional de Rondônia
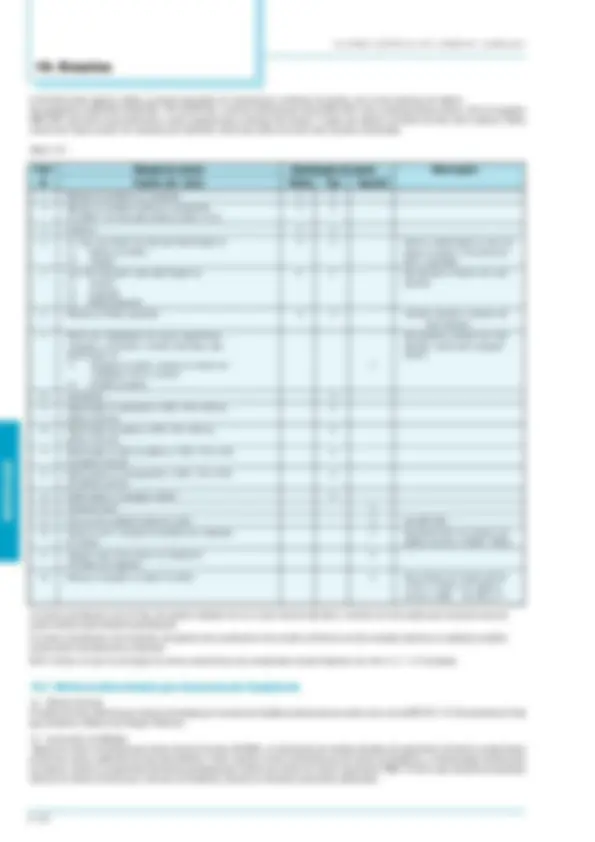
1.1 Motores elÈtricos Motor elÈtrico È a m·quina destinada a transformar energia elÈtrica em energia mec‚nica. O motor de induÁ„o È o mais usado de todos os tipos de motores, pois combina as vantagens da utilizaÁ„o de energia elÈtrica - baixo custo, facilidade de transporte, limpeza e simplicidade de comando - com sua construÁ„o simples, custo reduzido, grande versatilidade de adaptaÁ„o ‡s cargas dos mais diversos tipos e melhores rendimentos. Os tipos mais comuns de motores elÈtricos s„o:
a) Motores de corrente contÌnua S„o motores de custo mais elevado e, alÈm disso, precisam de uma fonte de corrente contÌnua, ou de um dispositivo que converta a corrente alternada
limites e se prestam a controles de grande flexibilidade e precis„o. Por isso, seu uso È restrito a casos especiais em que estas exigÍncias compensam o custo muito mais alto da instalaÁ„o.
b) Motores de corrente alternada S„o os mais utilizados, porque a distribuiÁ„o de energia elÈtrica È feita normalmente em corrente alternada. Os principais tipos s„o:
O UNIVERSO TECNOL”GICO DE MOTORES EL…TRICOS
Tabela 1.
No caso de ìresistÍnciasî, quanto maior a tens„o da rede, maior ser· a corrente e mais depressa a resistÍncia ir· se aquecer. Isto quer dizer que a potÍncia elÈtrica ser· maior. A potÍncia elÈtrica absorvida da rede, no caso da resistÍncia, È calculada multiplicando-se a tens„o da rede pela corrente, se a resistÍncia (carga), for monof·sica.
P = U x I ( W )
No sistema trif·sico a potÍncia em cada fase da carga ser· Pf = Uf x I (^) f , como se fosse um sistema monof·sico independente. A potÍncia total ser· a soma das potÍncias das trÍs fases, ou seja:
P = 3Pf = 3 x Uf x If
Lembrando que o sistema trif·sico È ligado em estrela ou tri‚ngulo, temos as seguintes relaÁıes:
LigaÁ„o estrela: U = √3 Uf e I = I (^) f
LigaÁ„o tri‚ngulo: U = U (^) f e I = √3. If
Assim, a potÍncia total, para ambas as ligaÁıes, ser·:
P = √3. U. I ( W ) OBS.: Esta express„o vale para a carga formada por resistÍncias, onde n„o h· defasagem da corrente.
b) Cargas reativas Para as ìcargas reativasî, ou seja, onde existe defasagem, como È o caso dos motores de induÁ„o, esta defasagem tem que ser levada em conta e a express„o fica:
P = √3 x U x I x cos ϕ ( W )
A unidade de medida usual para potÍncia elÈtrica È o watt (W), correspondente a 1 volt x 1 ampËre, ou seu m˙ltiplo, o quilowatt = 1.000 watts. Esta unidade tambÈm È usada para medida de potÍncia mec‚nica. A unidade de medida usual para energia elÈtrica È o quilo-watt-hora (kWh) correspondente ‡ energia fornecida por uma potÍncia de 1kW funcionando durante uma hora - È a unidade que aparece, para cobranÁa, nas contas de luz.
1.2.4 PotÍncias aparente, ativa e reativa PotÍncia aparente ( S ) … o resultado da multiplicaÁ„o da tens„o pela corrente ( S = U x I para sistemas monof·sicos e S = √3 x U x I, para sistemas trif·sicos ). Corresponde ‡ potÍncia que existiria se n„o houvesse defasagem da corrente, ou seja, se a carga fosse formada por resistÍncias. Ent„o,
P S = óóó ( V A ) cos ϕ
Evidentemente, para as cargas resistivas, cos ϕ = 1 e a potÍncia ativa se confunde com a potÍncia aparente. A unidade de medidas para potÍncia aparente È o volt-ampÈre (VA) ou seu m˙ltiplo, o quilo-volt-ampËre (kVA).
PotÍncia ativa ( P ) … a parcela da potÍncia aparente que realiza trabalho, ou seja, que È transformada em energia.
P = √3 x U x I x cos ϕ ( W ) ou, P = S. cos ϕ ( W )
PotÍncia reativa ( Q ) … a parcela da potÍncia aparente que ìn„oî realiza trabalho. Apenas È transferida e armazenada nos elementos passivos (capacitores e indutores) do circuito. Q = √3. U. I sen ϕ ( V Ar ) ou, Q = S. sen ϕ ( V Ar )
Tri‚ngulo de potÍncias
Figura 1.2 - Tri‚ngulo de potÍncias (carga indutiva)
1.2.5 Fator de potÍncia O fator de potÍncia, indicado por cos ϕ, onde ϕ È o ‚ngulo de defasagem da tens„o em relaÁ„o ‡ corrente, È a relaÁ„o entre a potÍncia real (ativa) P e a potÍncia aparente S (figura 1.2).
P P (kW) x 1000 cos ϕ = óóó = óóóóóóóóó S √3 x U. I
Assim,
Figura 1.3 - O fator de potÍncia È determinado medindo-se a potÍncia de entrada, a tens„o e a corrente de carga nominal
Import‚ncia do fator de potÍncia Visando otimizar o aproveitamento do sistema elÈtrico brasileiro, reduzindo o tr‚nsito de energia reativa nas linhas de transmiss„o, subtransmiss„o e distribuiÁ„o, a portaria do DNAEE n˙mero 85, de 25 de marÁo de 1992, determina que o fator de potÍncia de referÍncia das cargas passasse dos ent„o atuais 0,85 para 0,92. A mudanÁa do fator de potÍncia, d· maior disponibilidade de potÍncia ativa no sistema, j· que a energia reativa limita a capacidade de transporte de energia ˙til. O motor elÈtrico È uma peÁa fundamental, pois dentro das ind˙strias, representa mais de 60% do consumo de energia. Logo, È imprescindÌvel a utilizaÁ„o de motores com potÍncia e caracterÌsticas bem adequadas ‡ sua funÁ„o. O fator de potÍncia varia com a carga do motor. Os cat·logos WEG indicam os valores tÌpicos desta variaÁ„o.
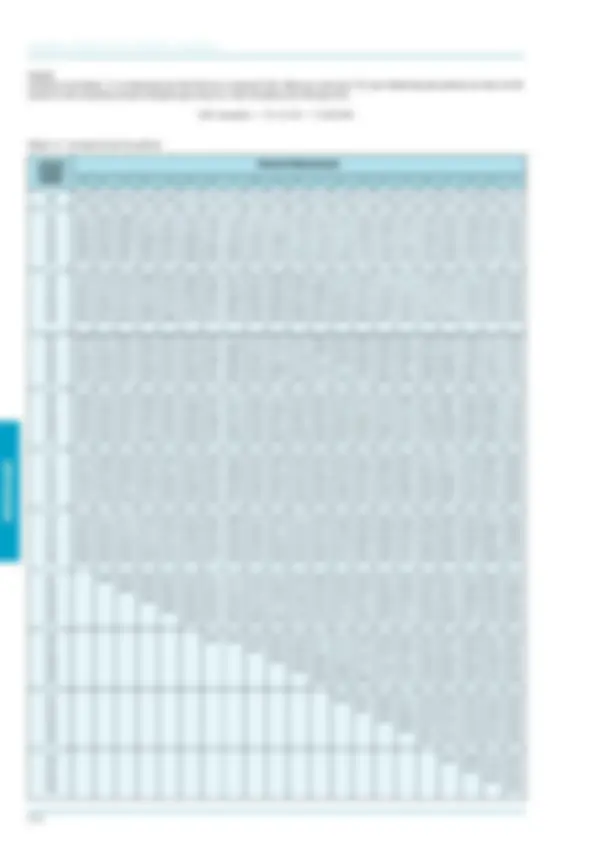
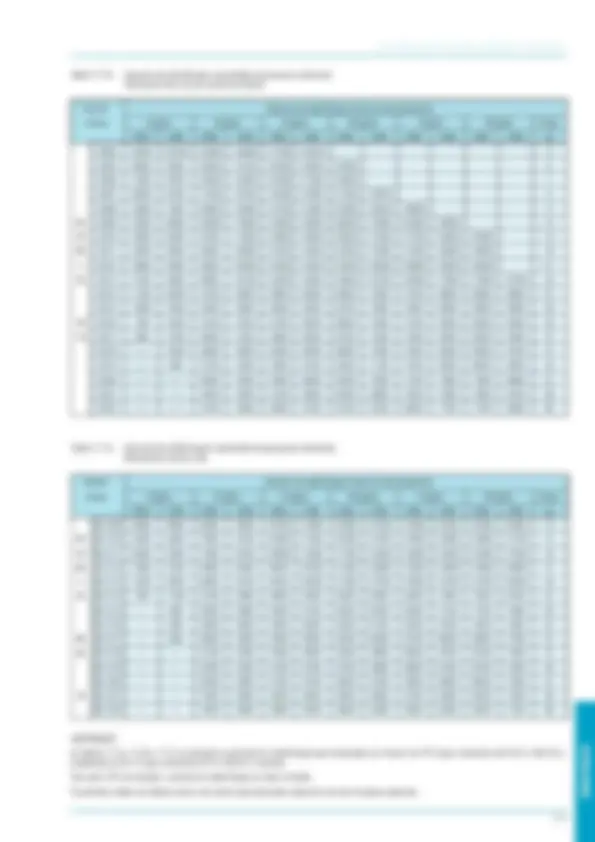
CorreÁ„o do fator de potÍncia O aumento do fator de potÍncia È realizado, com a ligaÁ„o de uma carga capacitiva, em geral, um capacitor ou motor sÌncrono super excitado, em paralelo com a carga. Por exemplo: Um motor elÈtrico, trif·sico de 100cv (75kW), operando com 100% da potÍncia nominal, com fator de potÍncia original de 0,90. O fator de potÍncia desejado È de 0,95.
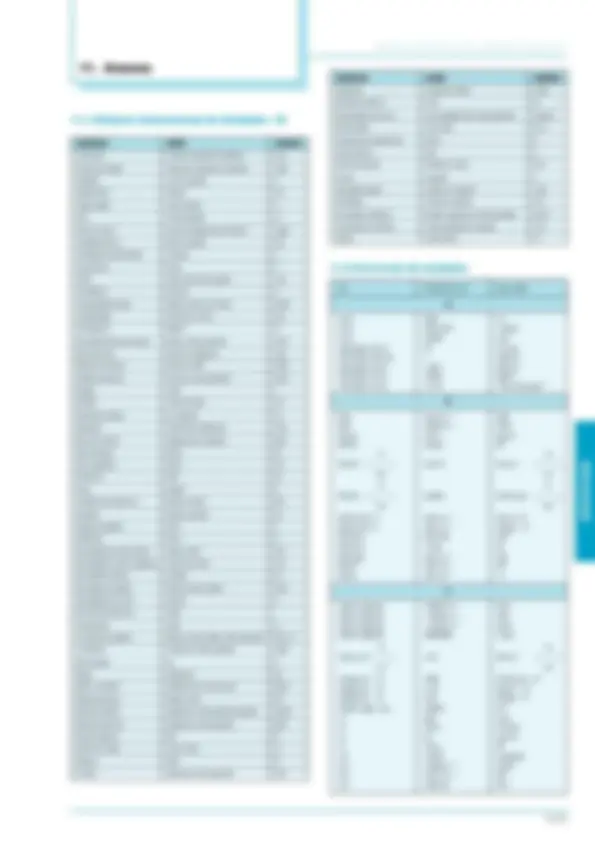
SoluÁ„o: Utilizando-se da tabela 1.2, na intersecÁ„o da linha 0,90 com a coluna de 0,95, obtÈm-se o valor de 0,155, que multiplicado pela potÍncia do motor em kW, resulta no valor da potÍncia reativa necess·ria para elevar-se o fator de potÍncia de 0,90 para 0,95. kVAr necess·rio = 75 x 0,155 = 11,625 kVAr Tabela 1.2 - CorreÁ„o do fator de potÍncia FATOR DE FATOR DE POT NCIA DESEJADO
360 o). O sistema È equilibrado, isto È, as trÍs tensıes tÍm o mesmo valor eficaz U 1 = U 2 = U 3 conforme figura 1.6.
Figura 1.
Ligando entre si os trÍs sistemas monof·sicos e eliminando os fios desnecess·rios, teremos um sistema trif·sico: trÍs tensıes U 1 , U 2 e U 3 equilibradas, defasadas entre si de 120o^ e aplicadas entre os trÍs fios do sistema. A ligaÁ„o pode ser feita de suas maneiras, representadas nos esquemas seguintes. Nestes esquemas, costuma-se representar as tensıes com setas inclinadas ou vetores girantes, mantendo entre si o ‚ngulo correspondente ‡ defasagem (120o), conforme figuras 1.7a, b e c, e figuras 1.8a, b e c.
1.4.1 LigaÁ„o tri‚ngulo Se ligarmos os trÍs sistemas monof·sicos entre si, como indicam as figuras 1.7a, b e c, podemos eliminar trÍs fios, deixando apenas um em cada ponto de ligaÁ„o, e o sistema trif·sico ficar· reduzido a trÍs fios L 1 , L (^2) e L 3.
Tens„o de linha ( U ) … a tens„o nominal do sistema trif·sico aplicada entre dois quaisquer dos trÍs fios L 1 , L 2 e L 3.
Figura 1.7a - LigaÁıes
Figura 1.7b - Esquema Figura 1.7c - Diagrama
Corrente de linha ( I) … a corrente em qualquer um dos trÍs fios L 1 , L 2 e L 3.
Tens„o e corrente de fase ( Uf e I (^) f ) … a tens„o e corrente de cada um dos trÍs sistemas monof·sicos considerados.
Examinando o esquema da figura 1.7b, vÍ-se que: U = U (^1)
I = √3. If = 1,732 I (^) f
I = I (^) f1 + If3 (figura 1.7c)
Exemplo: Temos um sistema equilibrado de tens„o nominal 220 volts. A corrente de linha medida È 10 ampÈres. Ligando a este sistema uma carga trif·sica composta de trÍs cargas iguais ligadas em tri‚ngulo, qual a tens„o e a corrente em cada uma das cargas?
Temos Uf = U 1 = 220 volts em cada uma das cargas.
Se I = 1,732. If , temos If = 0,577. I = 0,577 x 10 = 5,77 ampÈres em cada uma das cargas.
1.4.2 LigaÁ„o estrela Ligando um dos fios de cada sistema monof·sico a um ponto comum aos trÍs, os trÍs fios restantes formam um sistema trif·sico em estrela (figura 1.8a). ¿s vezes, o sistema trif·sico em estrela È ìa quatro fiosî ou ìcom neutroî. O quarto fio È ligado ao ponto comum ‡s trÍs fases. A tens„o de linha ou tens„o nominal do sistema trif·sico e a corrente de linha, s„o definidas do mesmo modo que na ligaÁ„o tri‚ngulo.
Figura 1.8a - LigaÁıes
Figura 1.8b - Esquema Figura 1.8c - Diagrama
Examinando o esquema da figura 1.8b, vÍ-se que:
I = If
U = √ 3. Uf = 1,732 Uf U = Uf 1 + Uf 2 (figura 1.8c)
Exemplo: Temos uma carga trif·sica composta de trÍs cargas iguais; cada carga È feita para ser ligada a uma tens„o de 220 volts, absorvendo 5, ampÈres. Qual a tens„o nominal do sistema trif·sico que alimenta esta carga em suas condiÁıes normais (220 volts e 5,77 ampÈres)? Qual a corrente de linha? Temos U (^) f = 220 volts (normal de cada carga) U = 1,732 x 220 = 380 volts I = If = 5,77 ampÈres
1.5 Motor de induÁ„o trif·sico O motor de induÁ„o trif·sico (figura 1.9) È composto fundamentalmente de duas partes: estator e rotor.
Figura 1.
Estator m CarcaÁa ( 1 ) - È a estrutura suporte do conjunto; de construÁ„o robusta em ferro fundido, aÁo ou alumÌnio injetado, resistente ‡ corros„o e com aletas. m N˙cleo de chapas ( 2 ) - as chapas s„o de aÁo magnÈtico, tratatas termicamente para reduzir ao mÌnimo as perdas no ferro. m Enrolamento trif·sico ( 8 ) - trÍs conjuntos iguais de bobinas, uma para cada fase, formando um sistema trif·sico ligado ‡ rede trif·sica de alimentaÁ„o.
Rotor m Eixo ( 7 ) - transmite a potÍncia mec‚nica desenvolvida pelo motor. … tratado termicamente para evitar problemas como empenamento e fadiga. m N˙cleo de chapas ( 3 ) - as chapas possuem as mesmas caracterÌsticas das chapas do estator. m Barras e anÈis de curto-circuito ( 12 ) - s„o de alumÌnio injetado sob press„o numa ˙nica peÁa.
Outras partes do motor de induÁ„o trif·sico: m Tampa ( 4 ) m Ventilador ( 5 ) m Tampa defletora ( 6 ) m Caixa de ligaÁ„o ( 9 ) m Terminais ( 10 ) m Rolamentos ( 11 )
O foco deste manual È o ìmotor de gaiolaî, cujo rotor È constituÌdo de um conjunto de barras n„o isoladas e interligadas por anÈis de curto-circuito. O que caracteriza o motor de induÁ„o È que sÛ o estator È ligado ‡ rede de alimentaÁ„o. O rotor n„o È alimentado externamente e as correntes que circulam nele, s„o induzidas eletromagneticamente pelo estator, donde o seu nome de motor de induÁ„o.
1.5.1 PrincÌpio de funcionamento - campo girante Quando uma bobina È percorrida por uma corrente elÈtrica, È criado um campo magnÈtico dirigido conforme o eixo da bobina e de valor proporcional ‡ corrente.
Figura 1.10a Figura 1.10b
a) Na figura 1.10a È indicado um ìenrolamento monof·sicoî atravessado por uma corrente I, e o campo H È criado por ela; o enrolamento È constituÌdo de um par de pÛlos (um pÛlo ìnorteî e um pÛlo ìsulî), cujos efeitos se somam para estabelecer o campo H. O fluxo magnÈtico atravessa o rotor entre os dois pÛlos e se fecha atravÈs do n˙clo do estator. Se a corrente I È alternada, o campo H tambÈm È, e o seu valor a cada instante ser· representando pelo mesmo gr·fico da figura 1.4b, inclusive invertendo o sentido em cada meio ciclo. O campo H È ìpulsanteî pois, sua intensidade ìvariaî proporcionalmente ‡ corrente, sempre na ìmesmaî direÁ„o norte-sul.
b) Na figura 1.10b È indicado um ìenrolamento trif·sicoî, que È transformado por trÍs monof·sicos espaÁados entre si de 120o. Se este enrolamento for alimentado por um sistema trif·sico, as correntes I 1 , I 2 e I 3 criar„o, do mesmo modo, os seus prÛprios campos magnÈticos H 1 , H 2 e H 3. Estes campos s„o espaÁados entre si de 120o. AlÈm disso, como s„o proporcionais ‡s respectivas correntes, ser„o defasados no tempo, tambÈm de 120o^ entre si e podem ser representandos por um gr·fico igual ao da figura 1.6. O campo total H resultante, a cada instante, ser· igual ‡ soma gr·fica dos trÍs campos H 1 , H 2 e H 3 naquele instante.
Na figura 1.11, representamos esta soma gr·fica para seis instantes sucessivos.
Figura 1.
No instante ( 1 ), a figura 1.6, mostra que o campo H 1 È m·ximo e os campos H 2 e H 3 s„o negativos e de mesmo valor, iguais a 0,5. Os trÍs campos s„o representados na figura 1.11 ( 1 ), parte superior, levando em conta que o campo negativo È representado por uma seta de sentido oposto ao que seria normal; o campo resultante (soma gr·fica) È mostrado na parte inferior da figura 1.11 ( 1 ), tendo a mesma direÁ„o do enrolamento da fase
Repetindo a construÁ„o para os pontos 2, 3, 4, 5 e 6 da figura 1.6, observa- se que o campo resultante H tem intensidade ìconstanteî, porÈm sua direÁ„o vai ìgirandoî, completando uma volta no fim de um ciclo. Assim, quando um enrolamento trif·sico È alimentado por correntes trif·sicas, cria-se um ìcampo giranteî, como se houvesse um ˙nico par de pÛlos girantes, de intensidade constante. Este campo girante, criado pelo
7
8
9 10
12 11
1
3 2
4
5
6
2.1 O sistema No Brasil, o sistema de alimentaÁ„o pode ser monof·sico ou trif·sico. O sistema monof·sico È utilizado em serviÁos domÈsticos, comerciais e rurais, enquanto o sistema trif·sico, em aplicaÁıes industriais, ambos em 60Hz.
2.1.1 Trif·sico As tensıes trif·sicas mais usadas nas redes industriais s„o: l Baixa tens„o: 220V, 380V e 440V l MÈdia tens„o: 2.300 V, 4.160 V e 6.600 V O sistema trif·sico estrela de baixa tens„o, consiste de trÍs condutores de fase (L1, L2, L3) e o condutor neutro (N), sendo este, conectado ao ponto estrela do gerador ou secund·rio dos transformadores (conforme mostra figura 2.1).
Figura 2.1 - Sistema trif·sico
2.1.2 Monof·sico As tensıes monof·sicas padronizadas no Brasil s„o as de 115V (conhecida como 110V), 127V e 220V. Os motores monof·sicos s„o ligados ‡ duas fases (tens„o de linha UL ) ou ‡ uma fase e o neutro (tens„o de fase Uf ). Assim, a tens„o nominal do motor monof·sico dever· ser igual ‡ tens„o UL ou Uf do sistema. Quando v·rios motores monof·sicos s„o conectados ao sistema trif·sico (formado por trÍs sistemas monof·sicos), deve-se tomar o cuidado para distribuÌ-los de maneira uniforme, evitando-se assim, desequilÌbrio entre as fases.
Monof·sico com retorno por terra - MRT O sistema monof·sico com retorno por terra - MRT -, È um sistema elÈtrico em que a terra funciona como condutor de retorno da corrente de carga. Afigura-se como soluÁ„o para o emprego no monof·sico a partir de alimentadores que n„o tÍm o condutor neutro. Dependendo da natureza do sistema elÈtrico existente e caracterÌsticas do solo onde ser· implantado (geralmente na eletrificaÁ„o rural), tem-se:
a) Sistema monofilar … a vers„o mais pr·tica e econÙmica do MRT, porÈm, sua utilizaÁ„o sÛ È possÌvel onde a saÌda da subestaÁ„o de origem È estrela-tri‚ngulo. Figura 2.2 - Sistema monofilar
b) Sistema monofilar com transformador de isolamento Este sistema possui algumas desvantagens, alÈm do custo do transformador,
como:
Figura 2.3 - Sistema monofilar com transformador de isolamento
c) Sistema MRT na vers„o neutro parcial … empregado como soluÁ„o para a utilizaÁ„o do MRT em regiıes de solos de alta resistividade, quando se torna difÌcil obter valores de resistÍncia de terra dos transformadores dentro dos limites m·ximos estabelecidos no projeto.
Figura 2.4 - Sistema MRT na vers„o neutro parcial
2.2 Tens„o nominal … a tens„o para a qual o motor foi projetado.
2.2.1 Tens„o nominal m˙ltipla A grande maioria dos motores È fornecida com terminais do enrolamento relig·veis, de modo a poderem funcionar em redes de pelo menos duas tensıes diferentes. Os principais tipos de religaÁ„o de terminais de motores para funcionamento em mais de uma tens„o s„o:
a) LigaÁ„o sÈrie-paralela O enrolamento de cada fase È dividido em duas partes (lembrar que o n˙mero de pÛlos È sempre par, de modo que este tipo de ligaÁ„o È sempre possÌvel). Ligando as duas metades em sÈrie, cada metade ficar· com a metade da tens„o de fase nominal do motor. Ligando as duas metades em paralelo, o motor poder· ser alimentado com uma tens„o igual ‡ metade da tens„o anterior, sem que se altere a tens„o aplicada a cada bobina. Veja os exemplos das figuras 2.5a e b.
Figura 2.5a - LigaÁ„o sÈrie-paralelo Y
Figura 2.5b - LigaÁ„o sÈrie-paralelo ∆
Este tipo de ligaÁ„o exige nove terminais no motor e a tens„o nominal (dupla) mais comum, È 220/440V, ou seja, o motor È religado na ligaÁ„o paralela quando alimentado com 220V e na ligaÁ„o sÈrie quando alimentado em 440V. A figura 2.1 mostra a numeraÁ„o normal dos terminais e o esquema de ligaÁ„o para estes tipos de motores, tanto para motores ligados em estrela como em tri‚ngulo. O mesmo esquema serve para outras duas tensıes quaisquer, desde que uma seja o dobro da outra, por exemplo, 230/ 460V
b) LigaÁ„o estrela-tri‚ngulo O enrolamento de cada fase tem as duas pontas trazidas para fora do motor. Se ligarmos as trÍs fases em tri‚ngulo, cada fase receber· a tens„o da linha, por exemplo, 220V (figura 2.6). Se ligarmos as trÍs fases em estrela, o motor pode ser ligado a uma linha de tens„o igual a 220 x √3 = 380 volts sem alterar a tens„o no enrolamento que continua igual a 220 volts por fase, pois, Uf = U √ 3
Figura 2.6 - LigaÁ„o estrela-tri‚ngulo Y - ∆
Este tipo de ligaÁ„o exige seis terminais no motor e serve para quaisquer tensıes nominais duplas, desde que a segunda seja igual ‡ primeira multiplicada por √3. Exemplos: 220/380V - 380/660V - 440/760V
Nos exemplos 380/660V e 440/760V, a tens„o maior declarada sÛ serve para indicar que o motor pode ser acionado atravÈs de uma chave de partida estrela-tri‚ngulo. Motores que possuem tens„o nominal de operaÁ„o acima de 660V dever„o possuir um sistema de isolaÁ„o especial, apto a esta condiÁ„o.
c) Tripla tens„o nominal Podemos combinar os dois casos anteriores: o enrolamento de cada fase È dividido em duas metades para ligaÁ„o sÈrie-paralelo. AlÈm disso, todos os terminais s„o acessÌveis para podermos ligar as trÍs fases em estrela ou tri‚ngulo. Deste modo, temos quatro combinaÁıes possÌveis de tens„o nominal:
LigaÁ„o tri‚ngulo paralelo;
LigaÁ„o estrela paralela, sendo igual a √3 vezes a primeira;
LigaÁ„o tri‚ngulo sÈrie, valendo o dobro da primeira;
LigaÁ„o estrela sÈrie, valendo √3 vezes a terceira. Mas, como esta tens„o seria maior que 600V, È indicada apenas como referÍncia de ligaÁ„o estrela-tri‚ngulo. Exemplo: 220/380/440(760) V
Este tipo de ligaÁ„o exige 12 terminais e a figura 2.7 mostra a numeraÁ„o normal dos terminais e o esquema de ligaÁ„o para as trÍs tensıes nominais.
Figura 2.
2.3 Freq¸Íncia nominal (Hz) … a freq¸Íncia da rede para a qual o motor foi projetado.
2.3.1 LigaÁ„o em freq¸Íncias diferentes Motores trif·sicos bobinados para 50Hz poder„o ser ligados tambÈm em rede de 60Hz.
a) Ligando o motor de 50Hz, com a mesma tens„o, em 60Hz
Nota: Dever„o ser observados os valores de potÍncia requeridas, para motores que acionam equipamentos que possuem conjugados vari·veis com a rotaÁ„o.
b) Se alterar a tens„o em proporÁ„o ‡ freq¸Íncia:
Quando o motor for ligado em 60Hz com a bobinagem 50Hz, poderemos aumentar a potÍncia em 15% para II pÛlos e 20% para IV, VI e VIII pÛlos.
2.4 Toler‚ncia de variaÁ„o de tens„o e freq¸Íncia Conforme norma NBR 7094:1996 (cap. 4 - item 4.3.3). Para os motores de induÁ„o, as combinaÁıes das variaÁıes de tens„o e de freq¸Íncia s„o classificadas como Zona A ou Zona B, conforme figura 2.8.
Na figura 2.11 temos o motor com as mesmas caracterÌsticas, porÈm, o conjugado resistente Cr È bem menor. Na ligaÁ„o Y, o motor acelera a carga atÈ 95% da rotaÁ„o nominal. Quando a chave È ligada em ∆, a corrente, que era de aproximadamente 50%, sobe para 170%, ou seja, praticamente igual a da partida em Y. Neste caso, a ligaÁ„o estrela-tri‚ngulo apresenta vantagem, porque se fosse ligado direto, absorveria da rede 600% da corrente nominal. A chave estrela-tri‚ngulo em geral sÛ pode ser empregada em partidas da m·quina em vazio, isto È, sem carga. Somente depois de ter atingido pelo menos 90% da rotaÁ„o nominal, a carga poder· ser aplicada. O instante da comutaÁ„o de estrela para tri‚ngulo deve ser criteriosamente determinado, para que este mÈtodo de partida possa efetivamente ser vantajoso nos casos em que a partida direta n„o È possÌvel. No caso de motores tripla tens„o nominal (220/380/440/760V), deve-se optar pela ligaÁ„o 220/380V ou 440/(760)V, dependendo da rede de alimentaÁ„o.
Figura 2. I ∆ - corrente em tri‚ngulo IY - corrente em estrela C ∆ - conjugado em tri‚ngulo CY - conjugado em estrela C/Cn - relaÁ„o entre o conjugado do motor e o conjugao nominal I/I (^) n - relaÁ„o entre a corrente de partida e a corrente nominal Cr - conjugado resistente
Esquematicamente, a ligaÁ„o estrela-tri‚ngulo num motor para uma rede de 220V È feita da maneira indicada na figura 2.12, notando-se que a tens„o por fase durante a partida È reduzida para 127V.
Figura 2.
2.5.2 Partida com chave compensadora (auto- transformador) A chave compensadora pode ser usada para a partida de motores sob carga. Ela reduz a corrente de partida, evitando uma sobrecarga no circuito, deixando, porÈm, o motor com um conjugado suficiente para a partida e
aceleraÁ„o. A tens„o na chave compensadora È reduzida atravÈs de autotransformador que possui normalmente taps de 50, 65 e 80% da tens„o nominal. Para os motores que partirem com uma tens„o menor que a tens„o nominal, a corrente e o conjugado de partida devem ser multiplicados pelos fatores K 1 (fator de multiplicaÁ„o da corrente) e K 2 (fator de multiplicaÁ„o do conjugado) obtidos no gr·fico da figura 2.13.
RELA«√O DE TENS’ES
Figura 2.13 - Fatores de reduÁ„o K 1 e K 2 em funÁ„o das relaÁıes de tens„o do motor e da rede Um /Un
Exemplo: Para 85% da tens„o nominal
Ip Ip Ip ( óó ) = K1. ( óó ) = 0,8 ( óó ) In 85% In 100% In 100%
C C C ( óó ) = K2. ( óó ) = 0,66 ( óó ) C (^) n 85% C (^) n 100% C (^) n 100%
Figura 2.14 - Exemplo das caracterÌsticas de desempenho de um motor de 425cv, VI pÛlos, quando parte com 85% da tens„o
2.5.3 ComparaÁ„o entre chaves estrela- tri‚ngulo e compensadoras ìautom·ticasî
Desvantagens a) A chave sÛ pode ser aplicada a motores cujos seis bornes ou terminais sejam acessÌveis. b) A tens„o da rede deve coincidir com a tens„o em tri‚ngulo do motor. c) Com a corrente de partida reduzida para aproximadamente 1/3 da corrente nominal, reduz-se tambÈm o momento de partida para 1/3. d) Caso o motor n„o atingir pelo menos 90% de sua velocidade nominal, o pico de corrente na comutaÁ„o de estrela para tri‚ngulo ser· quase como se fosse uma partida direta, o que se torna prejudicial aos contatos dos contatores e n„o traz nenhuma vantagem para a rede elÈtrica.
Desvantagens a) A grande desvantagem È a limitaÁ„o de sua freq¸Íncia de manobras. Na chave compensadora autom·tica È sempre necess·rio saber a sua freq¸Íncia de manobra para determinar o auto-transformador de acordo. b) A chave compensadora È bem mais cara do que a chave estrela-tri‚ngulo, devido ao auto-transformador. c) Devido ao tamanho do auto-transformador, a construÁ„o se torna volumosa, necessitando quadros maiores, o que torna o seu preÁo elevado.
2.5.4 Partida com chave sÈrie-paralelo Para partida em sÈrie-paralelo È necess·rio que o motor seja relig·vel para duas tensıes, a menor delas igual a da rede e a outra duas vezes maior. Este tipo de ligaÁ„o exige nove terminais no motor e a tens„o nominal mais comum È 220/440V, ou seja: durante a partida o motor È ligado na configuraÁ„o sÈrie atÈ atingir sua rotaÁ„o nominal e, ent„o, faz-se a comutaÁ„o para a configuraÁ„o paralelo.
2.5.5 Partida eletrÙnica (soft-starter) O avanÁo da eletrÙnica permitiu a criaÁ„o da chave de partida a estado sÛlido, a qual consiste de um conjunto de pares de tiristores (SCR) (ou combinaÁıes de tiristores/diodos), um em cada borne de potÍncia do motor. O ‚ngulo de disparo de cada par de tiristores È controlado eletronicamente para aplicar uma tens„o vari·vel aos terminais do motor durante a aceleraÁ„o. No final do perÌodo de partida, ajust·vel tipicamente entre 2 e 30 segundos, a tens„o atinge seu valor pleno apÛs uma aceleraÁ„o suave ou uma rampa ascendente, ao invÈs de ser submetido a incrementos ou saltos repentinos. Com isso, consegue-se manter a corrente de partida (na linha) prÛxima da nominal e com suave variaÁ„o. AlÈm da vantagem do controle da tens„o (corrente) durante a partida, a chave eletrÙnica apresenta, tambÈm, a vantagem de n„o possuir partes mÛveis ou que gerem arco, como nas chaves mec‚nicas. Este È um dos pontos fortes das chaves eletrÙnicas, pois sua vida ˙til torna-se mais longa.
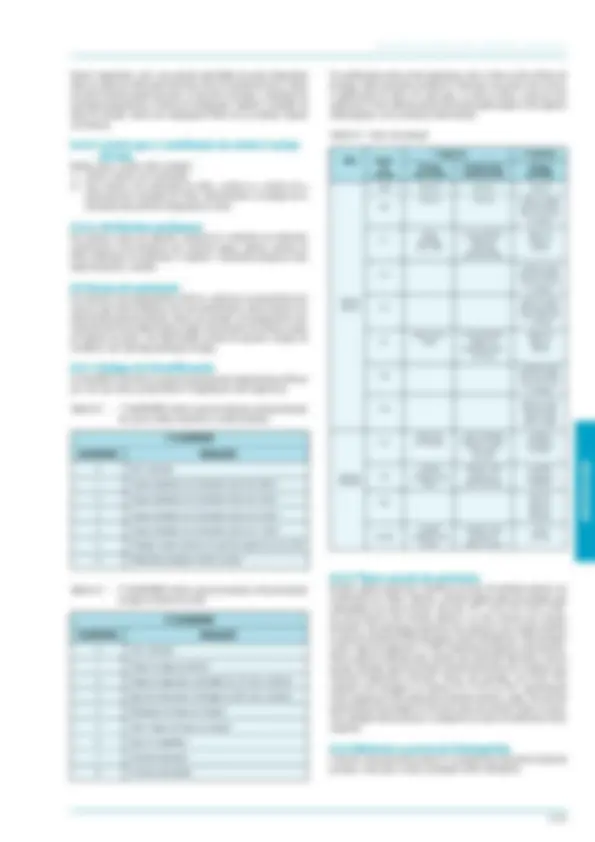
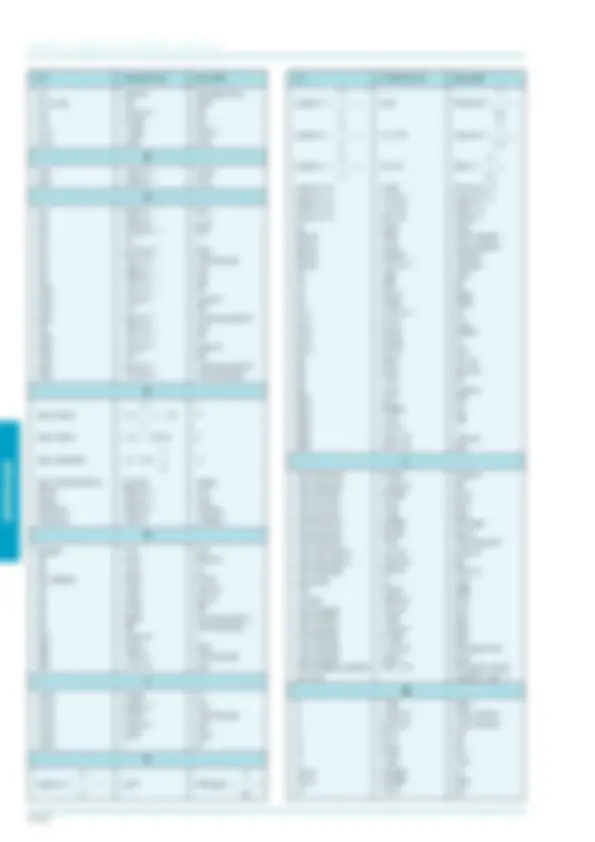
Tabela 2.1 - MÈtodos de Partida x Motores
ExecuÁ„o Tens„o Partida Partida Partida Partida dos de com chave com chave com chave com enrolamentos serviÁo estrela- compensadora sÈrie- Soft-starter tri‚ngulo paralela 220/380 220V SIM SIM N√O SIM 380V N√O SIM N√O SIM 220/440/230/460 220V/230V/ N√O SIM SIM SIM 440V/460V N√O SIM N√O SIM 380/660 380V SIM SIM N√O SIM 220/380/440/760 220V SIM SIM SIM SIM 380 N√O SIM N√O SIM 440 SIM SIM N√O SIM
2.6 Sentido de rotaÁ„o de motores de induÁ„o trif·sicos Um motor de induÁ„o trif·sico trabalhar· em qualquer sentido dependendo da conex„o com a fonte elÈtrica. Para inverter o sentido de rotaÁ„o, inverte- se qualquer par de conexıes entre motor e fonte elÈtrica. Os motores WEG possuem ventilador bidirecional, proporcionando sua operaÁ„o em qualquer sentido de rotaÁ„o, sem prejudicar a refrigeraÁ„o do motor.
previstos para partida estrela-tri‚ngulo. Para estes motores na ligaÁ„o estrela, os valores mÌnimos do conjugado com rotor bloqueado e do conjugado mÌnimo de partida s„o iguais a 25% dos valores indicados para os motores categoria N.
Categoria HY Esta categoria inclui os motores semelhantes aos de categoria H, porÈm. previstos para partida estrela-tri‚ngulo. Para estes motores na ligaÁ„o estrela, os valores mÌnimos do conjugado com rotor bloqueado e do conjugado mÌnimo de partida s„o iguais a 25% dos valores indicados para os motores de categoria H.
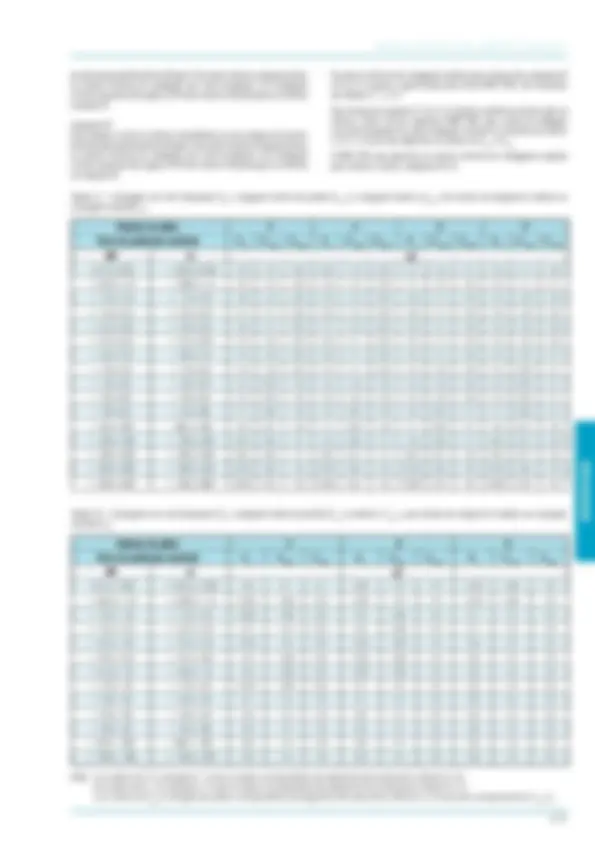
Os valores mÌnimos de conjugado exigidos para motores das categorias N e H (4, 6 e 8 pÛlos), especificados pela norma NBR 7094, s„o mostrados nas tabelas 3.1 e 3.2.
Para motores da categoria D, de 4, 6 e 8 pÛlos e potÍncia nominal igual ou inferior a 150cv, tem-se, segundo a NBR 7094, que: a raz„o do conjugado com rotor bloqueado (Cp ) para conjugado nominal (Cn) n„o deve ser inferior a 2,75. A norma n„o especifica os valores de CmÌn e Cm·x. A NBR 7094 n„o especifica os valores mÌnimos de conjugados exigidos para motores 2 pÛlos, categorias H e D.
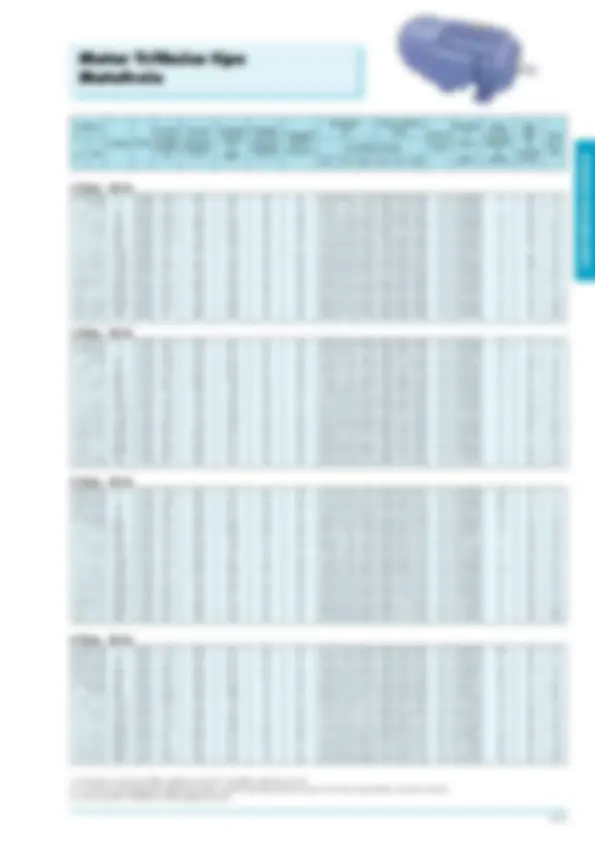
Tabela 3.1 - Conjugado com rotor bloqueado (C (^) p ), conjugado mÌnimo de partida (C (^) min ) e conjugado m·ximo (Cm·x ) de motores de categoria N, relativos ao conjugado nominal (Cn ).
N˙mero de pÛlos 2 4 6 8 Faixa de potÍncias nominais C (^) p C (^) mÌn C (^) m·x C (^) p C (^) mÌn C (^) m·x C (^) p C (^) mÌn C (^) m·x C (^) p C (^) mÌn C (^) m·x kW cv pu
0,4 ≤ 0,63 > 0,54 ≤ 0,63 1,9 1,3 2,0 2,0 1,4 2,0 1,7 1,2 1,7 1,5 1,1 1, 0,63 ≤ 1,0 > 0,86 ≤ 1,4 1,8 1,2 2,0 1,9 1,3 2,0 1,7 1,2 1,8 1,5 1,1 1, 1,0 ≤ 1,6 > 1,4 ≤ 2,2 1,8 1,2 2,0 1,9 1,3 2,0 1,6 1,1 1,9 1,4 1,0 1, 1,6 ≤ 2,5 > 2,2 ≤ 3,4 1,7 1,1 2,0 1,8 1,2 2,0 1,6 1,1 1,9 1,4 1,0 1, 2,5 ≤ 4,0 > 3,4 ≤ 5,4 1,6 1,1 2,0 1,7 1,2 2,0 1,5 1,1 1,9 1,3 1,0 1, 4,0 ≤ 6,3 > 5,4 ≤ 8,6 1,5 1,0 2,0 1,6 1,1 2,0 1,5 1,1 1,9 1,3 1,0 1, 6,3 ≤ 10 > 8,6 ≤ 14 1,5 1,0 2,0 1,6 1,1 2,0 1,5 1,1 1,8 1,3 1,0 1, 10 ≤ 16 > 14 ≤ 22 1,4 1,0 2,0 1,5 1,1 2,0 1,4 1,0 1,8 1,2 0,9 1, 16 ≤ 25 > 22 ≤ 34 1,3 0,9 1,9 1,4 1,0 1,9 1,4 1,0 1,8 1,2 0,9 1, 25 ≤ 40 > 34 ≤ 54 1,2 0,9 1,9 1,3 1,0 1,9 1,3 1,0 1,8 1,2 0,9 1, 40 ≤ 63 > 54 ≤ 86 1,1 0,8 1,8 1,2 0,9 1,8 1,2 0,9 1,7 1,1 0,8 1, 63 ≤ 100 >86 ≤ 140 1,0 0,7 1,8 1,1 0,8 1,8 1,1 0,8 1,7 1,0 0,7 1, 100 ≤ 160 > 140 ≤ 220 0,9 0,9 1,7 1,0 0,8 1,7 1,0 0,8 1,7 0,9 0,7 1, 160 ≤ 250 > 220 ≤ 340 0,8 0,6 1,7 0,9 0,7 1,7 0,9 0,7 1,6 0,9 0,7 1, 250 ≤ 400 > 340 ≤ 540 0,75 0,6 1,6 0,75 0,6 1,6 0,75 0,6 1,6 0,75 0,6 1, 400 ≤ 630 > 540 ≤ 860 0,65 0,5 1,6 0,65 0,5 1,6 0,65 0,5 1,6 0,65 0,6 1,
Tabela 3.2 ñ Conjugado com rotor bloqueado (C (^) p ), conjugado mÌnimo de partida (C (^) mÌn ) e m·ximo ( C (^) m·x ), para motores de categoria H, relativos ao conjugado nominal (C (^) n ).
N˙mero de pÛlos 4 6 8 Faixa de potÍncias nominais C (^) p C (^) mÌn C (^) m·x C (^) p C (^) mÌn C (^) m·x C (^) p C (^) mÌn C (^) m·x kW cv pu
0,4 ≤ 0,63 > 0,54 ≤ 0,63 3,0 2,1 2,1 2,55 1,8 1,9 2,25 1,65 1, 0,63 ≤ 1,0 > 0,86 ≤ 1,4 2,85 1,95 2,0 2,55 1,8 1,9 2,25 1,65 1, 1,0 ≤ 1,6 > 1,4 ≤ 2,2 2,85 1,95 2,0 2,4 1,65 1,9 2,1 1,5 1, 1,6 ≤ 2,5 > 2,2 ≤ 3,4 2,7 1,8 2,0 2,4 1,65 1,9 2,1 1,5 1, 2,5 ≤ 4,0 > 3,4 ≤ 5,4 2,55 1,8 2,0 2,25 1,65 1,9 2,0 1,5 1, 4,0 ≤ 6,3 > 5,4 ≤ 8,6 2,4 1,65 2,0 2,25 1,65 1,9 2,0 1,5 1, 6,3 ≤ 10 > 8,6 ≤ 14 2,4 1,65 2,0 2,25 1,65 1,9 2,0 1,5 1, 10 ≤ 16 > 14 ≤ 22 2,25 1,65 2,0 2,1 1,5 1,9 2,0 1,4 1, 16 ≤ 25 > 22 ≤ 34 2,1 1,5 1,9 2,1 1,5 1,9 2,0 1,4 1, 25 ≤ 40 > 34 ≤ 54 2,0 1,5 1,9 2,0 1,5 1,9 2,0 1,4 1, 40 ≤ 63 > 54 ≤ 86 2,0 1,4 1,9 2,0 1,4 1,9 2,0 1,4 1, 63 ≤ 100 >86 ≤ 140 2,0 1,4 1,9 2,0 1,4 1,9 2,0 1,4 1, 100 ≤ 160 > 140 ≤ 220 2,0 1,4 1,9 2,0 1,4 1,9 2,0 1,4 1,
Notas: a) os valores de C (^) p /Cn s„o iguais a 1, 5 vezes os valores correspondentes da categoria N, n„o sendo porÈm, inferiores a 2,0; b) os valores de CmÌn /Cn s„o iguais a 1,5 vezes os valores correspondentes da categoria N, n„o sendo porÈm, inferiores a 1,4; c) os valores de Cm·x /C (^) n s„o iguais aos valores correspondentes da categoria N, n„o sendo porÈm, inferiores a 1,9 ou ao valor correspondente de C (^) mÌn /Cn.
3.1.3 CaracterÌsticas dos motores WEG Embora os motores WEG sejam, na sua maioria, declarados como pertencendo ‡ categoria N, a exemplo da maioria dos motores encontrados no mercado, os valores reais tÌpicos dos conjugados excedem em muito os exigidos em norma. Na maioria dos casos excedem atÈ mesmo, os mÌnimos exigidos para a categoria H. Isto significa uma curva conjugado x velocidade bastante alta, trazendo as seguintes vantagens:
3.2 InÈrcia da carga O momento de inÈrcia da carga acionada È uma das caracterÌsticas fundamentais para verificar, atravÈs do tempo de aceleraÁ„o, se o motor consegue acionar a carga dentro das condiÁıes exigidas pelo ambiente ou pela estabilidade tÈrmica do material isolante. Momento de inÈrcia È uma medida da resistÍncia que um corpo oferece a uma mudanÁa em seu movimento de rotaÁ„o em torno de um dado eixo. Depende do eixo em torno do qual ele est· girando e, tambÈm, da forma do corpo e da maneira como sua massa est· distribuÌda. A unidade do momento de inÈrcia È kgm^2. O momento de inÈrcia total do sistema È a soma dos momentos de inÈrcia da carga e do motor ( Jt = Jm + Jc ). No caso de uma m·quina que tem ìrotaÁ„o diferente do motorî (por exemplo, nos casos de acionamento por polias ou engrenagens), dever· ser referida a rotaÁ„o nominal do motor conforme abaixo:
MOMENTO DE IN…RCIA EM ROTA«’ES DIFERENTES
Figura 3.3 - Momento de inÈrcia em rotaÁıes diferentes
N (^) c Jce = Jc ( óó ) 2 ( kgm^2 ) N (^) n
Figura 3.4 - Momento de inÈrcia em velocidades diferentes
N (^) c N 1 N 2 N (^3) Jce = Jc( óó ) 2 + J 1 ( óó )^2 + J 2 ( óó )^2 + J 3 ( óó )^2 N (^) n N (^) n N (^) n N (^) n
onde: J (^) ce - Momento de inÈrcia da carga referido ao eixo do motor J (^) c - Momento de inÈrcia da carga N (^) c - RotaÁ„o da carga N (^) n - RotaÁ„o nominal do motor
Jt = Jm + Jce A inÈrcia total de uma carga È um importante fator para a determinaÁ„o do tempo de aceleraÁ„o.
3.3 Tempo de aceleraÁ„o Para verificar se o motor consegue acionar a carga, ou para dimensionar uma instalaÁ„o, equipamento de partida ou sistema de proteÁ„o, È necess·rio saber o tempo de aceleraÁ„o (desde o instante em que o equipamento È acionado atÈ ser atingida a rotaÁ„o nominal). O tempo de aceleraÁ„o pode ser determinado de maneira aproximada pelo conjugado mÈdio de aceleraÁ„o.
2 π. rps. Jt 2 π. rps. ( Jm + Jce ) ta = óóóóóó = óóóóóóóóó C (^) a ( Cmmed - Crmed )
t (^) a - tempo de aceleraÁ„o em segundos J (^) t - momento de inÈrcia total em kgm^2 rps - rotaÁ„o nominal em rotaÁıes por segundo C (^) mmed - conjugado mÈdio de aceleraÁ„o do motor em N.m. C (^) rmed - conjugado mÈdio de aceleraÁ„o de carga referido a eixo em N.m. J (^) m - momento de inÈrcia do motor J (^) ce - momento de inÈrcia da carga referido ao eixo C (^) a - conjugado mÈdio de aceleraÁ„o
O conjugado mÈdio de aceleraÁ„o obtÈm-se a partir da diferenÁa entre o conjugado do motor e o conjugado da carga. Seu valor deveria ser calculado para cada intervalo de rotaÁ„o (a somatÛria dos intervalos forneceria o tempo total de aceleraÁ„o). PorÈm, na pr·tica, È suficiente que se calcule graficamente o conjugado mÈdio, isto È, a diferenÁa entre a mÈdia do conjugado do motor e a mÈdia do conjugado da carga. Essa mÈdia pode ser obtida, graficamente, bastando que se observe que a soma das ·reas A 1 e A 2 seja igual a ·rea A 3 e que a ·rea B 1 seja igual a ·rea B 2 (ver figura 3.5).
C (^) n = Conjugado nominal Cm = Conjugado do motor C (^) r = Conjugado da carga Ca = Conjugado mÈdio de aceleraÁ„o N (^) n = RotaÁ„o nominal
Figura 3.5 - DeterminaÁ„o gr·fica do conjugado mÈdio de aceleraÁ„o