Baixe Introdução a Robotica e outras Notas de estudo em PDF para Tecnologia Industrial, somente na Docsity!
CAPÍTULO 1
INTRODUÇÃO À ROBÓTICA.
Décadas atrás, os robôs faziam parte apenas da ficção científica, fruto da imaginação do homem. No início dos anos 60, os primeiros robôs começaram a ser usadas com o objetivo de substituir o homem em tarefas que ele não podia realizar por envolverem condições desagradáveis, tipicamente contendo altos níveis de: · calor; · ruído; · gases tóxicos (ambientes poluídos); · esforço físico extremo; · trabalhos monótonos, repetitivos e "chatos". Existem 2 tendências, nas últimas décadas, que garantem a evolução dos robôs:
- o constante aumento dos níveis salariais dos empregados (visão global);
- o extraordinário avanço tecnológico no ramo de computadores, eletrônica, controle e mecânica fina, que induz à redução dos preços do robô e uma significativa melhoria em seu desempenho. Há muitos anos, foi concebida a idéia de que sistemas mecânicos poderiam ser controlados por operações numérico-aritméticas. As máquinas-ferramentas CNC (Controle Numérico Computadorizado) são máquinas operadas, e suas velocidades são controladas por computadores conectados aos motores das máquinas.
CAPÍTULO 2
O QUE É UM ROBÔ?
Neste capítulo vamos estudar algumas definições e conceitos envolvidos com a operação de robôs. Os pontos abordados neste capítulo são: o braço mecânico, seus tipos de automação, uma classificação de robôs, as limitações de custo e implicações sociais.
O BRAÇO MECÂNICO.
O braço mecânico é um manipulador projetado para realizar diferentes tarefas e ser capaz de repeti-las. Para realizar determinadas tarefas, o robô move partes, objetos, ferramentas, e dispositivos especiais segundo movimentos e pontos pré-programados. Um robô consiste de um braço mecânico motorizado e um cérebro na forma de um computador que controla seus movimentos. O computador guarda em sua memória um programa que detalha o curso que o braço seguirá. Quando o programa está rodando, o computador envia sinais ativando motores que movem o braço e a carga no final dele, que é mantida sob controle pelo atuador (" end effector "). Dois aspectos importantes do funcionamento de um braço mecânico correspondem ao sensoriamento do ambiente e como se realiza a programação do mesmo.
SENSORIAMENTO
Para realizar certas tarefas os robôs precisam de habilidades sensoriais similares às do homem. Os modelos avançados de robôs estão equipados com sensores mas sua capacidade ainda é limitada, assim como sua capacidade de movimentação, já que os robôs ficam fixos em um local, ou tem um espaço restrito para se mover.
PROGRAMAÇÃO.
O computador que controla o robô deve possuir as seguintes características: · memória para guardar os programas; · conexões para os controladores dos motores; · conexões para entrada e saída de dados e para ativar os programas operacionais; · unidade de comunicação controlada por um humano.
HOMEM X ROBÔS
O robô tem claramente algumas vantagens sobre os humanos:
- não se cansa;
- não necessita de salário;
- pode manter uma qualidade uniforme na produção;
- não necessita de condições ambientais especiais, tais como ar condicionado, luz e silêncio. Em compensação, o robô tem: aprendizado, memória e movimentos limitados se comparado a um homem.
CAPÍTULO 3
O BRAÇO MECÂNICO
INTRODUÇÃO.
Neste capítulo estudaremos o braço mecânico do robô, seus tipos de juntas e graus de liberdade, seus tipos de articulações, sua área de trabalho (work envelope), e suas formas de acionamento. O braço do robô executa movimentos no espaço, transferindo objetos e ferramentas de um ponto para outro, instruído pelo controlador e informado sobre o ambiente por sensores. Na extremidade do braço existe um atuador usado pelo robô na execução de suas tarefas. Todo braço de robô é composto de uma série de vínculos e juntas, onde a junta conecta dois vínculos permitindo o movimento relativo entre eles, como mostrado na figura 1. Todo robô possui uma base fixa e o primeiro vínculo está preso a esta base. A mobilidade dos robôs depende do número de vínculos e articulações que o mesmo possui. FIGURA 1 - Junta e vínculos em um braço de robô
TIPOS DE JUNTAS.
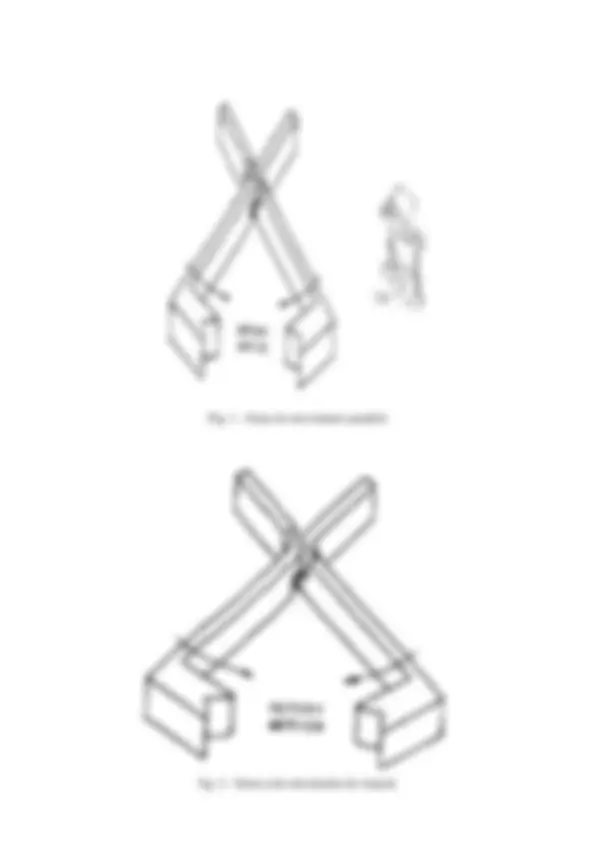
Os braços de robôs podem ser formados por três tipos de juntas: · juntas deslizantes; · juntas de rotação; · juntas de bola e encaixe. A maioria dos braços dos robôs são formadas pelas juntas deslizantes e de revolução, embora alguns incluam o de bola e encaixe. A seguir será descrito cada um destes tipos de juntas.
Juntas de Bola e Encaixe.
Esta conexão se comporta como uma combinação de três juntas de rotação, permitindo movimentos de rotação em torno dos três eixos, como mostrado na figura 4. FIGURA 4 - Junta de bola e encaixe Estas juntas são usadas em um pequeno número de robôs, devido à dificuldade de ativação. De qualquer maneira, para se ter a performance de uma junta bola e encaixe, muitos robôs incluem três juntas rotacionais separadas, cujos eixos de movimentação se cruzam em um ponto, como na figura 5.
FIGURA 5 - Três juntas rotacionais substituindo a junta de bola e encaixe
GRAUS DE LIBERDADE.
O número de articulações em um braço do robô é também referenciada como grau de liberdade. Quando o movimento relativo ocorre em um único eixo, a articulação têm um grau de liberdade. Quando o movimento é por mais de um eixo, a articulação têm dois graus de liberdade. A maioria dos robôs têm entre 4 a 6 graus de liberdade. Já o homem, do ombro té o pulso, têm 7 graus de liberdade.
CLASSIFICAÇÃO DOS ROBÔS PELO TIPO DE ARTICULAÇÃO.
É usual classificar os robôs de acordo com o tipo de junta, ou mais exatamente, pelas 3 juntas mais próximas da base do robô. Esta divisão em classes fornece informações sobre características dos robôs em várias categorias importantes:
- Espaço de trabalho.
- Grau de rigidez.
- Extensão de controle sobre o curso do movimento.
- Aplicações adequadas ou inadequadas para cada tipo de robô. Robôs podem ser classificados pelo tipo de juntas em cinco grupos:
- Cartesiano.
- Cilíndrico.
- Esférico.
- Articulação horizontal.
- Articulação vertical.
FIGURA 7 - Robô Cilíndrico A área de trabalho destes robôs são maiores que os robôs cartesianos, mas a rigidez mecânica é ligeiramente inferior. O controle é um pouco mais complicado que o modelo cartesiano, devido a vários momentos de inércia para diferentes pontos na área de trabalho e pela rotação da junta da base.
Robôs Esféricos.
Estes robôs possui duas juntas de revolução e uma deslizante, sendo codificado como RRP, como na figura 8. FIGURA 8 - Robô Esférico Estes robôs tem uma área de trabalho maior que os modelos cilíndricos, mas perde na rigidez mecânica. Seu controle é ainda mais complicado devido os movimentos de rotação.
Robôs com Articulação Horizontal.
Caracterizam-se por possuir duas juntas de revolução e uma deslizante, sendo codificados RRP, como na figura 9. FIGURA 9 - Robô com Articulação Horizontal A área de atuação deste tipo de robô é menor que no modelo esférico, sendo apropriados para operações de montagem, devido ao movimento linear vertical do terceiro eixo.
Robôs com Articulação Vertical.
Estes robôs caracterizam-se por possuir três juntas de revolução, sendo codificados por RRR, como na figura 10.
FIGURA 11 - Comparação da Área de Trabalho dos tipos de robôs
CONVENIÊNCIA PARA TAREFAS PARTICULARES.
A avaliação dos tipos de articulações e seu arranjo, permite ao projetista estimar a área de atuação do robô, rigidez mecânica e facilidade de controle do braço, possibilitando qual tarefa será mais apropriada para cada tipo de robô. O movimento das articulações capacitam o robô a mover seu atuador para qualquer ponto na sua área de atuação, mas não habilitando o controle da orientação do atuador no espaço; cuja importância não se restringe somente ao alcance da peça, mas também em conduzir o atuador a uma certa altitude em relação a peça. Essa tarefa pode ser realizada adicionando-se articulações para o pulso do braço, dando um maior grau de liberdade. A partir disso, o robô fica habilitado a realizar os seguintes movimentos: · Pitch - movimento para cima e para baixo. · Roll - movimento de rotação no sentido horário e anti-horário. · Yaw - movimento para a esquerda e para a direita.
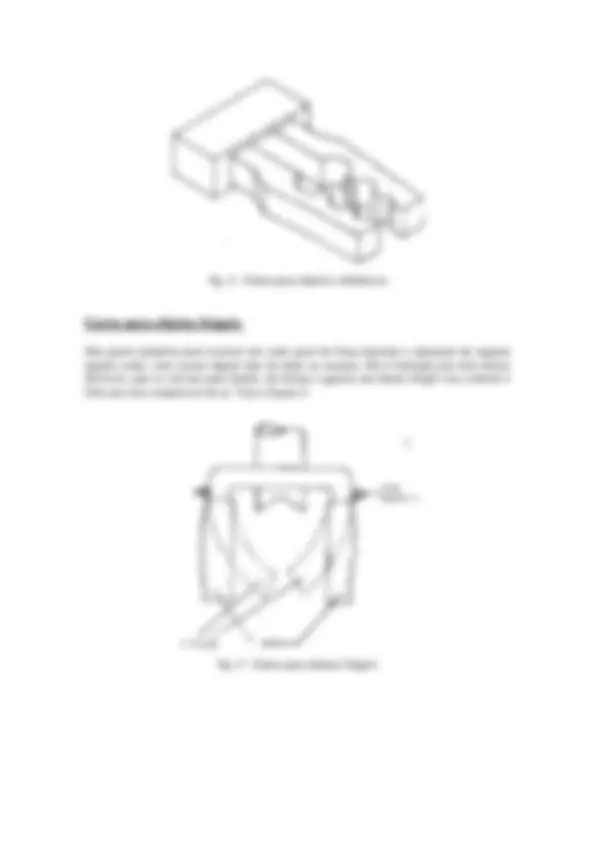
CONSTRUÇÃO DOS VÍNCULOS.
Um importante fator na construção dos vínculos é a carga que o mesmo suporta, o peso do próprio braço e o grau de rigidez do mesmo. Um braço pesado necessita de um motor maior, tornando o custo do robô mais elevado. Um braço de baixa rigidez reduz a precisão do robô devido às vibrações e resposta à tensão. Para aumentar a rigidez mecânica do braço sem aumentar seu peso, freqüentemente usa-se uma estrutura oca. A utilização deste tipo de estrutura tem uma melhor dureza quando comparada com uma construção maciça utilizando a mesma massa de material. Essa comparação é mostrada na figura 12. FIGURA 12 - Estruturas para a construção de vínculos
FIGURA 13 - Unidade de acionamento hidráulico O controle é feito através de válvulas que regulam a pressão do óleo nas duas partes do cilindro e que impulsionam o pistão. As vantagens do driver hidráulico:
- Momento alto e constante sob uma grande faixa de variação de velocidade.
- Precisão de operação (menor que o elétrico e maior que o pneumático). O óleo não é compressível e não há variação de seu volume quando se varia a pressão.
- Pode manter um alto momento para um longo período de tempo, quando parado. As desvantagens são:
- Requer uma fonte de energia cara.
- Requer uma manutenção cara e intensa.
- Requer válvulas de precisão caras.
- Está sujeito a vazamento de óleo. Driver pneumático Esta unidade é similar à hidráulica e é composto de: motores pneumáticos de movimento rotativo e cilindros pneumáticos de movimento deslizante. Na figura 13 pode-se considerar a mesma para acionamento pneumático, utilizando ar ao invés de óleo. Possui um alto grau de precisão nas paradas. São utilizados em sistemas automáticos simples, mas pouco utilizado em robôs devido à alta compressibilidade, o que reduz a habilidade de realizar controle preciso. É muito utilizado em movimentos de agarramento, tanto para abrir como para fechar as garras. As vantagens do driver pneumático:
- Podem operar em velocidades extremamente altas.
- Custo relativamente pequeno.
- Fácil manutenção.
- Podem manter um momento constante em uma grande faixa de velocidade.
- Pode manter alto o momento por longos períodos de tempo sem danos, quando parado. As desvantagens são:
- Não possui alta precisão.
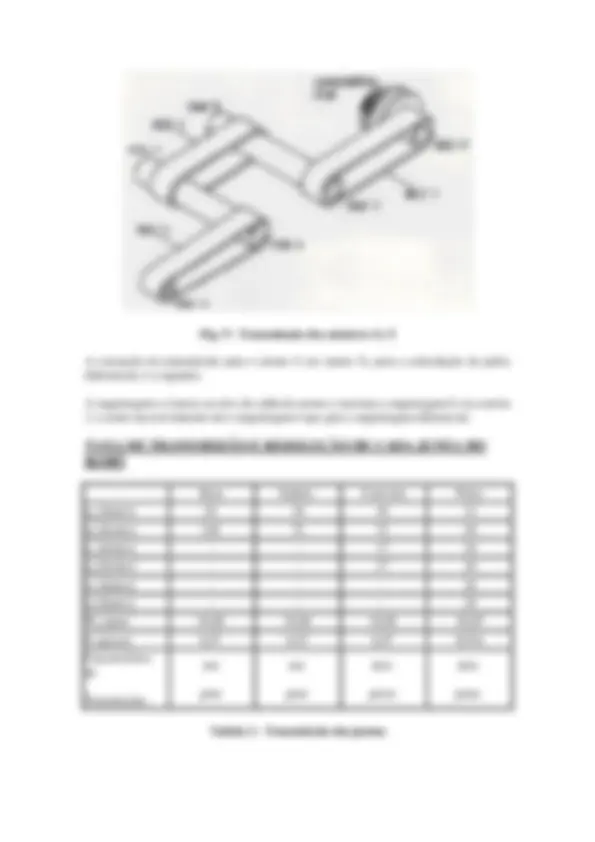
- Esta sujeito a vibrações quando o motor ou cilindro pneumático é parado. Resumindo, o driver elétrico é melhor em aplicações envolvendo: · Alta precisão de posição; · Transferência de carga de tamanho pequeno e médio; · Pequenas ambientes para sistemas de compressores de óleo e ar; O driver hidráulico trabalha melhor em situações envolvendo: · Transferência de cargas pesadas ( de 2.000 pounds ou mais); · De média para alta precisão na localização e velocidade; O driver pneumático é preferível em aplicações envolvendo: · Baixa precisão; · Necessidade de baixo custo; · Altas velocidades; · Transferências de pequenas e médias cargas. Classificação pela forma de conexão: Drivers Direto e Indireto. No caso do driver direto, o motor é montado diretamente na junta que ele irá mover. Se o motor é montado longe da junta, próximo da base, o driver é indireto; neste caso há elementos de transmissão como correntes, correias, diferenciais e engrenagens. As vantagens do driver indireto sobre o direto:
- Redução do peso do braço mecânico;
- Permite mudanças na velocidade de rotação das juntas. As desvantagens do driver indireto sobre o direto:
- Falta de precisão da operação da junta devido a liberdade mecânica dos pontos de conexão entre os dispositivos de transferência;
- Perdas consideráveis de potência.
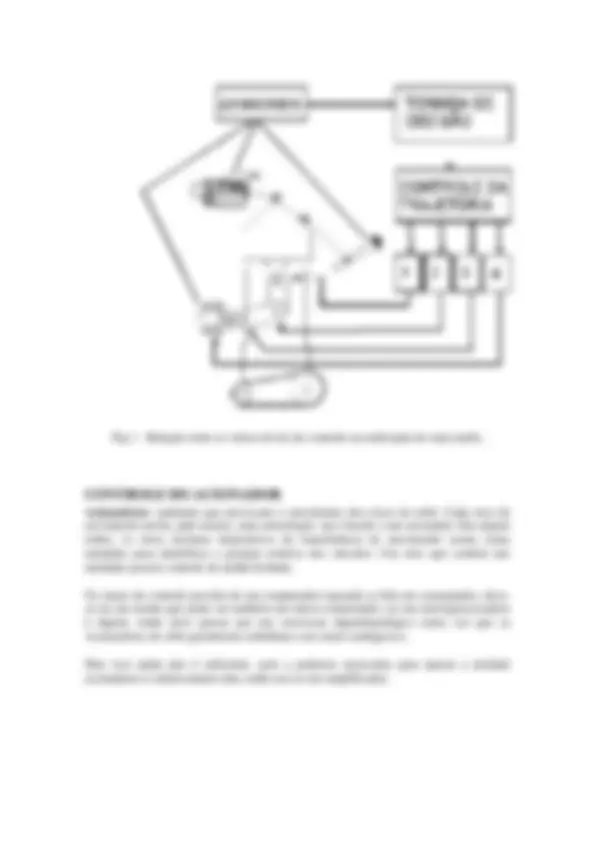
Fig 1 - Relação entre os vários níveis de controle na realização de uma tarefa.
CONTROLE DO ACIONADOR
Acionadores : unidades que provocam o movimento dos eixos do robô. Cada eixo de movimento inclui, pelo menos, uma articulação, um vínculo e um acionador. Em alguns robôs, os eixos incluem dispositivos de transferência de movimento assim como unidades para identificar a posição relativa dos vínculos. Um eixo que contém tais unidades possui controle de malha fechada. Os sinais de controle provém de um computador (quando se fala em computador, deve- se ter em mente que pode ser também um micro-controlador, ou um microprocessador) é digital, então deve passar por um conversor digital/analógico (uma vez que os Acionadores de robô geralmente trabalham com sinais analógicos). Mas isso ainda não é suficiente, pois a potência necessária para operar a unidade acionadores é relativamente alta, então usa-se um amplificador.
FIG. 2 - Sequência de acionamento de um motor elétrico com controle de malha fechada Para se entender o conceito de malha fechada é necessário recordar o de realimentação. Realimentação consiste em se tomar uma medida do estado atual do dispositivo a ser controlado e comparar essa medida com um valor pré-definido. Essa comparação vai resultar em um erro. O controlador vai tomar as providências necessária para que esse erro seja reduzido a zero. Um diagrama em blocos desse tipo de controle é mostrado na figura 3. FIG. 3 - Seqüência de acionamento de um motor elétrico. Em um controle de malha fechada, não se pode medir nem corrigir eventuais erros, então não se tem certeza se o objetivo foi atingido. Controle em malha fechada é utilizado em praticamente todos os robôs industriais existentes. Em um controle de malha fechada de um braço de robô, as unidades que informam sobre a posição atual dos vínculos é o encoder. Há um encoder presente em cada eixo a