



Disciplina: Redes
Industriais e Sistemas
Supervisórios
Aula 02
Professora Renata Mercante






Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Artigo sobre Redes e supervisorio
Tipologia: Slides
1 / 24

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Redes Industriais A estrutura da automação industrial baseia-se em ilhas de informações e caracterizam-se por sistemas onde o hardware e o software utilizados são proprietários. Esse tipo de solução causa enormes prejuízos às empresas. A criação dos chamados "gargalos de informações" também é uma das complicações geradas por essa estrutura. Uma tendência nos sistemas atuais é a integração destas ilhas de informação. Nesse sentido visa-se utiliza Ethernet e um protocolo padrão como o TCP/IP.
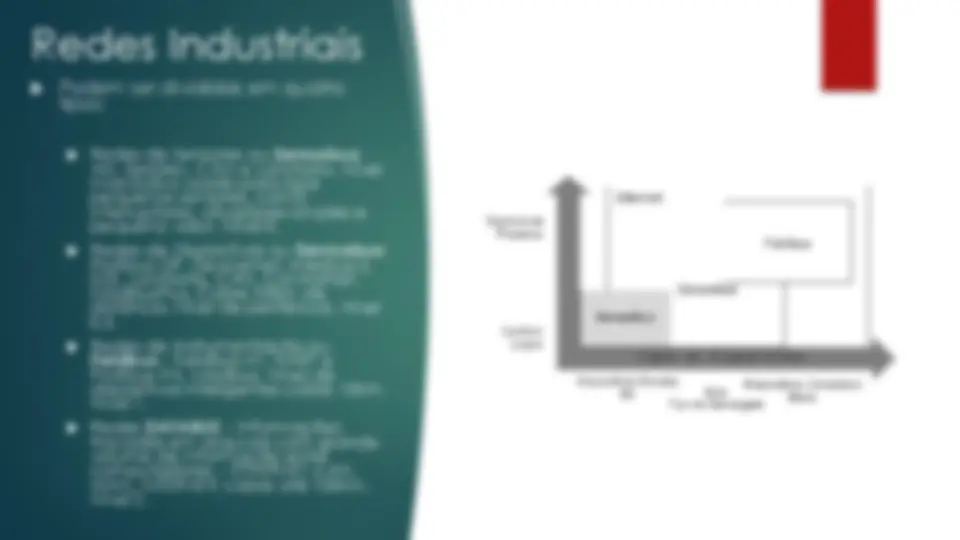
Redes Industriais Podem ser divididas em quatro tipos: Redes de Sensores ou Sensorbus : ASI, Seriplex, CAN e LonWorks. Nível mais baixo usada para ligar pequenos sensores, como interruptores, atuadores simples e pequeno valor. Nível 0. Redes de Dispositivos ou Devicebus : Profibus-DP, DeviceNet, Interbus-S, SDS, LonWorks, CAN, ControlNet, ModbusPlus. Cobre 500m de distância. Nível de periféricos. Nível 0,5. Redes de Instrumentação ou Fieldbus - Fieldbus-H1, HART e Profibus-PA, Modbus. Nível de dispositivos inteligentes cobre 10km. Nivel 1. Redes DATABUS – Informações trocadas em arquivos com grande volume de informação entre computadores – ETHERNET (LAN, WAN, INTERNET) cobre até 100km. Nível 2.
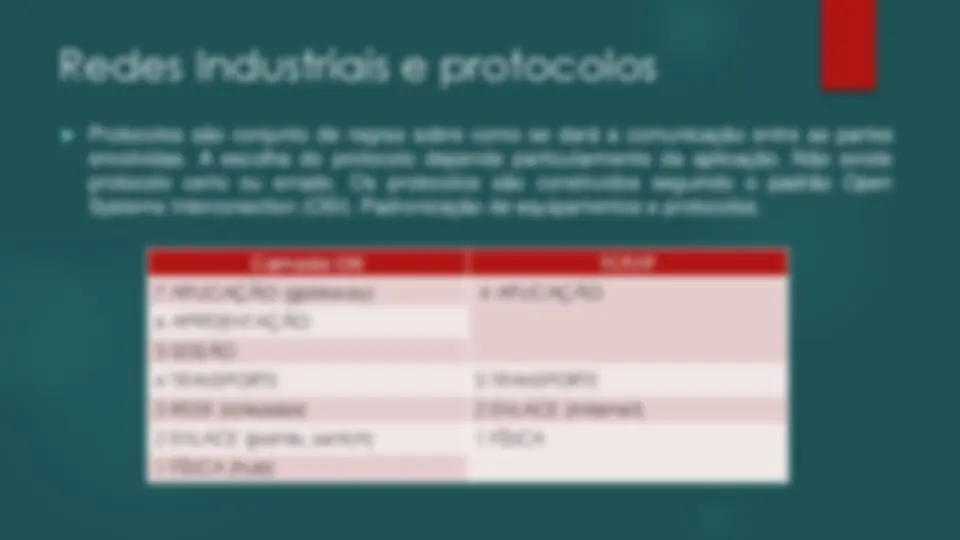
Redes Industriais e protocolos Protocolos são conjunto de regras sobre como se dará a comunicação entre as partes envolvidas. A escolha do protocolo depende particularmente da aplicação. Não existe protocolo certo ou errado. Os protocolos são construídos seguindo o padrão Open Systems Interconection (OSI). Padronização de equipamentos e protocolos. Camada OSI TCP/IP 7 APLICAÇÃO (gateway) 4 APLICAÇÃO 6 APRESENTAÇÃO 5 SESSÃO 4 TRANSPORTE 3 TRANSPORTE 3 REDE (roteador) 2 ENLACE (Internet) 2 ENLACE (ponte, switch) 1 FÍSICA 1 FÍSICA (hub)
Redes Industriais (Protocolos)
Actuator Sensor Interface (AS-I) Protocolo aberto para simples aplicações Mestre escravo. Cada nó deve ter o ASI SLAVE. Tempo de varredura de 5ms. Comunicação por “telegramas” (4 bits de informação). Endereços definidos pelo mestre ou por programação. Topologia Estrela, árvore ou anel. Máximo de 100 metros do dispositivo ao mestre (500m com repetidores)
Actuator Sensor Interface (AS-I) Redes de sensores trabalham detectando e convertendo a “1” ou “0” as leituras de sequências de 16 bits (words). O “Scanner” é responsável por transformar as “words” de estado de cada nó da rede de sensores em um registro no dispositivo final (CLP).
Actuator Sensor Interface (AS-I) Os módulos escravos estão disponíveis em quatro configurações: Módulos de entrada para sensores convencionais ou fins de curso com contatos mecânicos Módulos de saída para atuadores convencionais Módulos de entrada e saída para aplicações duais. Módulos de conexão para ligação de sensores compatíveis com AS-I. Conversores analógicos-digitais. A cada escravo é permitido drenar uma corrente de 65mA da fonte de 30VDC. Se os dispositivos necessitam de mais corrente, fontes separadas devem ser conectadas a cada dispositivo.
Aspecto Físico do módulo ASI O formato do cabo impede a montagem com polaridade trocada O material isolante é projetado para recuperar a isolação após a sua perfuração pelos módulos escravos. Normalmente informação e energia são transmitidos no mesmo cabo de cor amarela. Para circuitos com acionamento em condições de segurança, ou quando os escravos precisam de mais potência, pode-se usar uma fonte de tensão auxiliar com um cabo separado.
Características das redes AS-I Cabeamento simples e de baixo custo. Dados e energia em um único cabo Conectividade com outras redes como PROFIBUS, DEVICENET e MODBUS Conceito mais econômico para a montagem de uma rede se há um grande número de sinais binários a serem detectados e transmitidos. Algumas ideias que reforçam o uso do AS-I: Dispositivos não tem como serem ligados erradamente. Não é preciso verificação. Ampliações podem ser feitas simplesmente adicionando escravos no cabo da rede AS-I e atualizando o programa de controle. A instalação é simples, não necessitando de mão de obra especializada
Configuração das redes AS-I Versão 2.
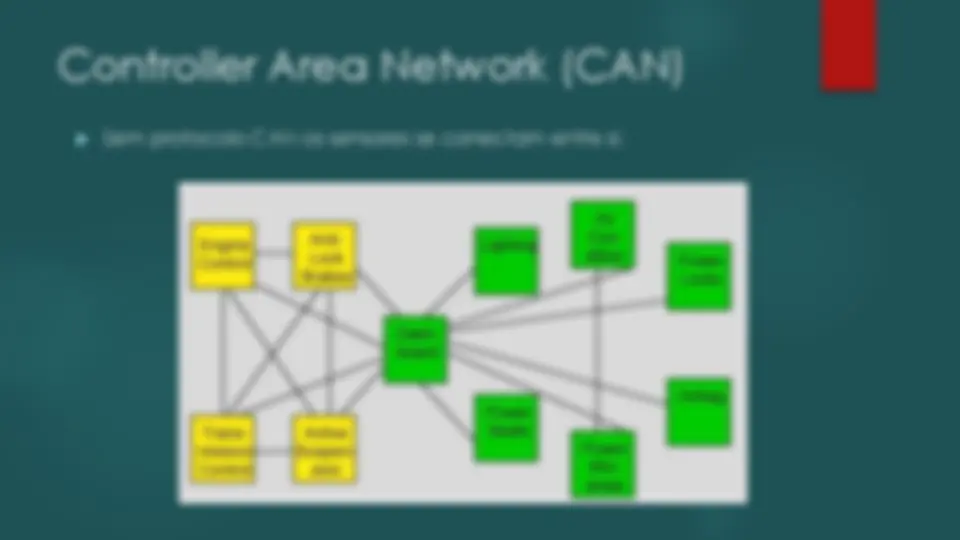
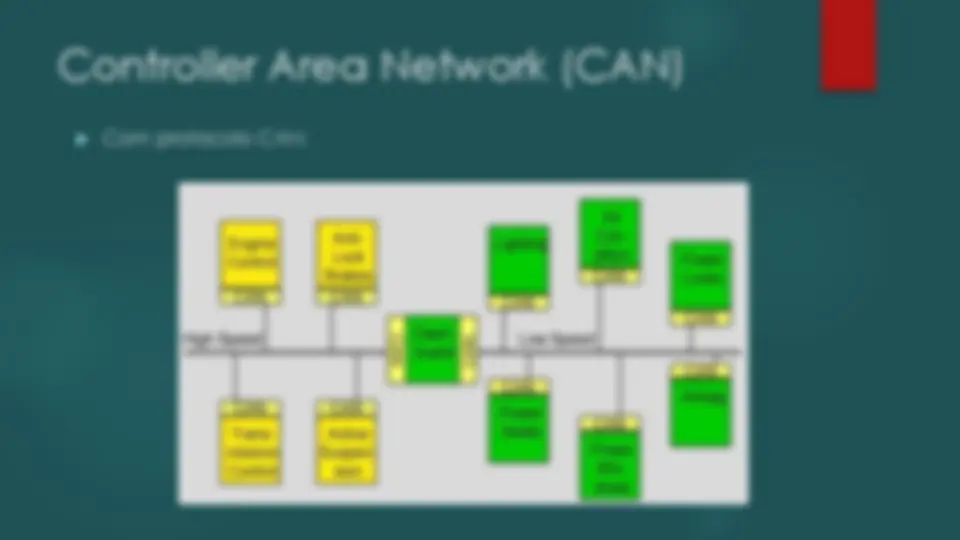
Controller Area Network (CAN) A rede CAN é um sistema de comunicação serial concebida inicialmente para aplicações de sistemas automotivos. Sua utilização na indústria automotiva foi motivada pelos benefícios técnicos e econômicos, o que culminou com padronização pela SAE ( Society of Automotive Engineers ) e pela ISO ( International Organization for Standardization ). Com o sucesso obtido nas aplicações automotivas a comunidade da indústria de processo adotou em determinadas aplicações industriais.
Controller Area Network (CAN) Acesso à rede baseado em conceito Multimestre todos os módulos podem transmitir uma mensagem assim que o barramento estiver livre No momento da transmissão simultânea de vários módulos, o que tiver a mais alta prioridade recebe o direito de acesso à rede Transmissão pode ser Multicast para todos os módulos ao mesmo tempo. Filosofia de acesso ao meio CSMA/BA (Carrier Sense Multiple Access with Bit Wise Arbitration) na qual é feita uma análise da prioridade de transmissão. Aquele que tiver prioridade maior continuará enviando a sua mensagem sem destruição Taxa de transmissão programável entre 5Kbps a 1Mbps Protocolo Digital e Comunicação Serial Síncrono Detecção de erros Retransmissão Automática de Mensagens Corrompidas
Controller Area Network (CAN): métodos de transmissão CSMA/CD (Carrier Sense Multiple Access/Collision Detection): No método chamado de CSMA (Carrier Sense Multiple Access), quando um dispositivo deseja transmitir ele “ouve” o meio para saber se existe outra transmissão. Caso não haja, o dispositivo pode transmitir. Caso contrário, ela espera por um tempo aleatório e tenta transmitir novamente. Utilizado nas redes locais de computadores (Ethernet). CSMA/BA (Carrier Sense Multiple Access/Bit Wise Arbitration) : É semelhante ao CSMA/CD utilizado na Ethernet, com a diferença que, em uma eventual colisão, temos prioridades de tempo e mensagens definidas. Utilizado nas redes CAN. CSMA/CA (Carrier Sense Multiple Access/Collision Avoidance) : O controle de acesso ao meio por CSMA/CA é um método de transmissão que possui um grau de ordenação maior que CSMA/CD e mais parâmetros restritivos. Antes de transmitir efetivamente um pacote, a estação avisa sobre a transmissão e em quanto tempo irá realizar a tarefa. Utilizado em redes sem fio WiFi. Menor probabilidade de colisão.