


PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
FACULDADE DE MATEMÁTICA
CÁLCULO NUMÉRICO
Notas de Aula – Aplicações – Exercícios
Eliete Biasotto Hauser

























































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Apostila que contém teoria e tutorial sobre utilização de softwares de cálculo numérico
Tipologia: Notas de estudo
1 / 114

Esta página não é visível na pré-visualização
Não perca as partes importantes!
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL
FACULDADE DE MATEMÁTICA
Notas de Aula – Aplicações – Exercícios
Eliete Biasotto Hauser
Um número y na base β ≥ 2 , y = a (^) nan − 1 L a 3 a 2 a 1 a 0 ,b 1 b 2 Lpode ser descrito
na forma
Por exemplo, 3517 , 26 = 3 × 103 + 5 × 102 + 1 × 10 + 7 + 2 × 10 −^1 + 6 × 10 −^2 Em aritmética de ponto flutuante normalizado de t dígitos, y tem a forma:
i) 0 , d 1 d 2 L dt é a mantissa (uma fração na base β),
iii) “e” é um expoente inteiro que varia no intervalo [m,M]. M e m dependem da máquina utilizada. Em geral, m = -M∈Z. iv) t define a precisão da máquina, é o número de dígitos da mantissa. Obs: precisão ≠ exatidão(depende da precisão da máquina e do algorítmo utilizado)
A união de todos os números de ponto flutuante normalizados com o zero: m t vezes
é chamado Sistema de Ponto Flutuante Normalizado e representado por F(β, t, m, M). Alguns exemplos de máquinas com precisão simples: a) HP 48 : F(10, 12, -498, 500) b) IBM 3090 : F(16, 6, -64, 63) c) Cray1 : F(2, 48, -8192, 8191) d) Burroughs B6700: F(8, 13, -63, 64)
Em F valem as propriedades:
t vezes
Se y ∈ F , então − y ∈ F.
0 ∈ F e 1 ∈ F.
Se o expoente da base não pertencer a [m,M], y não pode ser representado em F. São os casos de erro de:
E.B.Hauser – Cálculo Numérico
Se a representação do real y em F não é exata, é necessário utilizar um arredondamento. Os tipos de arredondamento mais conhecidos são:
Quando se aproxima um número real x por x *, o erro que resulta é x-x *. Define-se:
erro absoluto : EA = x − x * e o erro relativo : ER = x
x − x * para x ≠ 0.
A fim de ver o tipo de situação que pode ocorrer um erro relativo de grande magnitude, vamos considerar a diferença entre os números a seguir, por exemplo: x = 0, y = 0, x − y = 0,0001248121=0,1248121 x 10 - Se os cálculos forem feitos em F(10, 5, -499, 499) com arredondamento Ox: x= 0,37215, y= 0,37202 e x-y= 0,00013 = 0,13000 x 10- Assim, o erro relativo entre os dois resultados é grande:
0,1248121x 10 -^3
0,1248121x 10 -^30 , 13000 x 10 -^3 x y
x y (x-y) ≈
Na resolução de um problema o valor exato da solução x pode ser desconhecido. Podemos usar duas aproximações sucessivas de x, definindo:
( , 1 ) 0 , 3 log x k
xk xk
o qual expressa o número de dígitos significativos exatos de x (^) k em relação a x (^) k + 1. Aqui
to for Ox ).
E.B.Hauser – Cálculo Numérico
∑
i 0
i!
( x)i e x e
∑
i 0
i!
xi
ex
x^1 e
com 26 termos cada e comparar com e −^^8_._^3 ≈^ 0.2485168271x
a) p( x) = x^3 − 5 x^2 + 6 x + 0. 55 b) p( x) = ((x − 5 )x + 6 )x + 0. 55
Em ambos os casos estimar o erro absoluto ao comparar com p(2.73) ≈ 0.11917x
1 0
( ) 1 a x a x a x a xn an xn p x an + + + + +
exige n adições e (n
2 +n)/2 multiplicações enquanto que o algoritmo de Horner { 1 )^2 ) ...^2 )^1 )^0 1
( ) (((...( anx an x an x a x a x a n
p x + − + − + + + −
requer n adições e n multiplicações.
Sejam A, B, C e D matrizes genéricas de ordem 10x20, 20x50, 50x1 e 1x respectivamente. Utilizando a propriedade associativa, pode-se determinar o produto matricial AxBxCxD de diversas formas. Qual das duas abaixo é mais eficiente? Porque? a) Ax(Bx(CxD)) b) (Ax(BxC))xD
Representar o número real x na base 2 usando 8 algarismos significativos? Essa representação é exata? a) x=0.6 b) x=13.25 c) x= 2.
Determinar o cardinal , regiões de underflow e overflow e todos elementos reais de: a) F(2,3,-1,2) b) F(3,2,-1,2) c) F(2,2,-2,2)
Representar, se possível, os números abaixo em utilizando arredondamento por truncamento( ∇ x )e arredondamento para número mais próximo de máquina (Ox) em F(10,5,-2,2).
a) 3 b) 3
c) 3
d) e e) 3000
f) 2
=
i
i
a) Calcular o valor de A utilizando precisão infinita.. b) Utilizando arredondamento por truncamento ( ∇ x ) em F(10,3,-98,98), estimar o valor de A somando da direita para esquerda e após somando da esquerda para a direita. Comparar os resultados.
1 - Teoria dos Erros
Respostas:
exp(-8.3); . > f1:=sum(((-x)^i)/i!, i=0..25): > f1a:=unapply(f1,x): > f1a(8.3); -. Obs: Causas desse erro: subtração de grandezas muito próximas e adição de grandezas de diferentes ordens. > > f2:=1/(sum(((x)^i)/i!, i=0..25)): > f2a:=unapply(f2,x): > f2a(8.3); .
a)p(2.73)= -0.05 ,erro absoluto = 0. b)p(2.73)=0.032 ,erro absoluto = 0.
(Ax(BxC))xD é mais eficiente pois exige 2200 multiplicações enquanto que para calcular o produto Ax(Bx(CxD)) são necessárias 125000 multiplicações. OBS: Se M é de ordem pxq e N de ordem qxr, então MxN, de ordem pxr, é obtida efetuando pqr operações de multiplicações de elementos de M e N.
4-a) ( , )0 6 10 ≈ ( ,0 10011001 ) 2 b) ( 13 , 25 ) 10 ≈ ( 1101 , 01 ) 2 c) ( .2 47 ) 10 ≈( 10 011110 , ) 2
5)-a) 0, 1/4, 1/2, 1, 2, 5/16, 5/8, 5/4, 5/2, 3/8, 3/4, 3/2, 3, 7/16, 7/8, 7/4, 7/2 e simétricos.
Região de underflow: (-1/4,1/4) - {0}
b) 0, 1/9, 1/3, 1,3, 4/27, 4/9,4/3, 4, 5/27, 5/9, 5/3, 5, 2/9, 2/3, 2, 6, 7/27, 7/9, 7/3, 7, 8/27, 8/9, 8/3, 8 e seus simétricos. # F = 49 Região de oferflow: ( −∞ −, 8 ) ∪ (8, +∞) Região de underflow: (-1/9,1/9) - {0} c) 0, 1/8, 1/4, 1/2, 1, 2, 3/16, 5/16, 3/4, 3/2, 3, e seus simétricos. # F = 21 Região de oferflow: ( −∞ , ) 3 ∪ ( , 3 +∞) Região de underflow: (-1/8,1/8) - {0}
6-a) 0,1732010^1 e 0,17321 10^1 b) 0,6666610^2 e 0,6666710^2 c) overflow (0,6666610 3 ∉ e 0,6666710^3 ∉ F) d) 0.2718210^1 e 0.2718310^2 e) underflow (0.3333310 –3^ ∉ F) f) 0,1414210^1 e 0,14142 *10^1
7-a) 0,9990234375 b) 0,999 e 0,
E.B.Hauser – Cálculo Numérico
2 - Resolução de Equações Algébricas e Transcendentes
adições e
n n + 1 multiplicações.
O Método de Horner faz esse cálculo com n adições e n multiplicações:
1 parênteses
p x ((( ( anx an ) x a ) x a ) x a n
−
É o algoritmo de Briot-Ruffini utilizado para Deflacionar Raízes. Ex.
2 x 2 x 5 x 6 2 e p 2 2
1 x 1 x 6 x 10 e p 1 0
px x 7 x 16 x 10
2 3
2 2
2 1
3 2
α
α
α
2.1.1-Enumeração das Raízes
complexas.
Regra de Descartes ou Regras de Sinais
seqüência dos coeficientes ou menor do que este por um número inteiro par, sendo uma raiz de multiplicidade “m” contada como “m” raízes e não sendo considerados os coeficientes nulos”.
Regra de Huat
Regra da Lacuna
2 - Resolução de Equações Algébricas e Transcendentes
2.2- Separação de Raízes Reais de f(x)=
a) Métodos Gráficos: Utiliza-se um dos seguintes processos:
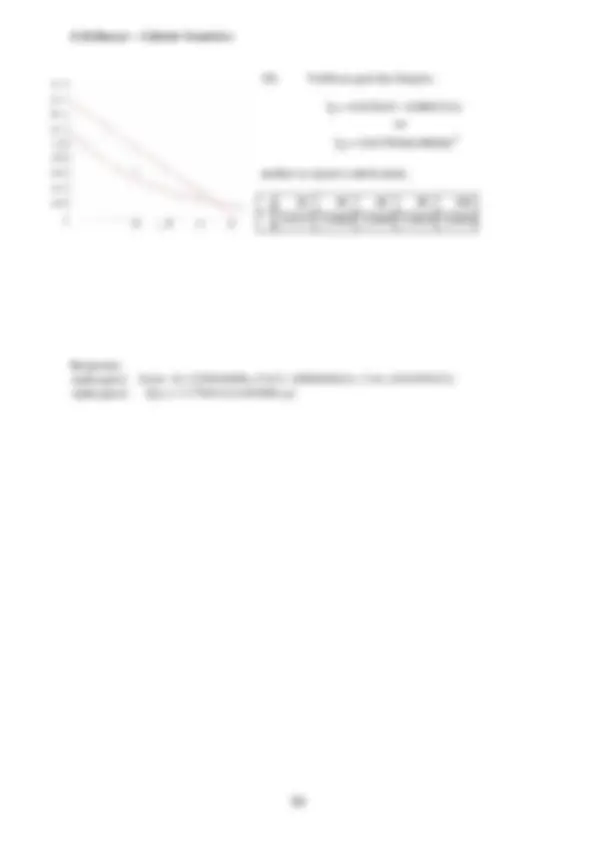
i) esboçar gráfico da função f ( x ) e localizar as abcissas dos pontos onde a curva intercepta o eixo dos x. ii) de f ( ) x = 0 obter uma equação equivalente f (^) 1 ( x ) = f 2 ( ) x. Localizar no mesmo eixo cartesiano os pontos r onde as duas curvas se interceptem: f 1 ( ) r = f 2 ( ) r ⇒ f 1 ( ) r − f 2 ( ) r = 0 ⇒ f ( ) r = 0
b) Método Analítico: Seja f ( x ) continua no intervalo [ a , b ]. Se f ( ) a ⋅ f ( ) b < 0 , então existe pelo menos uma raiz de f em ( a ,b ). (Se o sinal de f 'é constante em ( a ,b )a raiz é única nesse intervalo).
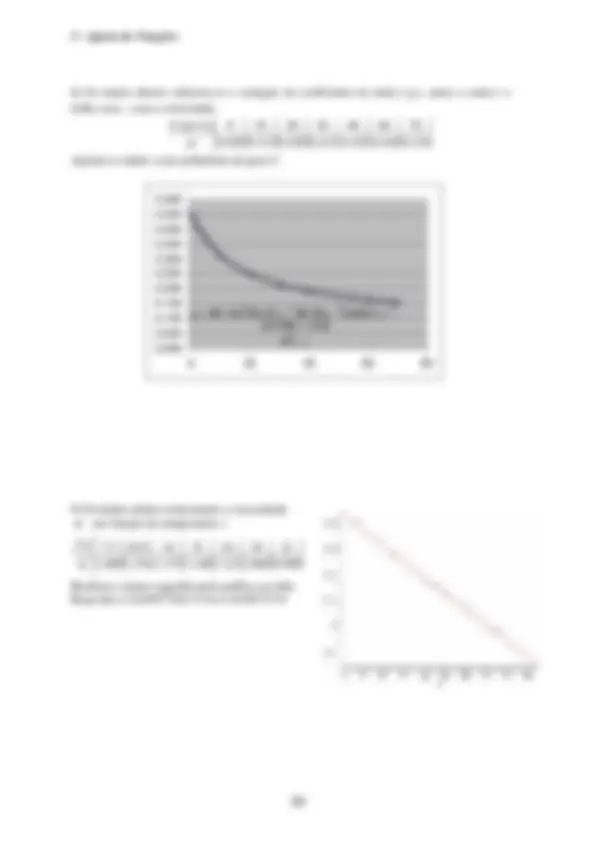
Ex. : p ( ) x = x^3 − 9 x + 3
a) Análise gráfica:
Logo, existem três raízes reais: r 1 ∈( − 4 , − 3 ) r 2 ∈( 0 , 1 ) , r 3 ∈( 2 , 3 )
b) analiticamente:
Obs: Devemos dar uma atenção especial para os casos de: ¾ Raízes muito próximas. ¾ para raízes de multiplicidade par não ocorre troca de sinal.
( ) 25 3 13 , 3923 11 3 5 7 , 3923 7 3
p x
x
E.B.Hauser – Cálculo Numérico
Ex1: p ( ) x = x^4 − 3 x^3 + 3 , 37 x^2 − 1 , 68 x + 0 , 3136
r 1 (^) = 0 , 7 e r 2 ≅ 0 , 8 são raízes de multiplicidade 2.
2.3- Métodos para Resolução de equações algébricas e transcendentes
Qualquer método deve observar um critério de parada, ao qual está associado um estimador
1
k
k k x
x x
2.3.1-Método da Bisseção ou Dicotomia (Algoritmo de quebra)
Seja f : [ a , b ] →ℜcontinua e tal que f ( a ) ⋅ f ( ) b < 0.
a b x (^) m
= , dividindo-se [ a , b ]em dois novos intervalos :
[ a , xm ], [ x (^) m , b ]
Características: É simples a convergência lenta mas garantida. A velocidade de convergência é 0 , 3 ⋅ DIGSE /passo, isto é, a cada 3 ou 4 passos ganha-se um DIGSE.
Ex: p ( ) x = x^4 + 2 x^3 − 7 , 5 x^2 − 20 x − 11 a) Enumeração das raízes de p ( x )
Regras de Huat e Lacuna ℜ^ + ℜ− ⊂^ total não aplicam
E.B.Hauser – Cálculo Numérico
A seqüência de aproximação xi , converge para a solução x*^ da equação f ( ) x = 0 sob certas condições. A construção de G não é única. A escolha de uma G apropriada é dita “problema do ponto fixo. Ex. x^2 + x − 6 = 0.
( ) 1
x
x
a G x x b G x c G x G
Embora não seja preciso usar métodos numéricos para encontrar as duas raízes reais
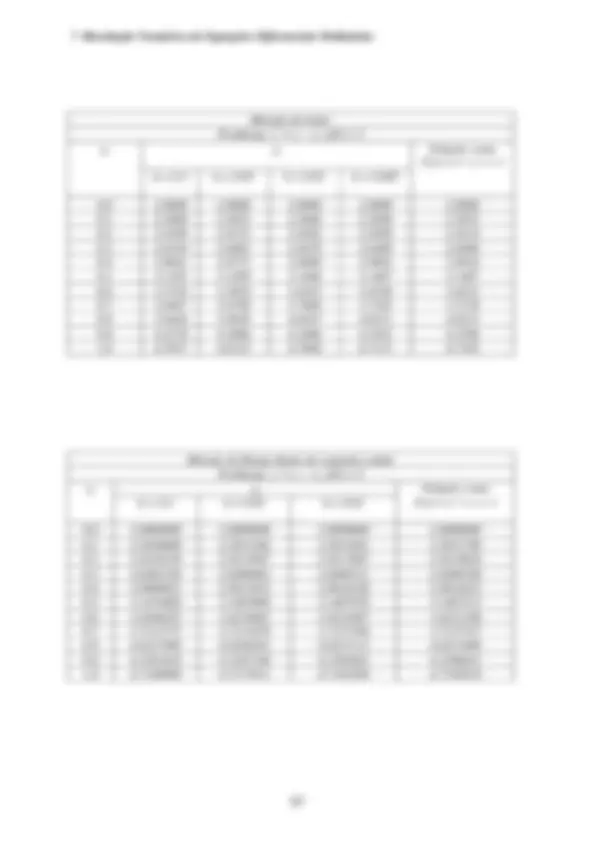
i) Tomando G 1 e x 0 (^) = 1 , 5 , a seqüência { xi }não converge para 2. xi (^) + 1 = G 1 ( xi )
( ) ( ) ( ) ( ) ( ) M
5 1 4
4 1 3
2 3 1 2
2 2 1 1
2 1 1 0
x G x
x G x
x G x
x G x
x G x
ii) Tomando G 2 e x 0 (^) = 1 , 5 , a seqüência { xi }converge para 2.
( ) ( ) ( ) ( ) ( ) ( ) ( ) M
x 2 , 00002980181
x 1 , 99988079186
x 2 , 00047681835
x 1 , 99809249923
x 2 , 00762636454
x 1 , 9694363804
x 6 1 , 5 2 , 12132034356
7 2 6
6 2 5
5 2 4
4 2 3
3 2 2
2 2 1
1 2 0
G x
G x
G x
G x
G x
G x
G x
Teorema da Convergência: Seja α uma raiz isolada de f em [ a , b ]. Se i) G e G’são contínuas em [ a , b ]; ii) G' (x) 〈 1 , ∀ x ∈( a,b ); iii) x 0 ∈Ι e xk + 1 = G(xk) ∈( a,b ) , k = 0 , 1 , 2 ,... , então a seqüência { xk }, gerada por xk (^) + 1 = G ( xk ),converge para α.
2 - Resolução de Equações Algébricas e Transcendentes
Ex: Utilizando o método da iteração linear calcule a raiz de f ( x ) = ex^ + x^3 , com DIGSE ( xk , xk + 1 ) ≥ 5
( )
(^33)
x x
x x
x e e
f x e x x e
Seja
( )
( ) ( )
'( ) 0 0 , 33
3
G x e G
Gx e x
x
G e G’ são continuas em [-1,0] e G ' ( ) x < 1 ∀ x ∈[− 1 , 0 ].
Logo , a seqüência gerada por 1 3
x i xi (^) + =− e converge para α ∀ x ∈[− 1 , 0 ]. Seja x 0 =− 0 , 5
5 10
4 9
3 8
2 7
1 6
x x
x x
x x
x x
x x
( ) ( , ) 5 , 34
9 10
9 ≅
DIGSEx x
f x e
*G não tem Maximo nem mínimo local em [0,1], testa-se então só os extremos.
Características do Método da Iteração Linear:
um fato constante). ¾ A velocidade de convergência depende de G ' ( x ), quanto menor este valor, maior será a convergência.
2 - Resolução de Equações Algébricas e Transcendentes
Convergência: (é trabalhoso mostrar que G' (x) < 1 ).
O método de Newton-Raphson converge se: 2 ( '( ))^2 1 ( ) "( ) ( '( ))
' ( ) f x f x f x f x
f x f x G x = < ⇒ <.
Para raízes simples a convergência é quadrática e para raízes duplas ou triplas é linear.
Se f b f b x b
f a f a x a ⋅ > ⇒ =
0
0 ( ) "( ) 0
Caso contrário, pode-se considerar 2
0
a b x
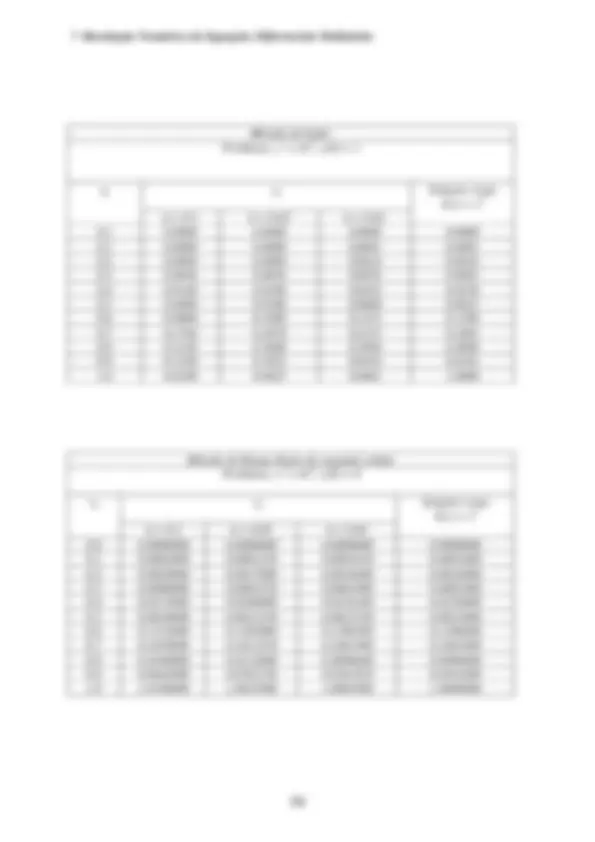
Ex.: 1) Estimar o valor da única raiz real de f (x) = 2 x + lnx , utilizando Newton-Raphson.
x (^) k + 1
xk (^) + 1 x k
f (xk + 1 )
f (xk )
f (x) = 2 x + ln x
x
2 x lnx x, x −
E.B.Hauser – Cálculo Numérico
k
k k k 1 k x
2 x lnx x x
4 3
3
2
1
0
x x
x 0 , 426302751
x 0 , 42699599
x 0 , 42
x 0 , 5
p ( 3 )⋅ p "( 3 )< 0 e p ( 4 )⋅ p "( 4 )> 0 ⇒ x 0 = 4
3 2
4 3 2 1
k k k
k k k k k k x x x
x x x x x x
6 5
5
4
3
2
1
0
x x
x
x
x
x
x
x
Obs: O Método de Newton pode divergir devido ao uso da tangente, oscilando indefinidamente.
Uma aproximação para a raiz é r 4 = 3 , 03524990 com 9 dígitos significativos e 5 iterações.