Baixe Controle de Processos Automaticos e outras Notas de estudo em PDF para Mecatrônica, somente na Docsity!
page 0
A
C + B
C * B
B
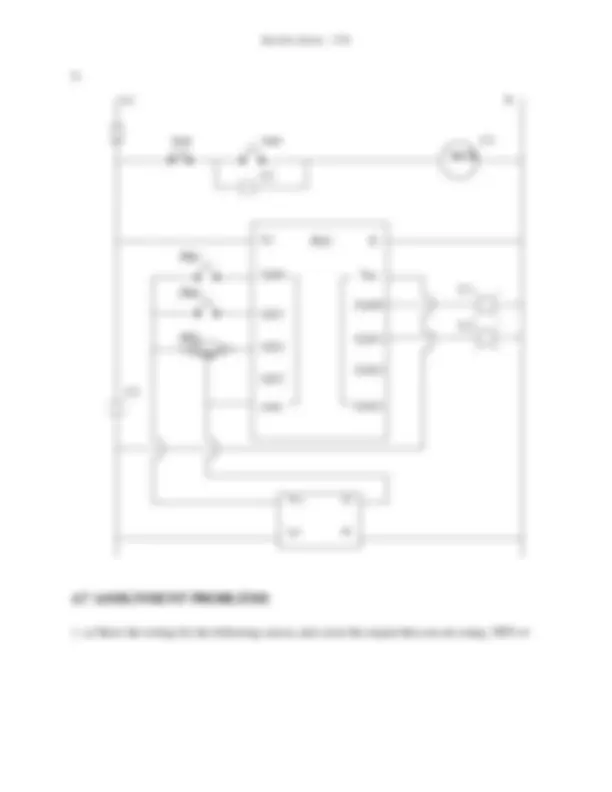
T 1 = ST 2 ⋅ A
T 1
T 2
T 3
T 4
S T 1
S T 2
S T 3
F S = first sc a n
ST 1 = ( ST 1 + T 1 ) ⋅ T 2 + FS
ST 2 = ( ST 2 + T 2 + T 3 ) ⋅ T 1 ⋅ T 4
ST 3 = ( ST 3 + T 4 ⋅ T 1 ) ⋅ T 3
T 2 = ST 1 ⋅ B
T 3 = ST 3 ⋅( C ⋅ B )
T 4 = ST 2 ⋅( C + B )
S T 2 A
S T 1 B
S T 3 C B
T 1
T 2
T 3
T 4
S T 2
C
B
S T 1
T 2
S T 1
T 1
first sc a n
S T 2
T 1
S T 2
T 2
T 3
S T 3
T 3
S T 3
T 4
T 4
T 1
Automating Manufacturing Systems
with PLCs
(Version 4.2, April 3, 2003)
Hugh Jack
page i
Copyright (c) 1993-2003 Hugh Jack ([email protected]).
Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free Documentation License".
This document is provided as-is with no warranty, implied or otherwise. There have been attempts to eliminate errors from this document, but there is no doubt that errors remain. As a result, the author does not assume any responsibility for errors and omissions, or damages resulting from the use of the information pro- vided.
Additional materials and updates for this work will be available at http://clay- more.engineer.gvsu.edu/~jackh/books.html
plc wiring - 1.
PREFACE
Some sections are still in point form. The last major task of this book will be to write the preface to reflect the book contents and all of the features.
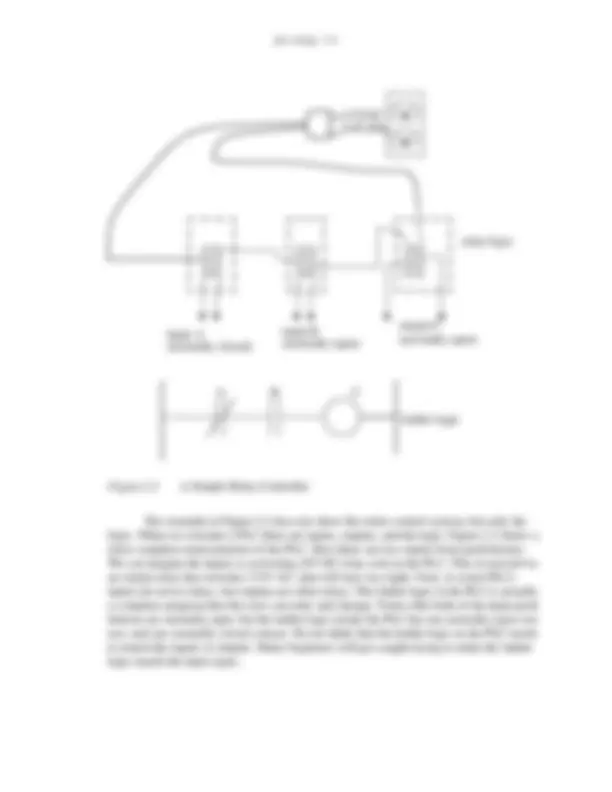
Control systems apply artificial means to change the behavior of a system. The type of control problem often determines the type of control system that can be used. Each controller will be designed to meet a specific objective. The major types of control are shown in Figure 1.1.
Figure 1.1 Control Dichotomy
- Continuous - The values to be controlled change smoothly. e.g. the speed of a car.
- Logical - The value to be controlled are easily described as on-off. e.g. the car motor is on-off. NOTE: all systems are continuous but they can be treated as logical for simplicity. e.g. “When I do this, that always happens!” For example, when the power is turned on, the press closes!
- Linear - Can be described with a simple differential equation. This is the pre- ferred starting point for simplicity, and a common approximation for real world problems. e.g. A car can be driving around a track and can pass same the same spot at a constant velocity. But, the longer the car runs, the mass decreases, and it travels faster, but requires less gas, etc. Basically, the math gets
CONTROL
CONTINUOUS DISCRETE
LINEAR NON_LINEAR CONDITIONAL SEQUENTIAL
e.g. PID
e.g. MRAC
e.g. FUZZY LOGIC
BOOLEAN
TEMPORAL
e.g. TIMERS
e.g. COUNTERS
EVENT BASED
EXPERT SYSTEMS
plc wiring - 1.
tougher, and the problem becomes non-linear. e.g. We are driving the perfect car with no friction, with no drag, and can predict how it will work perfectly.
- Non-Linear - Not Linear. This is how the world works and the mathematics become much more complex. e.g. As rocket approaches sun, gravity increases, so control must change.
- Sequential - A logical controller that will keep track of time and previous events.
The difference between these control systems can be emphasized by considering a simple elevator. An elevator is a car that travels between floors, stopping at precise heights. There are certain logical constraints used for safety and convenience. The points below emphasize different types of control problems in the elevator.
Logical:
- The elevator must move towards a floor when a button is pushed.
- The elevator must open a door when it is at a floor.
- It must have the door closed before it moves. etc. Linear:
- If the desired position changes to a new value, accelerate quickly towards the new position.
- As the elevator approaches the correct position, slow down. Non-linear: 1 Accelerate slowly to start.
- Decelerate as you approach the final position.
- Allow faster motion while moving.
- Compensate for cable stretch, and changing spring constant, etc.
Logical and sequential control is preferred for system design. These systems are more stable, and often lower cost. Most continuous systems can be controlled logically. But, some times we will encounter a system that must be controlled continuously. When this occurs the control system design becomes more demanding. When improperly con- trolled, continuous systems may be unstable and become dangerous.
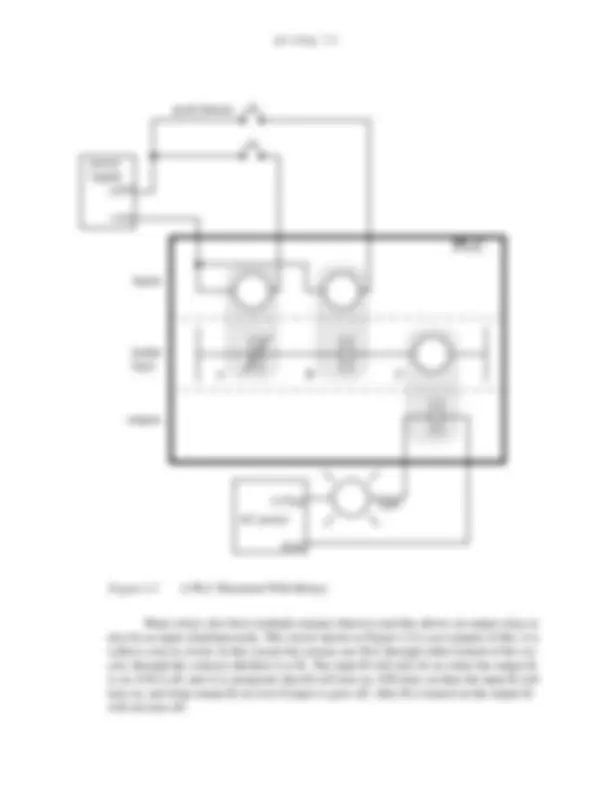
When a system is well behaved we say it is self regulating. These systems don’t need to be closely monitored, and we use open loop control. An open loop controller will set a desired position for a system, but no sensors are used to verify the position. When a system must be constantly monitored and the control output adjusted we say it is closed loop. A cruise control in a car is an excellent example. This will monitor the actual speed of a car, and adjust the speed to meet a set target speed.
Many control technologies are available for control. Early control systems relied upon mechanisms and electronics to build controlled. Most modern controllers use a com-
plc wiring - 1.
This book supports Allen Bradley micrologix, PLC-5s, SLC500 series
1.1 TODO LIST
- Finish writing chapters
- modify chapters
- add topic hierarchies to this chapter. split into basics, logic design tech- niques, new stuff, integration, professional design for curriculum design
- electrical wiring chapter
- fix wiring and other issues in the implementation chapter
- software chapter - improve P&ID section
- appendices - complete list of instruction data types in appendix
- all chapters
- grammar and spelling check
- add a resources web page with links
- links to software/hardware vendors, iec1131, etc.
- pictures of hardware and controls cabinet
plc wiring - 2.
2. PROGRAMMABLE LOGIC CONTROLLERS
2.1 INTRODUCTION
Control engineering has evolved over time. In the past humans were the main method for controlling a system. More recently electricity has been used for control and early electrical control was based on relays. These relays allow power to be switched on and off without a mechanical switch. It is common to use relays to make simple logical control decisions. The development of low cost computer has brought the most recent rev- olution, the Programmable Logic Controller (PLC). The advent of the PLC began in the 1970s, and has become the most common choice for manufacturing controls.
PLCs have been gaining popularity on the factory floor and will probably remain predominant for some time to come. Most of this is because of the advantages they offer.
- Cost effective for controlling complex systems.
- Flexible and can be reapplied to control other systems quickly and easily.
- Computational abilities allow more sophisticated control.
- Trouble shooting aids make programming easier and reduce downtime.
- Reliable components make these likely to operate for years before failure.
2.1.1 Ladder Logic
Ladder logic is the main programming method used for PLCs. As mentioned before, ladder logic has been developed to mimic relay logic. The decision to use the relay
Topics:
Objectives:
- Know general PLC issues
- To be able to write simple ladder logic programs
- Understand the operation of a PLC
- PLC History
- Ladder Logic and Relays
- PLC Programming
- PLC Operation
- An Example