Baixe Protocolo cam e outras Notas de estudo em PDF para Cultura, somente na Docsity!
IMPLEMENTAÇÃO E ANÁLISE DE UMA REDE CAN PARA
CONTROLE DE UM SISTEMA DISTRIBUÍDO
Jadsonlee da Silva Sá*
[email protected]
Péricles Rezende Barros*
[email protected]
José Sérgio da Rocha Neto*
[email protected] *Departamento de Engenharia Elétrica Universidade Federal de Campina Grande
Abstract
In this work is presented an implementation of a CAN network that monitors and controls a distributed system in a decentralized way and to evaluate the advantages and disadvantages obtained in the use
of an architecture distributed in relation to a centralized architecture. The CAN nodes implemented
possess different architectures in terms of unit of control. The process is constituted by a subsystem of temperature control, an illumination subsystem and a subsystem of control of the duty cycle of two signs PWM.
Resumo
Neste trabalho apresenta-se uma implementação de uma rede CAN para monitorar e controlar um sistema distribuído de forma descentralizada e avaliar as vantagens e desvantagens obtidas na utilização de uma arquitetura distribuída em relação a uma arquitetura centralizada. Os nós CAN implementados possuem arquiteturas diferentes em termos de unidade de controle. O processo é constituído por um subsistema de controle de temperatura, um subsistema de iluminação e um subsistema de controle do ciclo de trabalho de dois sinais PWM.
Palavras Chaves: CAN, Protocolos de comunicação, Sistemas distribuídos.
1 INTRODUÇÃO
Devido o aumento do tamanho e da complexidade dos processos, a quantidade de sensores e atuadores requisitados e o comprimento das conecções necessárias em um sistema com controle centralizado aumentaram. Para garantir confiabilidade e rápidas respostas de controle do sistema, houve a necessidade de descentralizar a comunicação entre os dispositivos distribuindo o sistema em vários subsistemas inteligentes e adotando uma comunicação em rede de modo a obter um controle final do sistema. A escolha por uma solução em rede permite um conjunto de benefícios em relação a uma solução centralizada [1], tais como: menos fios no sistema, o que torna a fiação mais simples e barata; ligações curtas a sensores analógicos sensíveis a ruído elétrico; sistema flexível; fácil manutenção do sistema e; cada unidade pode ser desenvolvida e testada individualmente de acordo com os requisitos exigidos pelo sistema. Atualmente existem diversos protocolos de comunicação que são utilizadas no controle de sistemas distribuídos. CAN ( Controller Area Network ) [2-3] é um dos protocolos que vêm ganhando maior aceitação no mercado. Desenvolvido pela empresa Bosch na década de 80 com o objetivo de simplificar os complexos sistemas de fios em veículos com sistemas de controle. Por ser uma rede de baixo custo, atuação eficiente em ambientes ruidosos e oferece os requisitos para controlar sistemas distribuídos em tempo real, ela está sendo utilizada em outras áreas da engenharia que necessitam de monitoração e controle. O propósito deste trabalho é verificar as vantagens que se obtêm utilizando uma arquitetura distribuída em relação a uma arquitetura centralizada. Para demonstrá-lo, foi implementada uma rede CAN para monitorar e controlar um processo que é constituído por: um subsistema de controle de
temperatura, um subsistema de iluminação e um subsistema de controle do ciclo de trabalho de dois sinais PWM. Cada nó CAN foi implementado com uma arquitetura diferente em termos de unidade de controle, utilizou-se microconversores (ADuC812) em dois dos nós CAN, e em outro um DSP (TMS320LF2407A) como unidade de processamento e controle, em um outro nó da estrutura implementada tem-se um computador pessoal (PC) com uma placa controladora CAN (PCICAN-D) localizada no seu barramento PCI, objetivando-se avaliar as vantagens e desvantagens destas tecnologias na implementação de uma rede CAN. Na seção 2 deste trabalho apresenta-se o conceito de sistemas distribuídos; na seção 3 apresenta-se algumas características da rede CAN; na seção 4 descreve-se o sistema implementado; na seção 5 apresentam-se os resultados obtidos e na seção 6 as conclusões e propostas para trabalhos futuros.
2 SISTEMAS DISTRIBUÍDOS
Sistemas distribuídos são constituídos de diversos componentes de hardware e software que desempenham tarefas específicas e trocam informações através de uma rede de comunicações. O uso de tais sistemas tem se expandido nos últimos anos principalmente devido ao contínuo barateamento e disponibilidade de hardware , bem como de meios físicos de comunicação. Basicamente, um sistema distribuído pode ser representado como ilustrado na Figura 1. Vários módulos (nós) se comunicam via um barramento. Esses módulos possuem microcontroladores, os quais fazem o monitoramento e controle de partes do processo através de sensores e atuadores conectados a eles.
Figura 1 – Representação de um sistema distribuído.
Em um sistema centralizado, todos os sinais dos sensores e atuadores são conectados a uma unidade de processamento central, onde todos os sinais são processados e analisados. Nos sistemas distribuídos, essas ações são divididas entre módulos de processamento e transmitidas entre eles via uma rede de comunicações. Na Figura 2 está ilustrado um exemplo de sistema com processamento centralizado e de um sistema com processamento distribuído.
Figura 2 - Sistema com processamento centralizado (a) e com sistema distribuído (b).
elétrica e outros. Em geral, CAN é utilizado em aplicações onde vários subsistemas inteligentes precisam se comunicar.
3.1 Características
Os termos protocolo CAN e rede CAN são utilizados de forma intercambiáveis. Cada ponto de acesso na rede é definido como sendo um nó CAN. O protocolo CAN utiliza uma comunicação serial multi-mestre, isto é, vários nós podem pedir acesso ao meio de transmissão em simultâneo. Este protocolo suporta também a comunicação broadcast , o qual permite que uma mensagem seja transmitida a um conjunto de receptores simultaneamente. CAN é uma rede CSMA/DCR ( Carrier Sense Multi-Access with Deterministic Collision Resolution) , isto é, os nós atrasam a transmissão se o barramento estiver ocupado, mas, assim que a condição de barramento livre for detectada, qualquer nó pode iniciar a transmissão. As mensagens são caracterizadas por identificadores únicos, que podem ser de 11 ou 29 bits , e que também determinam a prioridade intrínseca da mensagem ao competir com outras pelo acesso ao barramento. Elas possuem comprimento de dados de até 8 bytes de informação útil que podem ser transmitidas a uma taxa de até 1 Mbps utilizando um protocolo de arbitragem e excelente mecanismo de detecção e sinalização de erros que proporcionam a integridade das informações transmitidas. A taxa de transmissão depende do comprimento do barramento. A taxa máxima especificada é de 1 Mbps em sistemas com barramento de comprimento de até 30 m. Para distâncias superiores a taxa de transmissão recomendada diminui. Se a distância do barramento for superior a 1 km pode ser necessária à utilização de dispositivos repetidores ou pontes para reforçar o sinal elétrico. Alguns dos valores recomendados pela CiA ( CAN in Automation ) [14] para taxas de transmissão em função do comprimento do barramento estão indicados na Figura 4.
Figura 4 – Taxas de transmissão recomendadas pela CiA.
O número de elementos num sistema CAN está, teoricamente, limitado pelo número possível de identificadores diferentes. Este número limite é significativamente reduzido por limitações físicas do hardware. Existem no mercado de circuitos integrados transceivers que permitem ligar pelo menos 110 nós. CAN permite flexibilidade uma vez que podem ser adicionados novos nós a rede sem requerer alterações do software ou hardware dos demais nós. Além disso, o custo para implementação de um nó CAN é baixo, o barramento possui apenas dois fios e a rede possui capacidade de funcionar em ambientes com condições elétricas adversas.
3.2 Implementação de um nó CAN
Para implementar um nó CAN, é necessário ter, segundo a CiA, três componentes básicos: um transceiver , um controlador CAN e um microcontrolador. Na Figura 5 está ilustrado um diagrama de blocos de um nó CAN.
Figura 5 - Diagrama de blocos de um nó CAN.
Existe uma flexibilidade quanto à integração desses três componentes. Podemos ter três variações: a) Stand-Alone - O controlador CAN é separado do microcontrolador e do transceiver. b) Integrado - O controlador CAN e o microcontrolador estão integrados em um único chip e separados do transceiver , e; c) Single-Chip – O controlador CAN, o microcontrolador e o transceiver estão integrados em um único chip. Em uma arquitetura Stand-Alone pode-se utilizar processadores diferentes permitindo reutilização do código. A desvantagem em se utilizar esse tipo de arquitetura, é que a taxa de comunicação entre o microcontrolador e o controlador CAN é relativamente baixa, pois se utiliza um barramento externo. Já em uma arquitetura Integrada ou Single-Chip , utiliza-se um barramento de dados e de endereço interno de alta velocidade que reduz consideravelmente a carga sobre o microcontrolador quando comparado a uma arquitetura Stand-Alone.
3.3 Formatos e tipos das mensagens
De acordo com a especificação CAN 2.0B [3], existem dois formatos de mensagens, o formato padrão e o formato estendido. A diferença entre eles é quanto ao número de bits do identificador. No formato padrão o identificador possui 11 bits , e no formato estendido o identificador possui 29 bits. A transmissão e recepção de mensagens são efetuadas e controladas através de quatro tipos diferentes de mensagens: mensagem de dados, mensagem de requisição de dados, mensagem de erro e mensagem de sobrecarga. Os dois primeiros tipos de mensagens são utilizados durante a operação normal da rede CAN: a mensagem de dados é utilizada para transferir dados de um nó para outro, e a mensagem de requisição de dados é usada para requisitar dados de um nó da rede. Os outros tipos de mensagens são usados para sinalizar um estado anormal da rede CAN: a mensagem de erro sinaliza a existência de um estado de erro e uma mensagem de sobrecarga sinaliza que um nó particular não está pronto para receber mensagens. Na Figura 6 são ilustrados os campos de uma mensagem de dados.
Figura 6 – Diagrama com os campos de uma mensagem de dados.
3.4 Meio de transmissão
É possível utilizar diversos meios físicos de transmissão, tais como: par de fios trançados, fibra óptica, rádio freqüência e etc. A maioria das aplicações utiliza um barramento diferencial a dois fios, designados por: CAN L e o CAN H. O seu nível de tensão é dado pela diferença de tensão entre esses dois fios. Na Figura 7 são ilustrados os possíveis níveis de tensão do barramento diferencial.
O sistema implementado é constituído por quatro nós CAN, os quais se comunicam por um barramento do tipo coaxial de 100 metros de comprimento a uma taxa de transmissão de aproximadamente 500 Kbps. Cada nó CAN foi implementado com uma arquitetura diferente em termos de unidade de controle, utilizou-se microconversores em dois dos nós CAN, em um outro nó um processador digital de sinais e no quarto nó da rede uma placa controladora CAN localizada no barramento PCI de um computador pessoal (PC). Na Figura 9 está ilustrado um diagrama de blocos do sistema implementado.
Figura 9 - Diagrama de blocos do sistema de controle distribuído implementado.
4.1 Arquitetura do nó CAN 01
O nó CAN 01 é constituído pela placa controladora PCICAN – D [16], a qual está no barramento PCI de um computador. A placa PCICAN - D possui dois nós CAN formados pelo controlador CAN SJA1000 [17], que implementa as especificações CAN 2.0A e o CAN 2.0B (Ativo), e pelo transceiver 82C251 [18]. Utilizamos apenas um desses dois nós CAN disponíveis na placa. Esse nó está configurado apenas para receber mensagens dos demais nós da rede. Todas as informações recebidas são visualizadas em um aplicativo. Todos os drivers necessários para instalação da placa estão disponíveis na internet [19]. Para o desenvolvimento do software dessa placa, utilizamos à biblioteca CANLIB, que é específica para essa placa e também está disponível em [19].
4.2 Arquitetura dos nós CAN 02 e 03
Os nós CAN 02 e 03 possuem uma arquitetura do tipo stand-alone. Com esse tipo de arquitetura, podem-se integrar facilmente dispositivos com diferentes tecnologias através de suas interfaces. Esses dois nós são constituídos pelo microconversor ADuC812 [20], pelo controlador CAN MCP2510 [21] e pelo transceiver MCP2551 [22]. A comunicação entre o MCP2510 e o ADuC812 é realizada através da interface SPI ( Serial Peripheral Interface ) [20-21-23]. O nó CAN 02 possui um sensor de temperatura (ST), um potenciômetro (P1), um LED (L1) e uma chave (CH1). O nó CAN 03 possui um cooler , um potenciômetro (P2), um LED (L2) e uma chave (CH2). Na Figura 10 está ilustrado um diagrama esquemático da implementação desses nós CAN.
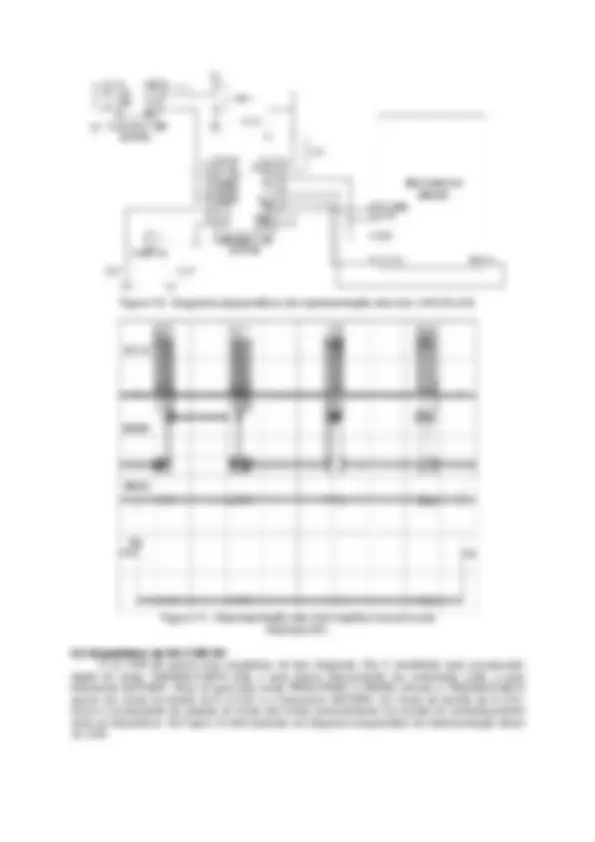
4.2.1 Comunicação entre o controlador CAN e o microconversor
A comunicação entre o controlador CAN e o microconversor é feita pela interface SPI a uma taxa de transmissão de 2,7 Mbps. A SPI é uma interface serial síncrona na qual transfere e recebe dados (8 bits ) no modo full duplex , de um dispositivo mestre para vários dispositivos escravos [23]. A sua interface é composta de quatro linhas físicas: CLK ( clock ), que determina a velocidade e o sincronismo da transferência e recepção de dados. No dispositivo mestre, o pino CLK é sempre uma saída, e no dispositivo escravo é sempre uma entrada; MOSI ( Master Out Slave In ), é o pino no qual os dados são transferidos do mestre para o escravo; MISO ( Master In Slave Out ), é o pino onde os dados são transferidos do escravo para o mestre; e o CS ( Chip Select ), é o pino que habilita a transferência de dados quando o seu nível for baixo. O pino CS no modo mestre é uma saída, e no modo escravo é uma entrada. Neste projeto, o controlador CAN está configurado como escravo e o microconversor como mestre. Na Figura 11 apresenta-se os sinais nos pinos da interface SPI em uma transferência de dados entre o dispositivo mestre (ADuC812) e o dispositivo escravo (MCP2510).
Figura 10 - Diagrama esquemático da implementação dos nós CAN 02 e 03.
Figura 11 – Representação das informações nos pinos da Interface SPI.
4.3 Arquitetura do Nó CAN 04
O nó CAN 04 possui uma arquitetura do tipo integrada. Ele é constituído pelo processador digital de sinais TMS320LF2407A [24], o qual possui internamente um controlador CAN, e pelo transceiver MCP2551. Esse nó gera dois sinais PWM (PWM1 e PWM2). Devido o TMS320LF2407A operar em níveis de tensão de 0 à 3,3V e o transceiver MCP2551 em níveis de tensão de 0 à 5V, houve a necessidade de adaptar os níveis dos sinais acrescentando um circuito de condicionamento entre os dispositivos. Na Figura 12 está ilustrado um diagrama esquemático da implementação desse nó CAN.
Figura 13 - Diagrama com as possíveis rotas de transmissões e recepções de mensagens CAN.
5 RESULTADOS OBTIDOS
As informações dos subsistemas de controle de temperatura, de iluminação e de controle do ciclo de trabalho de dois sinais PWM são transmitidas para o nó CAN 01 através do barramento CAN e visualizadas com o auxílio de um aplicativo. Nas Figuras 14 e 15 apresentam-se telas do aplicativo com as informações do sistema.
Figura 14 - Representação da tela do aplicativo com as informações do sistema.
Figura 15 – Representação da tela do aplicativo com as informações do sistema.
Os dois sinais PWM gerados no nó CAN 04 com ciclos de trabalho controlados pelos potenciômetros P1 (Nó CAN 02) e P2 (Nó CAN 03) foram visualizados com o auxílio de um osciloscópio. Na Figura 16 apresenta-se a tela do osciloscópio com os sinais PWM1 e PWM2 com diferentes ciclos de trabalho.
Figura 16 - Representação das informações dos sinais PWM 1 e 2.
6 CONCLUSÕES
DADOS DOS AUTORES
Jadsonlee da Silva Sá Departamento de Engenharia Elétrica - DEE, Universidade Federal de Campina Grande – UFCG. Avenida Aprígio Veloso, 882, Campina Grande, Paraíba – PB. CEP.: 58.109 - 970 Telefone: (83) 3310 – 1150 Fax: (83) 3310 - 1015 Email: [email protected]
Péricles Rezende Barros Departamento de Engenharia Elétrica - DEE, Universidade Federal de Campina Grande – UFCG. Avenida Aprígio Veloso, 882, Campina Grande, Paraíba – PB. CEP.: 58.109 - 970 Telefone: (83) 3310 – 1147 Fax: (83) 3310 - 1015 Email: [email protected]
José Sérgio da Rocha Neto Departamento de Engenharia Elétrica - DEE, Universidade Federal de Campina Grande – UFCG. Avenida Aprígio Veloso, 882, Campina Grande, Paraíba – PB. CEP.: 58.109 - 970 Telefone: (83) 3310 – 1150 Fax: (83) 3310 - 1015 Email: [email protected]