¡Descarga Apuntes sobre el método Simplex y más Apuntes en PDF de Administración de Empresas solo en Docsity!
ANEXO A TEMA 1:
PROGRAMACIÓN LINEAL
1.Introducción.
2.Solución de problemas lineales a través
del método gráfico.
3.El método del SIMPLEX.
4.El análisis de sensibilidad.
5.La dualidad y su interpretación económica.
5.1. Introducción
- ¿Qué productos fabricar?
- Recursos limitados (mano de obra,
energía, materia prima A, B…
- Maximizar el beneficio
- Las relaciones entre la producción y
el consumo de recursos son lineales
- La relaciones entre la producción y el
beneficio son lineales
5.2. Solución de problemas lineales a
través del método gráfico
- Métodos de resolución:
- Método gráfico:
- Más sencillo e intuitivo
- Problemas “pequeños”: 2 o tres variables
(productos)
- Método del SIMPLEX:
- Más complejo y menos intuitivo
- Problemas de cualquier tamaño
5.2. Solución de problemas lineales a
través del método gráfico
EJEMPLO:
Una empresa fabrica dos modelos de retrovisor
(modelo 1 y modelo 2). El beneficio unitario es,
respectivamente de 60 y 50 € por retrovisor. Para
fabricar una unidad del modelo 1 se precisan 8
componentes de plástico y 10 metálicos; para una
unidad del modelo 2, 5 u. de plástico y 3 metálicas. Si
diariamente podemos fabricar 800 u. de plástico y 600
u. metálicas ¿cuántos retrovisores de cada modelo
conviene fabricar para maximizar el beneficio?
Max Z= 60x
1
+ 50x
2
8x
1
+ 5x
2
x
1
≥ 0 x
2
10x
1
+ 3x
2
SOLUCIÓN
x
1
x
2
Z= 600 + 50160 = 8.
Consumo ≤ disponible
Se agotan los
componentes
plásticos
Sobran componentes
metálicos: sobran
600 – 480 = 120 u.
5.3 El método del SIMPLEX
En las restricciones convertir los ≤ en
= incorporando “variables de holgura”
x
j
≥ 0 j= 1, 2, 3 … n, n+1, n+2…. n+m
Max Z= c
1
x
1
+ c
2
x
2
+ …….. + c
n
x
n
a
11
x
1
+ a
12
x
2
+ ….. + a
1n
x
n
a
21
x
1
+ a
22
x
2
+ ….. + a
2n
x
n
a
m
x
1
+ a
m
x
2
+ ….. + a
mn
x
n
b
m
+ x
n+m
+ x
n+
b
1
b
2
+ x
n+
+ 0x
n+
+ … +0x
n+m
1. Buscar una SOLUCIÓN INICIAL básica y factible
- BÁSICA: tantas variables como restricciones
- FACTIBLE: que cumpla las restricciones
- variables de holgura: x
n+
, x
n+
…. X
n+m
- el resto de variables valen 0: x
1
= x
2
= ….. = x
n
a
11
x
1
+ a
12
x
2
+ ….. + a
1n
x
n
a
21
x
1
+ a
22
x
2
+ ….. + a
2n
x
n
a
m
x
1
+ a
m
x
2
+ ….. + a
mn
x
n
b
m
+ x
n+m
+ x
n+
b
1
b
2
+ x
n+
Despejando: x
n+
= b
1
, x
n+
=b
2
…. X
n+m
=b
m
Método del SIMPLEX
Método del SIMPLEX
1. Buscar una SOLUCIÓN INICIAL básica y factible
- BÁSICA: tantas variables como restricciones
- FACTIBLE: que cumpla las restricciones
- variables de holgura: x
n+
, x
n+
…. X
n+m
- el resto de variables valen 0: x
1
= x
2
= ….. = x
n
Despejando: x
n+
= b
1
, x
n+
=b
2
…. X
n+m
=b
m
2. MEJORAR LA SOLUCIÓN: Se aplica un algoritmo
reiterativo para ir de un punto extremo a otro, con mayor
beneficio que el anterior
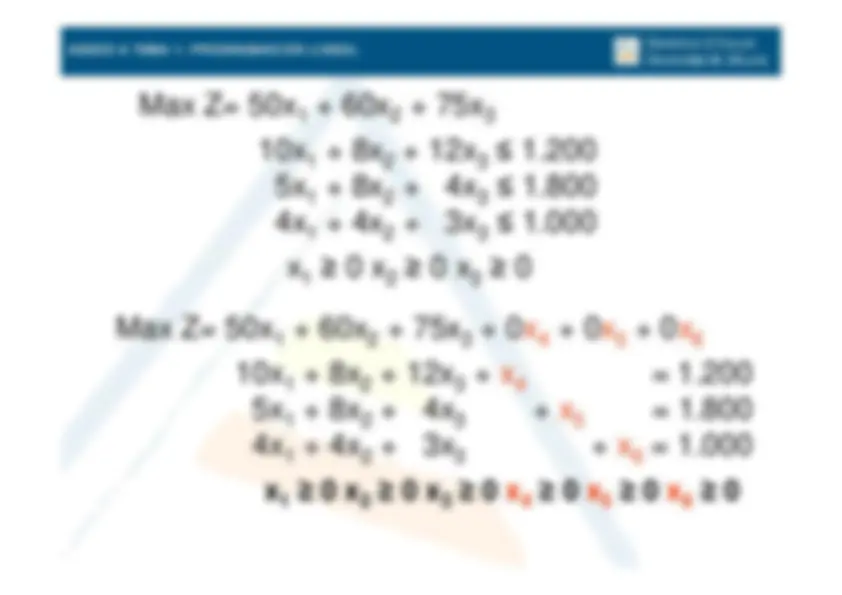
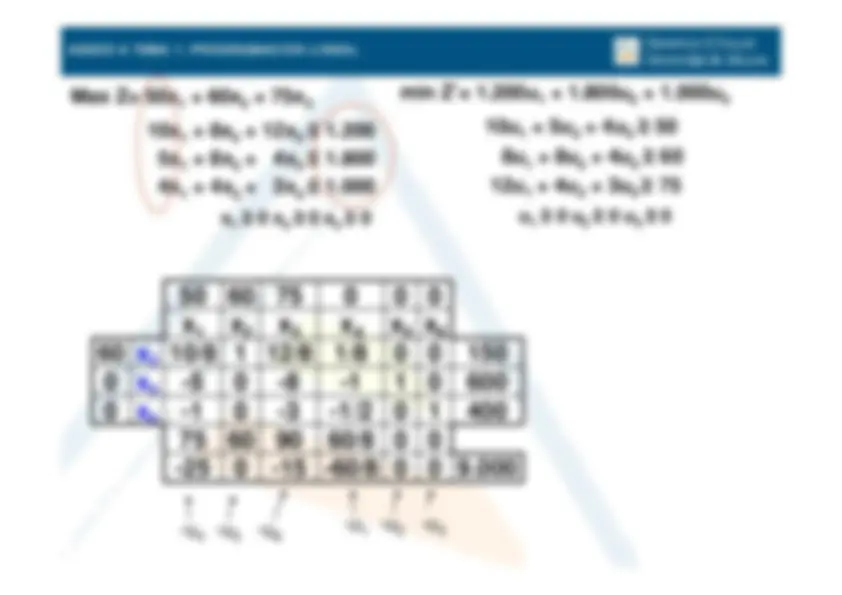
Max Z= 50x
1
+ 60x
2
+ 75x
3
10x
1
+ 8x
2
+ 12x
3
x
1
≥ 0 x
2
≥ 0 x
3
5x
1
+ 8x
2
+ 4x
3
4x
1
+ 4x
2
+ 3x
3
Max Z= 50x
1
+ 60x
2
+ 75x
3
+ 0x
4
+ 0x
5
+ 0x
6
10x
1
+ 8x
2
+ 12x
3
+ x
4
x
1
≥ 0 x
2
≥ 0 x
3
≥ 0 x
4
≥ 0 x
5
≥ 0 x
6
5x
1
+ 8x
2
+ 4x
3
+ x
5
4x
1
+ 4x
2
+ 3x
3
+ x
6
Max Z= 50x
1
+ 60x
2
+ 75x
3
+ 0x
4
+ 0x
5
+ 0x
6
10x
1
+ 8x
2
+ 12x
3
+ x
4
x
1
≥ 0 x
2
≥ 0 x
3
≥ 0 x
4
≥ 0 x
5
≥ 0 x
6
5x
1
+ 8x
2
+ 4x
3
+ x
5
4x
1
+ 4x
2
+ 3x
3
+ x
6
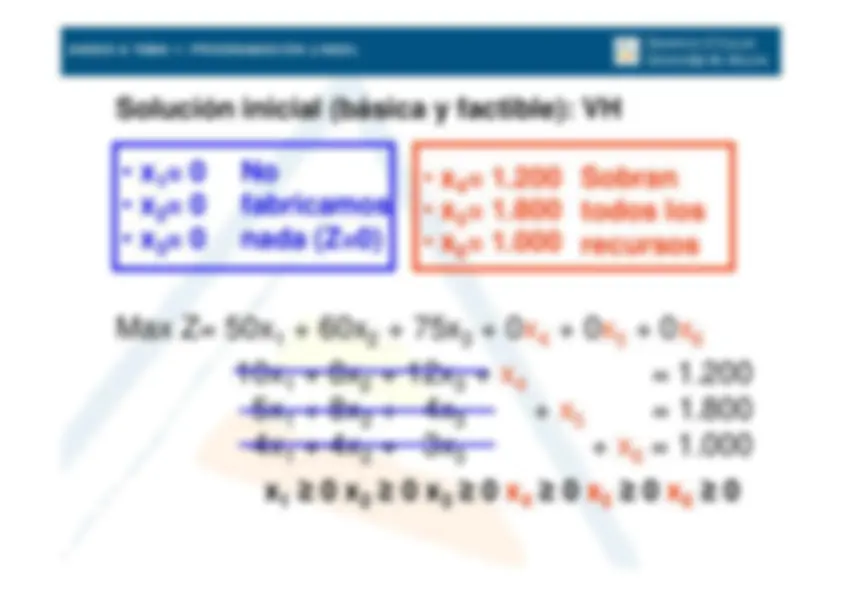
Solución inicial (básica y factible): VH
1
2
3
5
6
No
fabricamos
nada (Z=0)
Sobran
todos los
recursos
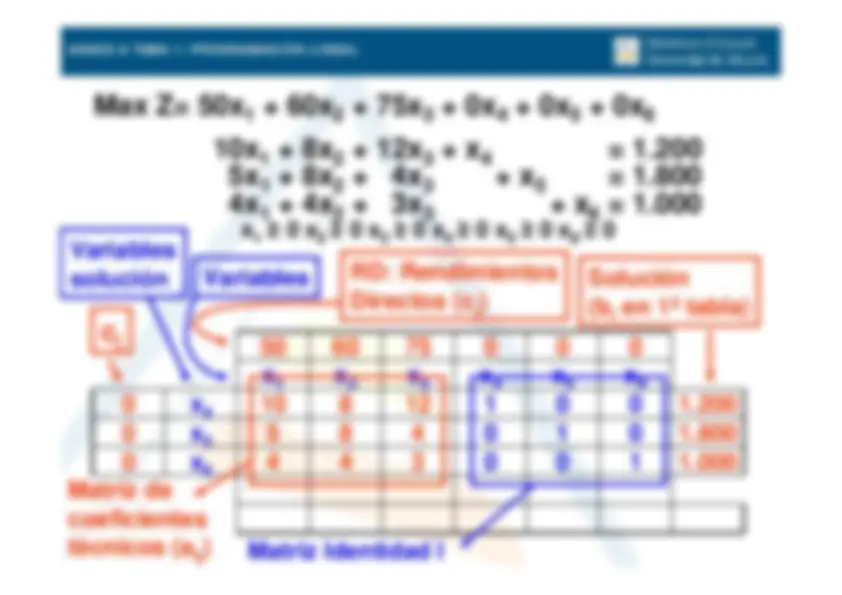
50 60 75 0 0 0
x 1
x 2
x 3
x 4
x 5
x 6
0 x 4
10 8 12 1 0 0 1.
0 x 5
5 8 4 0 1 0 1.
0 x 6
4 4 3 0 0 1 1.
0 0 0 0 0 0
50 60 75 0 0 0 Z=
Variables
RD: Rendimientos
Directos (c j
)
Variables
solución
c
j
Solución
(b i
en 1ª tabla)
Matriz de
coeficientes
técnicos (a
ij
) Matriz Identidad I
Penúltima fila: Rendimientos Indirectos (RI)
ÚLTIMA FILA: Ingresos Marginales: Img = RD – RI
Fila de Indicación. Si Img ≤ 0 → ÓPTIMO
Beneficio
50 60 75 0 0 0
x 1
x 2
x 3
x 4
x 5
x 6
0 x 4
10 8 12 1 0 0 1.
0 x 5
5 8 4 0 1 0 1.
0 x 6
4 4 3 0 0 1 1.
0 0 0 0 0 0
50 60 75 0 0 0 Z=
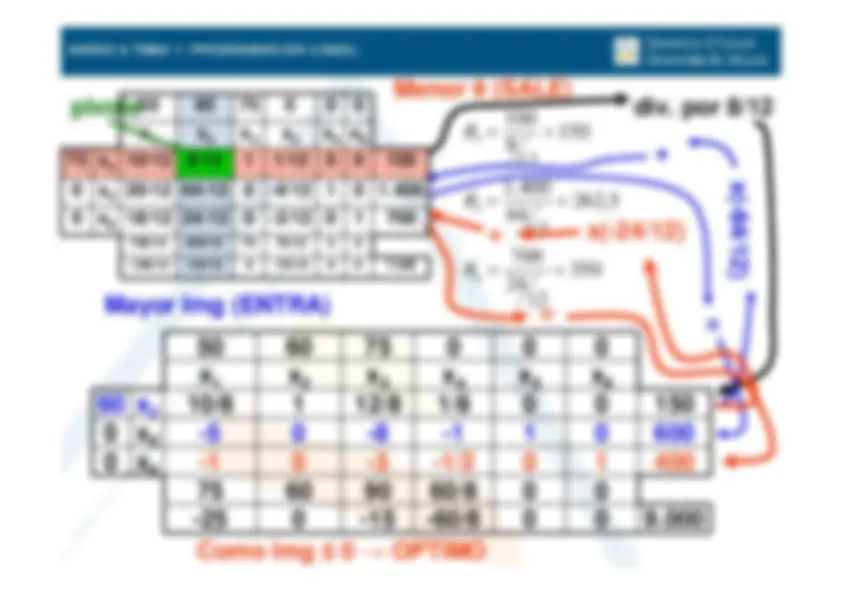
50 60 75 0 0 0
x 1
x 2
x 3
x 4
x 5
x 6
75 x 3
10/12 8/12 1 1/12 0 0 100
0 x 5
20/12 64/12 0 - 4/12 1 0 1.
0 x 6
18/12 24/12 0 - 3/12 0 1 700
750/12 600/12 75 75/12 0 0
- 150/12 120/12 0 - 75/12 0 0 7.
Mayor Img (ENTRA)
6
5
4
Menor θ (SALE)
div. por 12
x(-4)
=
x(-3)
=
pivote
50 60 75 0 0 0
x 1
x 2
x 3
x 4
x 5
x 6
60 x 2
10/8 1 12/8 1/8 0 0 150
0 x 5
0 x 6
75 60 90 60/8 0 0
Como Img ≤ 0 → OPTIMO
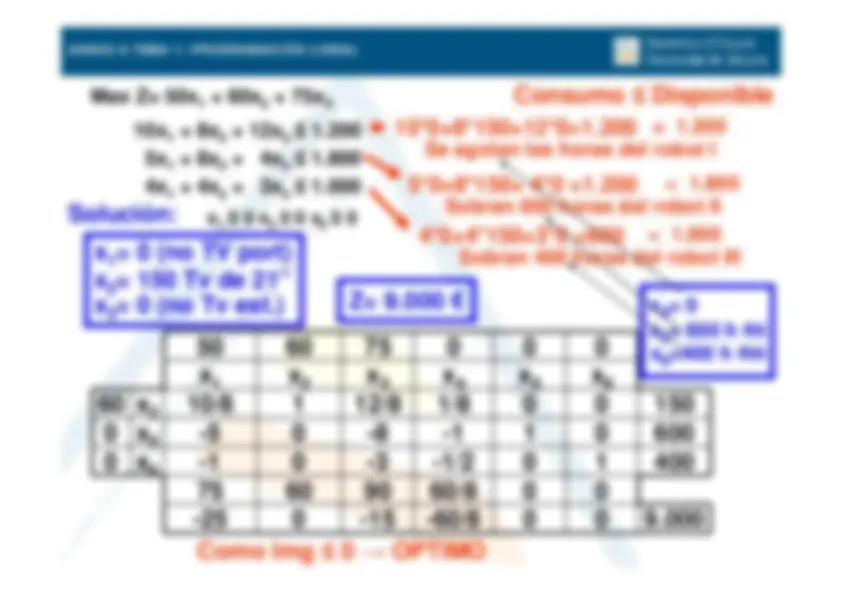
Max Z= 50x 1
10x 1
≤ 1.
x 1
≥ 0 x 2
≥ 0 x 3
≥ 0
5x 1
≤ 1.
4x 1
≤ 1.
Solución:
x 1
= 0 (no TV port)
x 2
= 150 Tv de 21”
Z= 9.000 € x 3
= 0 (no Tv est.)
100+8150+12*0=1.
Consumo ≤ Disponible
= 1.
Se agotan las horas del robot I
50+8150+ 4*0 =1. < 1.
Sobran 600 horas del robot II
40+4150+3*0 =6 00 < 1.
Sobran 400 horas del robot III
x 4
= 0
x 5
= 600 h RII
x 6
=400 h RIII
5.4. Análisis de sensibilidad
¿La solución obtenida sigue siendo válida
cuando se producen modificaciones en los
beneficios unitarios de los productos (c
j
) y
en los recursos disponibles (b
i
Intervalo de
variación para cada
c
j
y para cada b
i