Pré-visualização parcial do texto
Baixe prova de robotica e outras Provas em PDF para Mecatrônica, somente na Docsity!
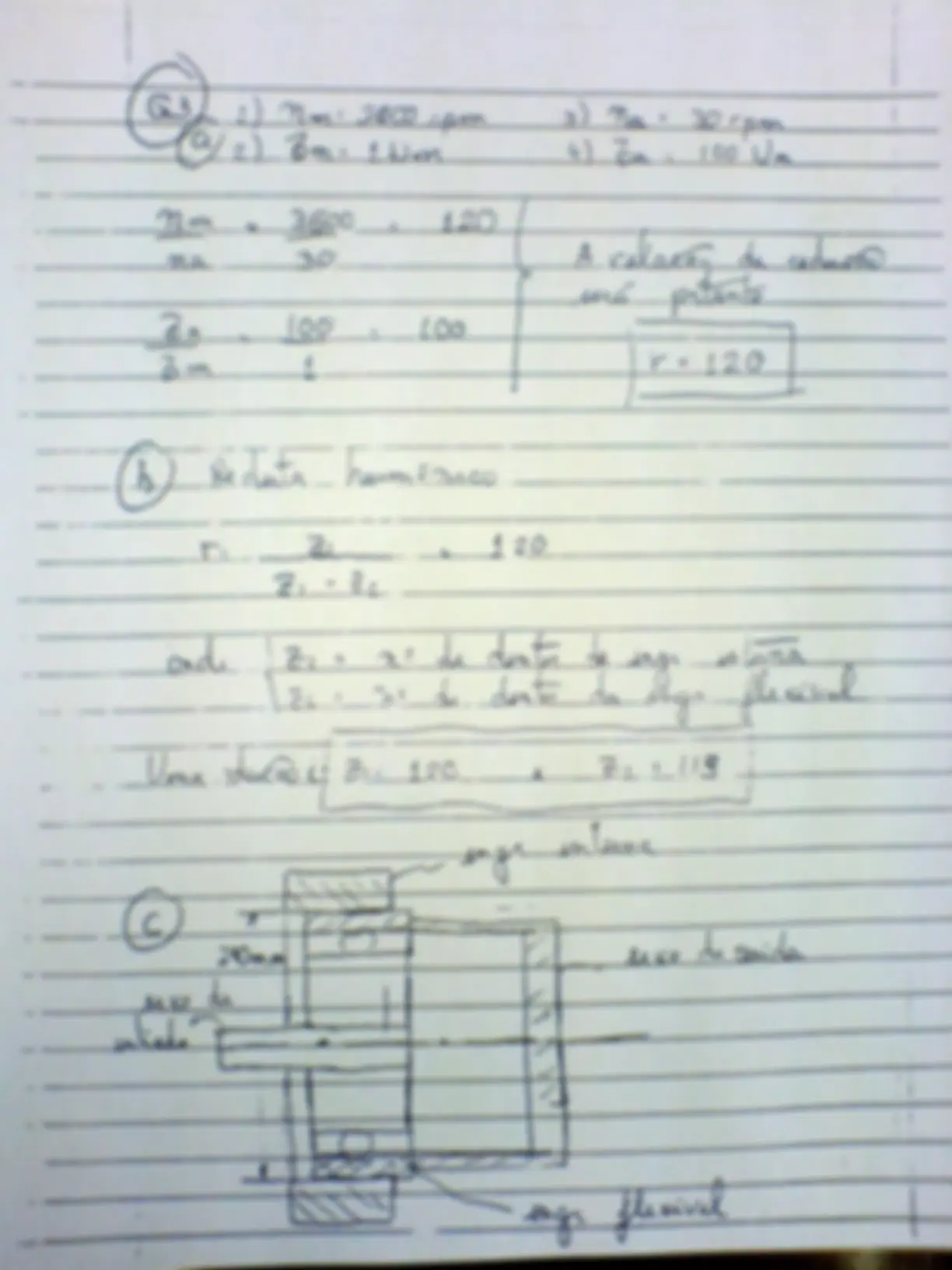
CABRAL PMC-591: Elementos de Robótica - 1º Prova Prof. Eduardo Lobo Lustosa Cabral Do 1º Semestre, 2001 Nome: E SO A U AR ar Õ rt 1º Questão: (2,5 pontos) Tem-se um arranjo composto de um robô. um sistema de transporte por esteira e um sistema de visão computacional. A partir do processamento da imagem da câmera obtém-se a posição de objetos na esteira para que o robô os pegue e coloque em uma máquina CNC para posterior usinagem. Porém, antes de se utilizar a câmera para este fim, ela deve ser calibrada, ou seja, deve-se conhecer como a posição de um ponto no sistema de coordenadas da câmera (sistema O,-x,y/Z)) se relaciona com a posição deste mesmo ponto no sistema fixo na base do robô (sistema Oo-xayozo). Para esta calibração ser efetuada tem-se os seguintes dados: (1) a câmera está posicionada à uma altura desconhecida açi da mesa. (2) O eixo z; da câmera é paralelo ao eixo zo; (3) o centro da câmera (ponto O) está posicionado ito-vo, (4) um objeto de calibração com centro no ponto 7, está em cima da esteira na posição (-0.7m, 0.8m, 0.Im] em relação ao sistema fixo Og-xayozo e à câmera vê este objeto na posição [-0.4m, 0.6m, 2m]). Assim, pede-se: (a) Calcular a posição e orientação da câmera em relação ao sistema fixo Oo-xayozo. (b) Descreva a orientação da câmera em termos de parâmetros de Euler-Rodngues. 2º Questão: (5,5 pontos) Dado o esquema do robô de 5 graus de liberdade da figura ao lado pede-se: (a) Usando a metodologia de Denavit-Hartenberg estabeleça os sistemas de coordenadas e faça uma tabela com os parâmetros de Denavit-Hartenberg. (b) Momte as matrizes homogêneas Á/ (q,) e mostre, com detalhes. como obter a posição e a orientação do efetuador em relação ao sistema de coordenadas da base (não precisa obter as expressões). (c) Obtenha a matriz de rotação do efetuador em função das posições das articulações, em relação ao sistema de coordenadas da base. (d) Obtenha a expressão da velocidade angular do efetuador. descrita em função do sistema de coordenadas da base, em função das posições e velocidades das articulações. (e) Obtenha a velocidade linear do ponto P em função das posições e velocidades das articulações. (f) Sabendo-se que os movimentos máximos das 3 primeiras articulações são respectivamente 270º, Im e 0,8m, desenhe esquematicamente o volume de trabalho deste robô (use uma vista superior e uma vista lateral). Questão 3: (2 pontos) Você foi solicitado a calcular um redutor tipo harmônico para uma movimentar a aruculação de um robô manipulador. São dados: (1) velocidade máxima de rotação do eixo motor, 3600rpm: (2) torque do motor na rotação de 3600rpm. INm: (3) rotação máxima do eixo da articulação, 30rpm; (3) torque máximo na articulação, 100Nm. Pede-se: (a) Quai a relação de transmissão necessária para o redutor? (b) Calcule o mimero de dentes das engrenagens do redutor, sabendo-se que o módulo dos dentes deve ser de sã RR) Faça um desenho esquemático do redutor, mostrando os eixos de entrada e de saida. e os diâmetros das peças. “o E E = DE RE E ea Co ço q “e > no ——— mi um ———— — mi - “Qlcal o rá G | a - S no u E Edo) E 3 pel 4 Era Q E S e o a AE SE =—eI< E pe 5 | À h E o O E a Ko — o (3) SAN Age. Cs. “68 0 ; mes O O Õ Õ a À ta ls Rs , Í : Ro | Es EO cp 1 Ro E ie | (aa Ra ceia Tum EO . E agr vd o - BOCA. (8) À edad A dal As (84) / Ag (es) a ma DO e RO - ne, EE alto és 670) L0o Reage Se gm é ae r= 120