


Mecânica Geral




















Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
MODELAGEM DE SISTEMAS CURSO SUPEIROR
Tipologia: Resumos
1 / 30

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Nesta unidade VI, temos por objetivo estudar as forças distribuídas com grandezas vetoriais, saber caracterizá-las e determinar suas resultantes, através do conceito de sistemas dinamicamente equivalentes. Além disso, deseja-se classificar os tipos de força, apresentar as características de um sistema de forças, com isso estudar sua aplicação no equilíbrio de um corpo sujeito a ação de forças distribuídas paralelas, assunto essencial da Estática, uma das subáreas da Mecânica.
Favor baixar a apostila da unidade, estudá-la e resolver os exercícios de aprofundamento e de sistematização para nota, a fim de verificar o aprendizado do conteúdo da teoria.
O estudo dos textos e materiais disponíveis na bibliografia também é muito importante para que se possa consolidar a compreensão dos conceitos.
Aconselhamos aos alunos que completem seus estudos por meio dos materiais complementares e os exercícios propostos para a realização da unidade.
Objetivo de Aprendizado
A unidade VI aborda o tema Forças Distribuídas, que é um assunto muito importante para a modelagem matemática de alguns fenômenos físicos envolvendo forças, que são intervenientes nos protótipos realizados pelas engenharias, e que faz parte da área de Mecânica Geral. Esta unidade já está disponível para o acesso. A data para a entrega de exercícios seguirá o mesmo tempo costumeiramente dado à resolução dos outros exercícios. O estudo das Forças Distribuídas divide-se em: propriedades das forças, seus tipos, as características de um sistema de forças, a teoria geral de forças paralelas e as resultantes de forças paralelas distribuídas. Esta unidade tem por objetivo apresentar os conceitos elementares referentes ás Forças Distribuídas que se baseia, principalmente, no princípio da transmissibilidade de forças e na resultante de forças paralelas distribuídas, os quais oferecem, de forma prática, procedimentos para a determinação de sistemas de força dinamicamente equivalentes, simplificando a modelagem matemática dos fenômenos físicos envolvidos na resolução de diversos problemas associados a forças distribuídas.
Como visto nas unidades anteriores, uma força é criada pela interação entre dois corpos. Quando dois corpos interagem, supõe-se que um dos corpos exerce a força e o outro resiste a ela. Por exemplo, a força do campo gravitacional atua sobre os corpos e a Terra, A hipótese adotada é de que a Terra exerce a força sobre o corpo e que este exerce a mesma força sobre a Terra.
A terceira lei de Newton afirma que para toda força (ação), há uma força oposta de mesma magnitude (reação). Considerar uma força sendo uma ação ou uma reação depende do ponto de vista.
Assim, toda força (ação) é acompanhada por uma força de mesma intensidade e oposta (reação).
A força de campo gravitacional geralmente é expressa em termos de uma característica, que é o peso do corpo.
Exemplo resolvido 1 – Força Peso
Qual o peso de um corpo (P) de massa (m) igual a 1 kg?
Dado: aceleração da gravidade g = 9,8 m/s^2.
Solução:
P = m g = 1 x 9,8 = 9,8 N (1)
Entretanto, como já visto, uma força tem como propriedades essenciais sua magnitude, linha de direção, sentido e em algumas situações o ponto de aplicação.
Como visto, as forças podem ser representadas por vetores, que são segmentos de reta orientados para representar forças. Assim, os vetores são abstrações matemáticas, criadas pelo matemático e inventor Simon Stevin (1548-1620), cujas grandezas que se somam como forças foram chamadas de vetores.
As forças da natureza são representadas matematicamente como sendo vetores, que são abstrações matemáticas representadas graficamente por hastes com setas em uma das extremidades.
1. Introdução 2. Tipos de Forças
U n i d a d e : F o r ç a s D i s t r i b u í d a s
P = 40 kN
Figura 1 – Exemplo de força concentrada.
q = 40 kN/m
L = 5,00m
Figura 2a – Exemplo de força distribuída pelo comprimento.
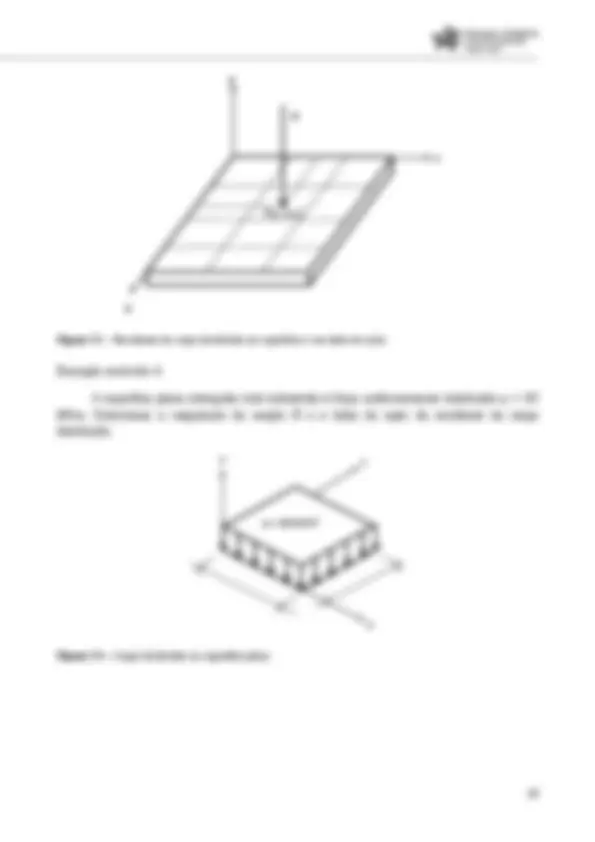
q = 40 kN/m^2
Figura 2b – Exemplo de força distribuída pela superfície.
U n i d a d e : F o r ç a s D i s t r i b u í d a s
F
F
F
Figura 4 – Exemplo de um sistema de forças colineares.
F F
F
X
Y
Figura 5a – Exemplo de sistema de forças coplanares concorrentes ou sistema de forças plano concorrentes.
F F
F
X
Y
Figura 5b – Exemplo de sistema de forças coplanares não concorrentes ou sistema de forças plano não concorrentes.
F F
F X
Y
Z
Figura 5c – Exemplo de sistema de forças não-coplanares ou sistema de forças tridimensionais.
Como visto nas outras unidades, corpo rígido é um corpo que não se deforma sob a ação de forças, isto é ele não muda de tamanho ou de forma quando forças são nele aplicadas. Um corpo rígido é uma idealização de um corpo real. Portanto, um corpo rígido não existe, pois todos os corpos deformam sob a ação de forças, mas seu conceito é útil para estudos físicos.
O Princípio da Transmissibilidade enuncia que o equilíbrio, ou o movimento, de um corpo rígido não é alterado se o ponto de aplicação de qualquer força que age no corpo for deslocado ao longo da linha de ação da força (figura 6).
F P
- F
F P
F Q
P
= (^) = F Q
Figura 6 – Exemplo do princípio da transmissibilidade.
Observação: o princípio da transmissibilidade não se aplica a um corpo para o qual as forças internas ou as deformações devem ser determinadas (figura 7).
4. Teoria Geral de Forças Paralelas
F F
- F
Y
Z
X
O
y
x
P (x, y)
Q (x, 0)
- F
F
Figura 9 - Exemplo do deslocamento lateral de uma força para o ponto O.
R = ∑ F (^) i (2)
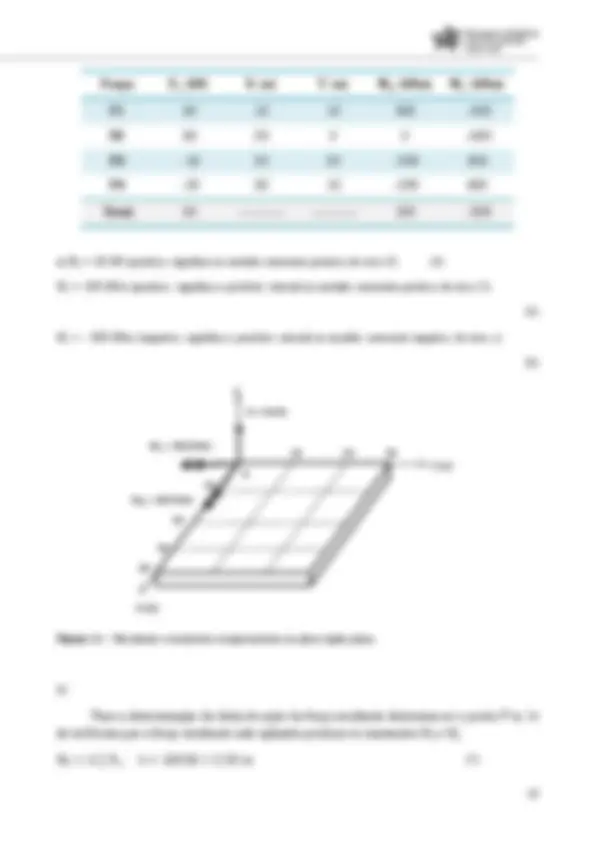
Se o ponto de transferência for o ponto O, origem do sistema cartesiano e as forças forem paralelas ao eixo z, além da força F na origem O, surgem dois momentos compensatórios M (^) x e M (^) y, que estão nos plano yz e xz respectivamente. Os momentos compensatórios são a somatória de todos os momentos de todas as forças originais em relação aos eixos x e y.
M (^) x = + ∑ yi F (^) i e M (^) y = - ∑ xi F (^) i (3)
U n i d a d e : F o r ç a s D i s t r i b u í d a s
Assim, se várias forças paralelas que atuam sobre um corpo rígido são paralelas ao eixo z, e se sua soma vetorial não é nula, as forças dadas são dinamicamente equivalentes a uma única força, desde que esta resultante esteja localizada de maneira que produza os mesmos momentos em relação aos eixos x e y que todas as forças originais. Desta maneira, esta força resultante estará sobre o eixo resultante do sistema de forças.
Exemplo resolvido 2
Para a placa rígida plana carregada com as forças paralelas não-coplanares, perpendiculares à superfície da placa (figura 10), determinar:
a) A força resultante equivalente no ponto O da origem do sistema cartesiano e os dois momentos compensatórios.
b) A posição da linha de ação da resultante que é dinamicamente equivalente às forças que agem sobre a placa dada.
Solução:
Para os momentos utilizar a regra da mão direita (positivo quando o produto vetorial, “o dedão da mão direita”, coincidir com o sentido crescente positivo dos eixos X ou Y).
F2 = 30 kN^ F3 = 10 kN
Y (m)
X (m)
F4 = 20 kN
F1 = 50 kN
Figura 10 - Placa rígida plana carregada com as forças paralelas não-coplanares.
U n i d a d e : F o r ç a s D i s t r i b u í d a s
MY = - a ∑ FZ ; a = - (-300/50) = 6,00 m (8)
Portanto, o eixo resultante é perpendicular ao plano da chapa e passa pelo ponto P (6, 2).
Para um corpo rígido submetido a forças que agem paralelamente ao eixo Z, elas podem ser expressas unicamente em termos de seu sentido e de sua magnitude. As equações para equilíbrio do corpo são:
∑ FZ = 0 (9)
∑MX =∑(+ yi Fi) = 0 (10)
∑MY = ∑(-y (^) i Fi) = 0 (11)
A resultante e a linha de ação de uma força distribuída em uma linha podem ser encontradas por analogia no centroide de uma área plana. O mesmo acontece para a resultante e a linha de ação de uma força distribuída sobre uma área plana, que podem ser encontradas por analogia no centroide de um volume.
Em algumas situações os efeitos de uma força distribuída podem ser determinados pela substituição desta pela sua resultante. No caso dos corpos rígidos, a resultante tem o mesmo efeito no equilíbrio que a força distribuída. No caso de corpos deformáveis, a força distribuída produz deformações diferentes daqueles que seriam produzidos pela força resultante.
Seja uma força distribuída q(x) agindo na barra retilínea AB. Considerando um elemento infinitesimal de comprimento dx da carga a uma distância x de A. A resultante da força distribuída é dada por:
= (^) ∫
L R q x dx 0
( ) (12)
5. Resultante de Forças Paralelas Distribuídas
Para determinar a linha de ação da força resultante R faz-se o momento da força distribuída em relação ao ponto A:
= (^) ∫
L M xq x dx 0
( ) (13)
O momento M é dinamicamente equivalente ao momento da resultante R em relação ao ponto A. Portanto, a linha de ação de R, localizada em X, é determinada pela expressão:
R
M X (^) CG = (14)
Y
A (^) X B
q(x) dx q(x)
A B
XCG R
X dX
Figura 12 – Forças distribuídas em um segmento de reta.
A resultante R, também, é chamada de carga concentrada equivalente. Assim, o módulo da resultante do carregamento é igual à área sob a curva da força distribuída, e a linha de ação da resultante passa pelo centroide da referida área. Exemplos:
Força equivalente: R = área do retângulo = q L (15)
Distância da linha de ação da força equivalente até o ponto A: X = L/2 (16)
Solução:
Através do princípio da superposição de esforços o sistema de forças original é substituído por um sistema de forças com uma força uniformemente distribuída na forma de um triângulo, com a maior força no ponto B de valor 60 kN/m, superposta a uma força uniformemente distribuída na forma de um retângulo de valor 20 kN/m.
Sistema de Forças Original
20 kN/m
6,00 m
A B
60 kN/m
6,00 m
A B
80 kN/m
Sistema de Forças Dinamicamente Equivalente
Figura 15 – Sistemas de força dinamicamente equivalentes por superposição.
O sistema de forças dinamicamente equivalente pode ser analisado separadamente e ser recomposto posteriormente.
20 kN/m
6,00 m
A (^) B
60 kN/m
Sistema de Forças Dinamicamente Equivalente
20 kN/m
6,00 m
A B
60 kN/m
6,00m
A B
Figura 16 – Sistemas de força dinamicamente equivalentes.
Fazendo a análise da força uniforme retangular:
120 kN
3,00m
A B
3,00m
20 kN/m
6,00 m
A B
Sistema de Forças Original Sistema de Forças Dinamicamente Equivalente
Figura 17 – Sistemas de força dinamicamente equivalentes – força distribuída retangular.
U n i d a d e : F o r ç a s D i s t r i b u í d a s
Fazendo a análise da força uniforme triangular:
A (^) B (^) =
Figura 18 – Sistemas de força dinamicamente equivalentes – força distribuída triangular.
Assim, o sistema de forças dinamicamente equivalente composto é:
120 kN
180 kN
4,00m
B
2,00m
A
3,00m
6,00m
3,00m
Figura 19 – Forças dinamicamente equivalentes ao sistema de força original.
a)
A magnitude da resultante é: R = 120 + 180 = 300 kN (19)
A linha de ação da resultante é:
m
x x R
M X (^) CG 3 , 60 300
= = (20)