



Copyright 2006 – João Pedro Filho – Todos direitos Reservados
1
www.apostilastecnicas.com









































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
CLP BÁSICO
Tipologia: Notas de estudo
1 / 82

Esta página não é visível na pré-visualização
Não perca as partes importantes!
1 www.apostilastecnicas.com
2 ÍNDICE DE TÓPICOS I. Introdução II. Informações Gerais II.1. DESCRIÇÃO II.2. CARACTERÍSTICAS II.3. HISTÓRICO II.4. EVOLUÇÃO II.5. APLICAÇÕES III. Estrutura Básica III.1. UNIDADE CENTRAL DE PROCESSAMENTO (UCP) III.2. MEMÓRIA III.3. DISPOSITIVOS DE ENTRADA E SAÍDA III.3.1. CARACTERÍSTICAS DAS ENTRADAS E SAÍDAS - E/S MÓDULOS DE ENTRADA TRATAMENTO DE SINAL DE ENTRADA MÓDULOS DE SAÍDA TRATAMENTO DE SINAL DE SAÍDA III.4. TERMINAL DE PROGRAMAÇÃO IV. Princípio de Funcionamento de um CLP IV.1. ESTADOS DE OPERAÇÃO IV.2. FUNCIONAMENTO V. Linguagem de Programação V.1. CLASSIFICAÇÃO LINGUAGEM DE BAIXO NÍVEL LINGUAGEM DE ALTO NÍVEL
4 I. Introdução O Controlador Lógico Programável, ou simplesmente CLP, tem revolucionado os comandos e controles industriais desde seu surgimento na década de 70. Antes do surgimento dos CLPs as tarefas de comando e controle de máquinas e processos industrias eram feitas por relés eletromagnéticos, especialmente projetados para este fim. II. Informações Gerais II.1. DESCRIÇÃO O primeiro CLP surgiu na indústria automobilística, até então um usuário em potencial dos relés eletromagnéticos utilizados para controlar operações sequenciadas e repetitivas numa linha de montagem. A primeira geração de CLPs utilizou componentes discretos como transistores e CIs com baixa escala de integração. Este equipamento foi batizado nos Estados Unidos como PLC ( Programable Logic Control ),^ em^ português^ CLP^ (^ Controlador Lógico Programável ) e este termo é registrado pela Allen Bradley ( fabricante de CLPs). Definição segundo a ABNT (Associação Brasileira de Normas Técnicas) É um equipamento eletrônico digital com hardware e software compatíveis com aplicações industriais. Definição segundo a Nema (National Electrical Manufacturers Association) Aparelho eletrônico digital que utiliza uma memória programável para o armazenamento interno de instruções para implementações específicas, tais como lógica, seqüenciamento, temporização, contagem e aritmética, para controlar, através de módulos de entradas e saídas, vários tipos de máquinas ou processos.
5
Basicamente, um controlador programável apresenta as seguintes características: ⇒ Hardware e/ou dispositivo de controle de fácil e rápida programação ou reprogramação, com a mínima interrupção da produção. ⇒ Capacidade de operação em ambiente industrial. ⇒ Sinalizadores de estado e módulos tipo plug-in de fácil manutenção e substituição. ⇒ Hardware ocupando espaço reduzido e apresentando baixo consumo de energia. ⇒ Possibilidade de monitoração do estado e operação do processo ou sistema, através da comunicação com computadores. ⇒ Compatibilidade com diferentes tipos de sinais de entrada e saída. ⇒ Capacidade de alimentar, de forma contínua ou chaveada, cargas que consomem correntes de até 2 A. ⇒ Hardware de controle que permite a expansão dos diversos tipos de módulos, de acordo com a necessidade. ⇒ Custo de compra e instalação competitivo em relação aos sistemas de controle convencionais. ⇒ Possibilidade de expansão da capacidade de memória. ⇒ Conexão com outros CLPs através de rede de comunicação. II.3. HISTÓRICO O controlador programável nasceu praticamente dentro da indústria automobilística americana, especificamente na Hydromic Division da General Motors, em 1968, devido a grande dificuldade de se mudar a lógica de controle de painéis de comando a cada mudança na linha de montagem. Estas mudanças implicavam em altos gastos de tempo e dinheiro. Sob a liderança do engenheiro Richard Morley, foi preparada uma especificação que refletia os sentimentos de muitos usuários de relés, não só da indústria automobilística como de toda a indústria manufatureira. Nascia assim a indústria de controladores programáveis, hoje com um mercado mundial estimado em 4 bilhões de dólares anuais. Que no Brasil é estimado em 50 milhões de dólares anuais.
7 Todas estas considerações mostram a evolução de tecnologia, tanto de hardware quanto de software, o que permite o seu acesso a um maior número de pessoas tanto nos projetos de aplicação de controladores programáveis quanto na sua programação. II.5. APLICAÇÕES O controlador programável existe para automatizar processos industriais, sejam de sequênciamento, intertravamento, controle de processos, batelada, etc. Este equipamento tem seu uso tanto na área de automação da manufatura, de processos contínuos, elétrica, predial, entre outras. Praticamente não existem ramos de aplicações industriais onde não se possa aplicar os CLPs, entre elas tem-se: ⇒ Máquinas industriais (operatrizes, injetoras de plástico, têxteis, calçados); ⇒ Equipamentos industriais para processos ( siderurgia, papel e celulose, petroquímica, química, alimentação, mineração, etc ); ⇒ Equipamentos para controle de energia (demanda, fator de carga); ⇒ Controle de processos com realização de sinalização, intertravamento e controle PID; ⇒ Aquisição de dados de supervisão em: fábricas, prédios inteligentes, etc; ⇒ Bancadas de teste automático de componentes industriais; ⇒ Etc. Com a tendência dos CLPs terem baixo custo, muita inteligência, facilidade de uso e massificação das aplicações, a utilização deste equipamento não será apenas nos processos mas também nos produtos. Poderemos encontrá-lo em produtos eletrodomésticos, eletrônicos, residências e veículos.
8 III. Estrutura Básica O controlador programável tem sua estrutura baseada no hardware de um computador, tendo portanto uma unidade central de processamento (UCP), interfaces de entrada e saída e memórias. As principais diferenças em relação a um computador comum estão relacionadas a qualidade da fonte de alimentação, que possui características ótimas de filtragem e estabilização, interfaces de E/S imune a ruídos e um invólucro específico para aplicações industriais. Temos também um terminal usado para programação do CLP. O diagrama de blocos a seguir, ilustra a estrutura básica de um controlador programável: Dentre as partes integrantes desta estrutura temos: ⇒ UCP ⇒ Memória ⇒ E/S (Entradas e Saídas) ⇒ Terminal de Programação Unidade Central de Processamento (UCP) MEMÓRIA INTERFACE DE E/S PROCESSADOR FONTE DE ALIMENTAÇÃO CARTÕES DE ENTRADA CARTÕES DE SAÍDA TERMINAL DE PROGRAMAÇÃO
10 Processamento por interrupção Certas ocorrências no processo controlado não podem, algumas vezes, aguardar o ciclo completo de execução do programa. Neste caso, ao reconhecer uma ocorrência deste tipo, a UCP interrompe o ciclo normal de programa e executa um outro programa chamado de rotina de interrupção. Esta interrupção pode ocorrer a qualquer instante da execução do ciclo de programa. Ao finalizar esta situação o programa voltará a ser executado do ponto onde ocorreu a interrupção. Uma interrupção pode ser necessária , por exemplo, numa situação de emergência onde procedimentos referentes a esta situação devem ser adotados. Processamento comandado por tempo Da mesma forma que determinadas execuções não podem ser dependentes do ciclo normal de programa, algumas devem ser executados a certos intervalos de tempo, as vezes muito curto, na ordem de 10 ms. Este tipo de processamento também pode ser incarado como um tipo de interrupção, porém ocorre a intervalos regulares de tempo dentro do ciclo normal de programa. Processamento por evento Este é processado em eventos específicos, tais como no retorno de energia, falha na bateria e estouro do tempo de supervisão do ciclo da UCP. Neste último, temos o chamado Watch Dog Time (WD), que normalmente ocorre como procedimento ao se detectar uma condição de estouro de tempo de ciclo da UCP, parando o processamento numa condição de falha e indicando ao operador através de sinal visual e as vezes sonoro.
11
O sistema de memória é uma parte de vital importância no processador de um controlador programável, pois armazena todas as instruções assim como o os dados necessários para executá-las. Existem diferentes tipos de sistemas de memória. A escolha de um determinado tipo depende: ⇒ do tipo de informação armazenada; ⇒ da forma como a informação será processada pela UCP. As informações armazenadas num sistema de memória são chamadas palavras de memória , que são formadas sempre com o mesmo número de bits. A capacidade de memória de um CP é definida em função do número de palavras de memória previstas para o sistema. Mapa de memória A capacidade de memória de um CP pode ser representada por um mapa chamado mapa de memória. 8, 16, ou 32 bits 255 511 Decimal Octal Hexadecimal ENDEREÇO DAS PALAVRAS DE MEMÓRIA 377 FF 777 1FF 1023 1777 3FF 2047 4095 3777 7FF 7777 FFF 8191 17777 1FFF
13 Tipo de Memória Descrição Observação RAM DINÂMICA Memória^ de^ acesso aleatório
14 MEMÓRIA EXECUTIVA MEMÓRIA DO SISTEMA MEMÓRIA DE STATUS MEMÓRIA DE DADOS MEMÓRIA DO USUÁRIO Memória Executiva É formada por memórias do tipo ROM ou PROM e em seu conteúdo está armazenado o (^) sistema operacional responsável por todas as operações que são realizadas no CLP. O usuário não tem acesso a esta área de memória. Memória do Sistema Esta área é formada por memórias tipo (^) RAM , pois terá o seu conteúdo constantemente alterado pelo sistema operacional. Armazena resultados e/ou operações intermediárias, geradas pelo sistema, quando necessário. Pode ser considerada como um tipo de (^) rascunho. Não pode ser acessada nem alterada pelo usuário. Memória de Status de E/S ou Memória Imagem A memória de status dos módulos de E/S são do tipo RAM. A UCP, após ter efetuado a leitura dos estados de todas as entradas, armazena essas informações na área denominada status das entradas ou imagem das entradas. Após o processamento dessas informações, os resultados serão armazenados na área denominada status das saídas ou imagem das saídas.
16
Os dispositivos de entrada e saída são os circuitos responsáveis pela interação entre o homem e a máquina; são os dispositivos por onde o homem pode introduzir informações na máquina ou por onde a máquina pode enviar informações ao homem. Como dispositivos de entrada podemos citar os seguintes exemplos: leitor de fitas magnéticas, leitor de disco magnético, leitor de cartão perfurado, leitor de fita perfurada, teclado, painel de chaves, conversor A/D, mouse, scaner, etc. Estes dispositivos tem por função a transformação de dados em sinais elétricos codificados para a unidade central de processamento. Como dispositivos de saída podemos citar os seguintes exemplos: gravador de fitas magnéticas, gravador de discos magnéticos, perfurador de cartão, perfurador de fita, impressora, vídeo, display, conversor D/A, canal de som, etc. Todos eles tem por função a transformação de sinais elétricos codificados pela máquina em dados que possam ser manipulados posteriormente ou dados que são imediatamente entendidos pelo homem. Estes dispositivos são conectados à unidade central de processamento por intermédio de "portas" que são interfaces de comunicação dos dispositivos de entrada e saída. A estrutura de E/S (entradas e saídas) é encarregada de filtrar os vários sinais recebidos ou enviados para os componentes externos do sistema de controle. Estes componentes ou dispositivos no campo podem ser botões, chaves de fim de curso, contatos de relés, sensores analógicos, termopares, chaves de seleção, sensores indutivos, lâmpadas sinalizadoras, display de LEDs, bobinas de válvulas direcionais elétricas, bobinas de relés, bobinas de contatoras de motores, etc. Em ambientes industriais, estes sinais de E/S podem conter ruído elétrico, que pode causar operação falha da UCP se o ruído alcançar seus circuitos. Desta forma, a estrutura de E/S protege a UCP deste tipo de ruído, assegurando informações confiáveis. A fonte de alimentação das E/S pode também constituir-se de uma única unidade ou de uma série de fontes, que podem estar localizadas no próprio compartimento de E/S ou constituir uma unidade à parte. Os dispositivos do campo são normalmente selecionados, fornecidos e instalados pelo usuário final do sistema do CLP. Assim, o tipo de E/S é determinado, geralmente, pelo nível de tensão (e corrente, nas saídas) destes dispositivos. Os circuitos de E/S são tipicamente fornecidas pelos fabricantes de CLPs em módulos, cada um com 4, 8, 16 ou mais circuitos. Além disso, a alimentação para estes dispositivos no campo deve ser fornecida externamente ao CLP, uma vez que a fonte de alimentação do CLPs é projetada para operar somente com a parte interna da estrutura de E/S e não dispositivos externos.
17
A saída digital basicamente pode ser de quatro tipos: transistor, triac, contato seco e TTL podendo ser escolhido um ou mais tipos. A entrada digital pode se apresentar de várias formas, dependendo da especificação do cliente, contato seco, 24 VCC, 110 VCA, 220 VCA, etc. A saída e a entrada analógicas podem se apresentar em forma de corrente ( a 20 mA, 0 a 10 mA, 0 a 50 mA), ou tensão (1 a 5 Vcc, 0 a 10 VCC, - 10 a 10 VCC etc). Em alguns casos é possível alterar o ranger da através de software. MÓDULOS DE ENTRADA Os módulos de entrada são interfaces entre os (^) sensores localizados no campo e a lógica de controle de um controlador programável. Estes módulos são constituídos de cartões eletrônicos, cada qual com capacidade para receber em certo número de variáveis. Pode ser encontrado uma variedade muito grande de tipos de cartões, para atender as mais variadas aplicações nos ambientes industriais. Mas apesar desta grande variedade, os elementos que informam a condição de grandeza aos cartões, são do tipo: ELEMENTO DISCRETO : Trabalha com dois níveis definidos; ELEMENTO ANALÓGICO : Trabalha dentro de uma faixa de valores.
19 As entradas dos CLPs têm alta impedância e por isso não podem ser acionadas diretamente por um triac, como é o caso do acionamento por sensores a dois fios para CA, em razão disso é necessário, quando da utilização deste tipo de dispositivo de campo, o acréscimo de uma derivação para a corrente de manutenção do tiristor. Essa derivação consta de um circuito resistivo-capacitivo em paralelo com a entrada acionada pelo triac, cujos valores podem ser encontrados nos manuais do CLP, como visto abaixo. Se for ser utilizado um sensor capacitivo, indutivo, óptico ou indutivo magnético, saída à transistor com alimentação de 8 a 30 VCC, basta especificar um cartão de entrada 24 VCC comum negativo ou positivo dependendo do tipo de sensor, e a saída do sensor será ligada diretamente na entrada digital do CLP. A entrada digital do tipo contato seco fica limitada aos dispositivos que apresentam como saída a abertura ou fechamento de um contato. É bom lembrar que em alguns casos uma saída do sensor do tipo transistor também pode ser usada, esta informação consta no manual de ligação dos módulos de entrada.
20
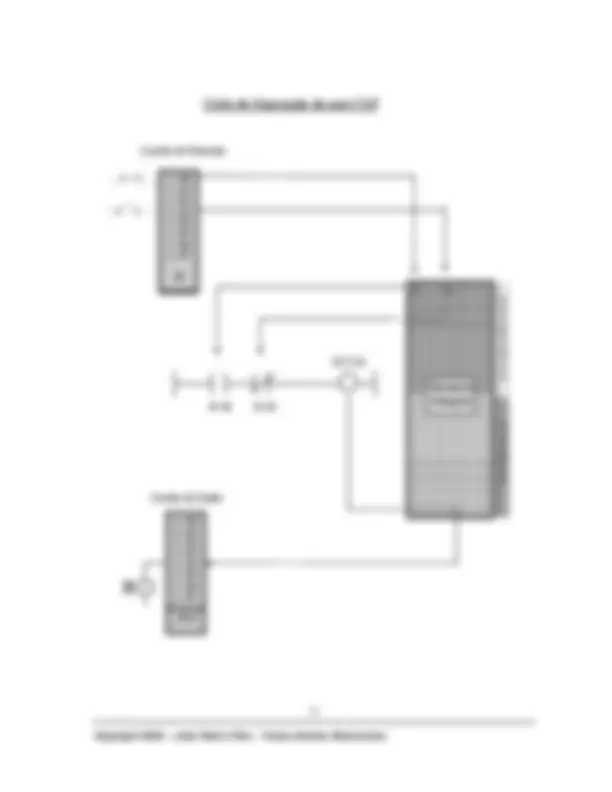
C.A. - Cartão Analógico A entrada analógica em corrente é implementada diretamente no transmissor como mostra o diagrama. TRANSMISSORES UCP
TACO GERADOR TERMOPAR TERMO RESISTÊNCIA SENSOR DE POSIÇÃO OUTROS fonte