Baixe Controle de processos e outras Notas de estudo em PDF para Mecatrônica, somente na Docsity!
Estratégias de Controle Avançado
- Introdução
- Será abordado alguns componentes chaves de simples de controle mais complexos;
- A questão chave é determinar as variáveis de controle que devem ser escolhidas para se controlar um determinando processo.
- Outro problema a ser discutido é a questão da interação entre diferentes malhas de controle.
- Controle Cascata
- Pode ser usado quando existem diversos sinais de medição e uma variável de controle;
- É particularmente útil quando existem dinâmicas significativas, ex., longos tempos de atraso ou constantes de tempo, entre a variável de controle e a variável de processo.
- Um melhor controle pode ser obtido empregando-se variáveis intermediárias que respondem mais rápido ao sinal de controle.
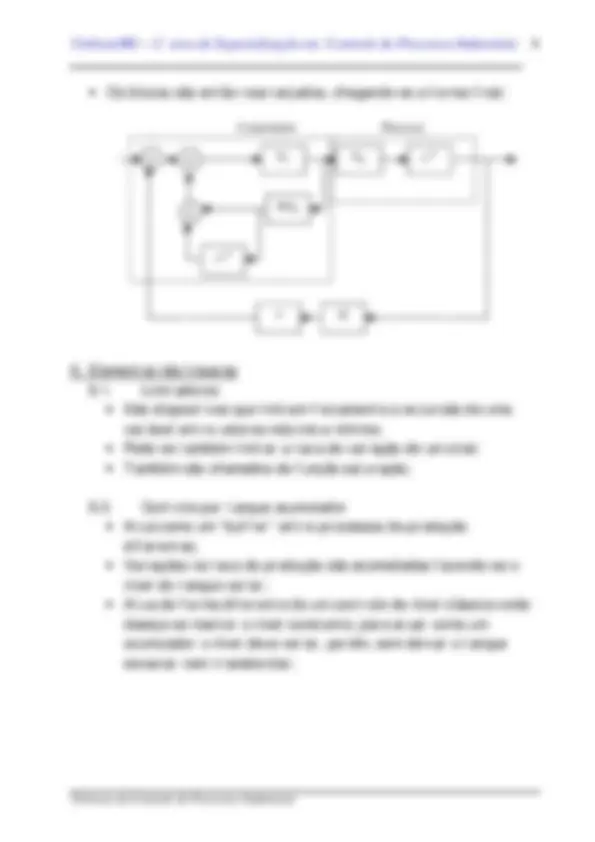
- A malha de controle é construída aninhando-se outras malhas de controle como mostrado na figura abaixo:
2.1. Escolha de variáveis secundárias
- Deve ser verificado se o controle em cascata irá trazer algum benefício;
- As regras básicas para selecionar variáveis secundárias são:
- Deve existir uma relação bem definida entre as variáveis primárias e secundárias;
- Distúrbios essenciais deve agir na malha interna;
C (^) p C (^) s P 1 P (^2)
Processo
Malha interna Malha externa
- A malha interna deve ser mais rápida que a malha externa. Como regra prática a diferença entre constantes de tempo deve ser de pelo menos 5 vezes;
- Deve ser possível ter um alto ganho na malha interna.
- Uma situação comum é de se ter a malha interna ao redor do atuador;
- Pode ser usada para linearizar características não lineares;
2.2. Sintonia e Comissionamento
- Deve ser ajustado seguindo-se uma seqüência correta; primeiro a malha interna depois a externa;
2.3. Saturação da ação integral
- Se for usada a ação integral em ambas as malhas é necessário um esquema para evitar o windup;
- A malha interna pode ser manuseada da forma comum, porém, não é uma tarefa trivial evitar o windup da malha externa;
- Existem três situações que devem ser cobertas:
- O sinal de controle na malha interna pode saturar;
- A malha de controle secundária pode ser chaveada para uma referência interna;
- O controlador secundário é chaveado do modo automático para o manual;
- Isto basicamente requer que um sinal de rastreamento seja injetado no controlador primário;
2.4. Algumas aplicações
- Posicionadores de válvulas
- Controle de motores
- Trocador de calor
- Controle Antecipatório
- No controle por realimentação é necessário que ocorra um erro antes que o controlador tome qualquer ação;
- Como a idéia chave é cancelar dois sinais, é necessário que o modelo seja razoavelmente preciso. Um erro de modelagem de 20% implica que somente 80% do distúrbio será eliminado;
- O Controle antecipatório é muito mais sensível a erros de modelagem que o por realimentação;
- Controle por realimentação e antecipatório tem propriedades complementares;
3.1. Aplicações
- Controle de nível no tubulão
- Seguimento de Modelo
- Esta estratégia é utilizada quando se deseja um controle preciso em resposta a referência; p.ex. quando diversas malhas devem ser coordenadas;
- O método é mostrado na figura abaixo:
L
F F
Turbina
Válvula de vapor
Óleo
Ar
Tubulão
Elevador Entrada inferior
Alimentação de água
Modelo Controlador Processo
Σ
yc ysp e u y
- o modelo de referência é tipicamente escolhido como um sistema dinâmico de primeira ou segunda ordem;
- é necessário que a malha de realimentação seja muito rápida comparada com o modelo de referência;
- o sistema pode ser melhorado consideravelmente introduzindo um controle antecipatório como mostrado na figura abaixo:
- o sinal u (^) ff produzirá a saída desejada se o modelo estiver correto; o erro e será diferente de zero quando a saída desviar do comportamento desejado; o ramo de realimentação gerará ações apropriadas;
- o sistema é dito ter dois graus de liberdade porque os caminhos dos sinais de referência para o controle e saída do processo para o controle são independentes;
4.1. Estrutura geral do controlador
- Pode-se combinar o controle antecipatório para seguimento da referência com o controle antecipatório para minimizar distúrbios de carga, como visto anteriormente;
Modelo Controlador Processo
Σ
yc ysp e u y Σ
Antecipação uff
- Considere o sistema com atraso de transporte dado por:
- O preditor de Smith baseia-se na tentativa de separar o bloco de atraso do processo e projetar o controlador para um sistema ideal sem atraso G (^) p. Para obtermos isto, fazemos:
Gc e-τs^ .Gp
H
Σ
Gc Gp
H
Σ
e-τs
+1 H
-1 H
Σ Σ
- Os blocos são então rearranjados, chegando-se a forma final:
- Elementos não lineares 6.1. Limitadores
- São dispositivos que limitam fisicamente a excursão de uma variável entre valores máximo e mínimo;
- Pode-se também limitar a taxa de variação de um sinal;
- Também são chamados de função saturação;
6.2. Controle por tanque acumulador
- Atua como um “buffer” entre processos de produção diferentes;
- Variações na taxa de produção são acomodadas fazendo-se o nível do tanque variar;
- Atua de forma diferente de um controle de nível clássico onde deseja-se manter o nível constante; para atuar como um acumulador o nível deve variar, porém, sem deixar o tanque esvaziar nem transbordar;
Gc Gp
HGp
Σ e-τs
-e-τs
-1 H
Σ
Σ
Controlador Processo
- Exemplo de aplicação 1: controle combustível puxa ar
- Vantagens: simples e segura para redução de temperatura;
- Desvantagens: lenta, problemas de segurança para elevar temperatura e problemas de qualidade no produto;
Div
SP PI PV
u
y a
yk^ k
y
y
SP PI PV
Σ Π u yk y
b a a(yk +b)
MV PI SP
SP RPI MV
Ar
Óleo
- Exemplo de aplicação 2: controle ar puxa combustível
- Vantagens: simples e segura para aumento de temperatura;
- Desvantagens: lenta, problemas de segurança para baixar temperatura e problemas de qualidade no produto;
6.4. Controle Split Range
- Usado quando há uma variável medida e diversas variáveis controladas; ex.: sistemas de aquecimento e resfriamento integrados;
- Para evitar problemas na região de chaveamento das variáveis controladas emprega-se uma pequena banda morta;
- Pode também ser empregado quando a variável controlada excursiona por uma longa faixa; a vazão é separada em caminhos paralelos cada uma controlada com uma válvula;
6.5. Controle com seletores
- Usado quando há várias variáveis medidas e um atuador;
- O seletor é um dispositivo estático com várias entradas e uma saída; existem dois tipos de seletores: máximo e mínimo;
MV PI SP
SP RPI MV
Ar
Óleo
- Inserindo seletores por mediana é possível ter um sistema que continuará funcionando mesmo na falha de diversos componentes;
- Controle Fuzzy A teoria de conjuntos Fuzzy tem sido empregada com sucesso para exprimir conhecimento impreciso e resolver problemas em muitas áreas onde o modelamento convencional é difícil, ineficiente ou muito oneroso. A possibilidade de descrição lingüistica do modelo, ao invés de utilização das equações diferenciais, possibilita o aproveitamento do conhecimento heurístico dos operadores e facilita o desenvolvimento de soluções.
A estrutura de universo de discurso, variáveis lingüisticas, fuzzificação, banco de regras, máquina de inferência e sistema de defuzzificação proposta por Mandani [1], quando bem assimilada, é uma arma poderosa de simplificação e aumento da velocidade de processamento e robustez do controlador, possibilitando decisões rápidas e coerentes num ambiente de incertezas.
A lógica Fuzzy é uma técnica comparativamente simples e de vasto espectro de aplicabilidade, em particular a problemas de controle e de decisão. A figura abaixo ilustra em blocos o controlador Fuzzy proposto por Mandani:
Portanto, o projeto de um controlador Fuzzy consiste em:
- Definir os universos de discurso das variáveis lingüisticas do sistema, erro, variação do erro e variação da saída do controlador (discretização ou níveis de quantização);
- Definição do número de termos primários e graus de pertinência dos conjuntos difusos que representam cada termo;
Fuzzificador Regras deControle Deuzzificador Processo
- Determinação das regras que formam o algoritmo de controle;
- Definição de parâmetros de projeto, como método de
inferência, lógica a ser empregada, forma de defuzzificação e atuação do controlador [2].
O processo de Fuzzificação
O método escolhido para criar as variáveis lingüisticas foi o proposto em [3]. O grau de participação de uma determinada grandeza de entrada é dado em função dos termos primários definidos para o universo de discurso da entrada. Os termos com formas simples tais como trapézios e triângulos são geralmente utilizados para representar as funções de grau de participação, porém, qualquer tipo de função pode ser utilizada. O número de termos primários a serem utilizados e suas formas depende da precisão requerida, tipo de resposta e estabilidade do sistema, facilidade de implementação, manuseio e manutenção, etc. A figura abaixo apresenta uma representação típica de um termo primário.
Esta função pode ser representada por apenas 5 (cinco) variáveis, ao invés da tradicional função de participação mostrada acima. Sabemos que para os valores do universo de discurso abaixo de p 1 e acima de p 2 , o grau de participação é zero. Por outro lado, a partir dos valores de Delta 1 *alfa 1 , Delta 2 *alfa 2 , e do limite superior, determinando qual destas três grandezas apresenta o menor grau de participação, chegamos ao valor fuzzificado da função. Se chamarmos a função acima deíndice de jovialidade, representaremos o valor fuzzificado como “índice de jovialidade = f(x)”, onde f(x) é o grau de participação e x é o valor inteiro não fuzzificado (crisp) no universo de discurso.
[Universo]
Negativo Zero Positivo
taxa_er_Z = Zero (taxa_do_erro); taxa_er_P = Positivo (taxa_do_erro);
onde er_N significa o grau de participação do valor de erro na função Negativo segundo a regra acima, e assim sucessivamente.
- Posteriormente estes valores serão combinados na máquina de inferência para produzir uma saída Fuzzy que deverá ser convertida numa valorcrisp na saída.
Máquina de Inferência
Para controlarmos adequadamente um processo, precisamos codificar o conhecimento que temos sobre o mesmo na forma de regras “Se antecedente entãoconseqüente” e de um mecanismo que avalie quais regras são pertinentes, e as aplique produzindo uma saída (conseqüente).
No caso do controlador, o antecedente é função do erro (erro) e da taxa de variação do erro (delta_er). O valor a ser obtido na saída será dado pelo valor do menor grau de participação entre os antecedentes (erro e delta_er) ou seja, pela interseção dos termos lingüisticos correspondentes ao erro e a variação do erro. O menor grau de participação será o valor do grau de participação na saída. Exemplo:
Se erro = Negativo e delta_er = Negativo então Saída = Positivo
Sendo o grau de participação de erro = 0,7 (Negativo) e delta_er = 0,5 (Negativo) então a saída será Positiva = 0,5.
Se tivermos mais do que uma regra com o mesmo termo lingüistico na saída (exemplo: Positivo), a prática comum é usar o maior grau de participação (união de conjuntos Fuzzy). Exemplo:
R1: Se erro = Negativo (0,7) e delta_er = Negativo (0,5) então saída = Positivo R2: Se erro = Negativo (0,7) e delta_er = Zero (1,0) então saída = Positivo
A regra R1 produzirá saída = Positivo (0,5) e a regra R2 produzirá saída = Positivo (0,7). A combinação das duas regras nos dá saída = Positivo (0,7).
Resumindo: a operação “e” lógico (interseção) de fatos “a” e “b” é resolvida através do valor mínimo entre “a” e “b”; a operação “ou” lógico (união) de regras “a” e “b” é resolvida através do valor máximo entre “a” e “b”.
Na prática, as operações para se obter o algoritmo de controle consistem nos seguintes procedimentos:
- Para cada fator da parte “Se” da regra: obter um grau de participação do valor de entrada para cada função de associação ou termo lingüistico;
- O mínimo valor dos graus de participação obtidos em 1 é o grau de participação da parte “Se” (antecedente);
- Aplicar um limitador na função de associação da parte “então” através do fator obtido;
- Repetir de 1 a 3 para todas as regras e obter a soma lógica “OU” das funções de associação dadas pelas partes “então” (conseqüente) de cada regra.
- Calcular a defuzzificação da função de associação resultante e obter o valor de saída.
O processo de defuzzificação
No estágio do defuzzificador, a variável difusa produzida pela máquina de inferência é transformada em variável numérica (determinística) que atuará no processo de forma a regulá-lo.
vez que um Singleton intercepta o eixo x em um único ponto, o cálculo do centro de gravidade se reduz apenas ao cálculo da média ponderada dos valores de x para cada Singleton e de seu grau de participação. max 1 max 2
_ 1 * max 1 _ 2 * max 2 Vlr termo Vlr termo saída Singleton termo Vlr termo Singleton termo Vlr termo
= +
A literatura disponível tem mostrado que os controladores Fuzzy vem sendo aplicados com sucesso no controle de processos onde os controladores convencionais falham ou não exibem um bom desempenho devido, principalmente, a um conhecimento impreciso do comportamento dinâmico e dos parâmetros do processo.
- Malhas com interação
- Pode-se construir sistemas complexos a partir de componentes simples através da decomposição;
- O sistema complexo é obtido por refinamentos graduais;
- Algumas desvantagens deste método são:
- Uma vez que não determinamos as limitações fundamentais, é difícil decidir quando novos refinamentos não trarão novos benefícios;
- É fácil obter sistemas que são desnecessariamente complicados; pode-se obter sistemas onde malhas de controle brigam entre si;
- Há casos onde é difícil chegar a um bom sistema através deste método passo a passo;
- Se há dificuldades é necessário usar ferramentas de modelagem matemática, análise e simulação;
8.1. Sistemas paralelos
- São muito comuns. Ex.: motores ligados em paralelo para acionar uma carga comum;
- Para ilustrar as dificuldades de tal controle, considere o sistema mostrado na figura abaixo:
- O sistema pode ser descrito pela equação:
dt Dw M M M^ L J dw + = + − 1 2
- Usando um controlador proporcional, haverá um erro em regime estacionário;
- Para eliminar o erro, emprega-se um controlador PI, como mostrado abaixo:
Distúrbios de medição num motor podem levar a uma distribuição de carga desigual em decorrência da integração no processo; tal situação deve ser evitada, o que pode ser conseguido com o sistema abaixo:
8.2. Interação entre malhas simples
- Sistemas com várias entradas e várias saídas são denominados MIMO;
A 1
A 2
C (^1)
C (^2)
wsp
w
redutora
PI
PI
Motor 1
Motor 2
Σ s
wsp 1 w
α
1-α
Motor 1
Motor 2
Σ s
wsp PI 1 w