¡Descarga Econometria III tema 5 y más Apuntes en PDF de Econometría solo en Docsity!
Econometria III
LliÁÛ 5. EspeciÖcaciÛ din‡mica mitjanÁant relacions de cointegraciÛ i el mecanisme de correcciÛ dels errors II: ModelitzaciÛ de relacions de llarg termini
Josep LluÌs Carrion-i-Silvestre
Universitat de Barcelona
Novembre 2013
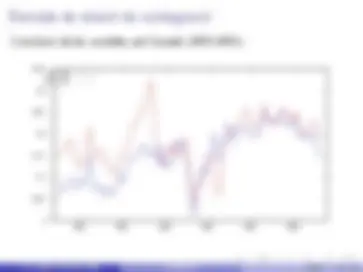
RegressiÛ entre processos no estacionaris
La Teoria EconÚmica (models teÚrics) estableix la nociÛ de
RelaciÛ díequilibri , RelaciÛ díestabilitat
El concepte díequilibri (a llarg termini) implica: (^1) La divergËncia respecte de líestat estacionari ha díestar aÖtada estoc‡sticament. (^2) Ha díexistir una tendËncia cap a retornar a la situaciÛ díequilibri.
Aquestes caracterÌstiques tenen a veure amb el concepte díEstacionarietat en vari‡ncia
CointegraciÛ
LíexcepciÛ al compliment díaquesta propietat de domin‡ncia es produeix quan hi ha una cancel�laciÛ de les tendËncies estoc‡stiques. En termes formals, quan d = 1
xt � I ( 1 )! TendËncia estoc‡stica yt � I ( 1 )! TendËncia estoc‡stica
si es deÖneix zt = yt � α xt ,
i es conclou que zt � I ( 0 ) ,
llavors Ès que síhan cancel�lat les tendËncies estoc‡stiques que presentaven xt i yt.
xt i yt tenien una tendËncia estoc‡stica comuna
CointegraciÛ
DeÖniciÛ de cointegraciÛ (Granger, 1981): Les components díun vector Yt de dimensiÛ (m � 1 ) es diu que estan cointegrades díordres d i b, notat com a Yt � CI (d, b), si: (^1) Totes les components del vector Yt sÛn variables integrades del mateix ordre, Ès a dir, Yt � I (d ) ; (^2) Existeix un vector (vector de cointegraciÛ) de par‡metres α ( 6 = 0 ), tal que α^0 Yt = zt � I (d � b) ; b > 0.
Cancel.laciÛ de components estoc‡stiques
Suposem que els processos estoc‡stics xt i yt es poden descomposar com:
xt = wt + ε t yt = α wt + vt ε t , vt � I ( 0 ) ; wt � I ( 1 ) ,
llavors yt � α xt = vt � α ε t = zt � I ( 0 ) ,
pel que el vector de cointegraciÛ seria β = ( 1 , � α )^0 ja que
β^0 Yt = ( 1 , � α )
yt xt
= vt � α ε t � I ( 0 ).
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
Suposem que es disposa de m variables recollides en el vector Yt :
A (L) ∆Yt = �Π Yt � 1 + ε t
Ès líespeciÖcaciÛ díun model MCE, on Yt vector de dimensiÛ (m � 1 ) A (L) matriu de dimensiÛ (m � m) que compleix (^1) jA (L)j amb totes les arrels fora del cercle de radi unitat (^2) A ( 0 ) = Im (^3) A ( 1 ) amb tots els elements Önits
ε t vector de dimensiÛ (m � 1 ) de termes de pertorbaciÛ Π 6 = 0
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
Teorema de representaciÛ de Granger Si Yt Ès un vector cointegrat CI (^) ( 1 , (^1) ), llavors existeix un MCE per representar el PGD. Si el PGD díun conjunt de variables admet una representaciÛ en termes de MCE, llavors aquestes variables estan cointegrades.
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
Exemple: Suposem Yt = (yt , xt )^0 amb d = b = 1. Com Yt � CI ( 1 , 1 ) ) Existeix un MCE que representi el PGD. Veiem quina forma tÈ aquest model pel cas particular:
A (L) ∆Yt = �Π Yt � 1 + ε t ,
desplegant el model
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
Alternativament,
∆yt = φ 1 (L) ∆yt � 1 + Ω 1 (L) ∆xt � 1 � γ 1 (yt � 1 � α xt � 1 ) + ε 1 ,t ∆xt = φ 2 (L) ∆xt � 1 + Ω 2 (L) ∆yt � 1 � γ 2 (yt � 1 � α xt � 1 ) + ε 2 ,t ,
amb
φ 1 (L) =
φ 1 , 1 L +... + φ 1 ,p 1 Lp^1
Ω 1 (L) = (w 1 , 1 L +... + w 1 ,p 2 Lp^2 )
φ 2 (L) =
φ 2 , 1 L +... + φ 2 ,p 4 Lp^4
Ω 2 (L) = (w 2 , 1 L +... + w 2 ,p 3 Lp^3 ).
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
La representaciÛ del MCE escollida presenta les caracterÌstiques seg¸ents:
Incorpora la restricciÛ que el vector de cointegraciÛ Ès el mateix en ambdues equacions.
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
La representaciÛ del MCE escollida presenta les caracterÌstiques seg¸ents:
Incorpora la restricciÛ que el vector de cointegraciÛ Ès el mateix en ambdues equacions. Els polinomis autoregressius 8 jLi j > 1. 9 γ i , i = (^) f 1 ,... , mg, tal que γ i 6 = 0. Aquest par‡metre rep el nom de par‡metre de correcciÛ dels error o velocitat de líajust.
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
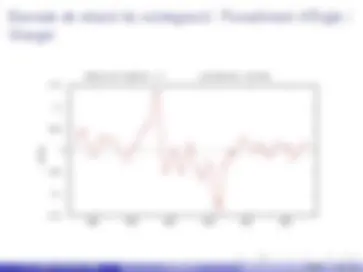
Si Yt � I ( 1 ), tots els elements del model sÛn I ( 0 ) si existeix cointegraciÛ; si no existeix cointegraciÛ! γ i = 0. …s la condiciÛ díequilibri del model.
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
Si Yt � I ( 1 ), tots els elements del model sÛn I ( 0 ) si existeix cointegraciÛ; si no existeix cointegraciÛ! γ i = 0. …s la condiciÛ díequilibri del model. Si (yt � 1 � α xt � 1 ) < 0! Signe + que far‡ que ∆yt incrementi i es tendeixi cap a retornar a líequilibri en els perÌodes seg¸ents. (yt � 1 � α xt � 1 ) rep el nom de terme de correcciÛ dels errors.
El Teorema de RepresentaciÛ de Granger i els models de
Mecanisme de CorrecciÛ dels Errors (MCE)
FormulaciÛ del MCE
Si ε t � iid i 9 cointegraciÛ, llavors líestimaciÛ MQO dels par‡metres de φ i (L) , Ωi (L) i γ i ser‡ consistent i asimptÚticament es distribuir‡ segons una Normal.