¡Descarga Apuntes cinematica y más Apuntes en PDF de Física solo en Docsity!
PARTE I
MECÁNICA: FUNDAMENTOS
1. Cinemática de una partícula.
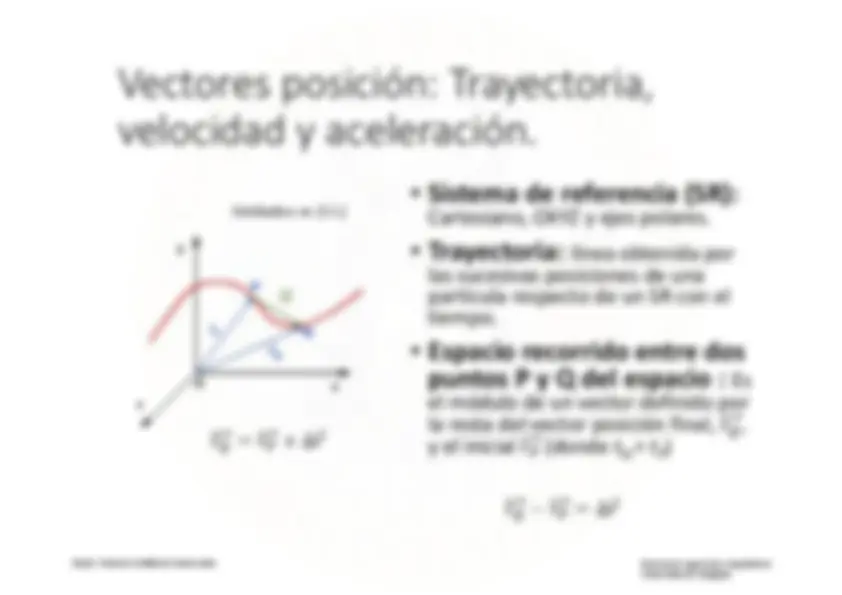
Vectores posición, velocidad y aceleración. Trayectoria.
Sistemas de referencia:coordenadas cartesianas, polares e intrínsecas.
Movimiento relativo.
Descripción movimiento de un cuerpo puntual sin importar las causas que lo producen: Geometría diferencial
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Sistemas de referencia:coordenadas cartesianas.
Sistema de coordenadas cartesianas.
Conjunto de tres ejes rectos y ortogonales, usadospara representación de puntos del espacio vectorial.
Cada eje es una línea recta caracterizada por unvector unitario (de módulo unidad) y el punto O.
Cada punto del espacio define un vector de posiciónde ese punto respecto del origen O del sistema dereferencia cartesiano.
Las coordenadas de un vector de posición son suproyección cada eje del sistema de referencia.
La proyección de un vector sobre otro se obtiene conel
Producto escalar
.
O
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Ejemplos: Vector posición.
Ej:
Una partícula describe en sutrayectoria el siguiente vector deposición en coordenadas cartesianas:
ݎԦ =
3 ݐ4 ,ݐ− 1,݁ି
௧
(m)
Obtén la ecuación de la trayectoria.
El vector desplazamiento entre elinstante inicial de tiempo t = 0 s y elinstante final de tiempo t = 2 s.
Divide el vector desplazamiento entre elinstante t
=2 s y el instante ti^
f^
= 2.0 + 10
s, intervalo de tiempo 10
s.
Ejs:
a)
= 2t rad
b)
= 3t
2
rad
Una partícula describe en sutrayectoria el siguiente vector deposición en coordenadascartesianas:
ݎԦ =
2 cos2 , ߮ sin߮ , 3
(m)
Obtén la ecuación de la trayectoria.
El vector desplazamiento entre elinstante inicial de tiempo t
i^
= 0 s y el
instante final de tiempo t
f^
= 2
ߨ
/
߱
s.
Divide el vector desplazamientoentre el instante t
= 2i
ߨ
/
߱
s y el
instante t
f^
= 2
ߨ
/
߱
s, intervalo
de tiempo, 10
s
c)
= t
3
rad
NOTA: los coeficientes numéricos tienen lasunidades adecuadas para que se satisfagandimensionalmente las ecuaciones.
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Velocidad:
Relación entre el vector desplazamiento
de una partícula y el tiempo empleado •
Velocidad.
Velocidad Media
ݒԦ Velocidad Instantánea.
ݒ ≡
Ԧ
=
ݎ∆
Ԧ ݐ∆
ݒԦ = lim
∆௧→
ݎ∆
Ԧ ݐ∆
݀=
݀Ԧ ݎ ݐ
Luego: el vector velocidad instantánea es
tangente
a la trayectoria
Unidades: m/s (S.I.)
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Aceleración:
Relación entre el vector que da el cambio
de la velocidad de una partícula y el tiempo empleado.
Aceleración.
Aceleración Media
Aceleración Instantánea
ܽԦ
Ԧ ܽ=
=
ݒ∆
Ԧ ܽݐ∆
Ԧ = lim
∆௧→
ݒ∆
Ԧ ݐ∆
݀=
݀Ԧ ݒ ݐ
݀≡
ଶ
ݎ݀Ԧ
ݐ
ଶ
Unidades: m/s
2
(S.I.)
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Ejemplos: Aceleración
Ej:
Una partícula describe en su trayectoria elsiguiente vector de posición en coordenadascartesianas :
ݎԦ =
3 ݐ4 ,ݐ− 1,݁ି
௧^
(m)
Obtén el vector aceleración instantánea enel instante t=2 s.
Obtén la aceleración media entre el instanteinicial de tiempo t = 0 s y el instante final detiempo t = 2 s.
Multiplica el vector cambio de velocidadentre el instante t
=2 s y el instante ti^
= 2.0+f^
10
s con el intervalo de tiempo 10
s.
Ej:
a)
߮
= 2t rad
b)
߮
=3t
2
rad
c)
߮
= t
3
rad
Una partícula describe en su trayectoria elsiguiente vector de posición en coordenadascartesianas :
ݎԦ =
2 cos2 , ߮ sin߮ , 3
(m)
Obtén el vector velocidad instantánea en elinstante t = 2 s.
Obtén la velocidad media entre el instanteinicial de tiempo t = 0 s y el instante final detiempo t = 2 s.
Multiplica el vector cambio de velocidadentre el instante t
= 2 s y el instante ti^
f^
= 2.0+
10
s con el intervalo de tiempo 10
s.
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Movimiento rectilíneo
௫
ݐ݀)t(
௧ ௧
ೕ
௫
௫
௧ ௧
݀
௧ ௧
ೕ
Ej: Movimiento rectilíneo
uniforme
ݒ
௫
t
ݒ =
௫
ݐ
^
ݐ∀
ݐ ݔ
ݐ ݔ −
ݒ =
௫
ݐ(
)( ݐ− ݐ
)
si
࢚࢞ࢇ
=
Ej: Movimiento rectilíneo
uniformemente
acelerado
,
ܽ
0,
o decelerado
, si
ܽ
< 0
ݒ
௫
t
ݒ =
௫
ݐ
^
ܽ+
(t − ݐ
^
)
ݐ ݔ
ݐ ݔ −
ݒ =
௫
ݐ
^
ݐ − ݐ
1 ܽ
ݐ
ଶ
ܽ−
ݐ
^
t −
1 ܽ
ݐ
ଶ
ܽ+
ݐ
ݐ
si
࢚࢞ࢇ
ࢇ =
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Ej: Movimiento no uniformemente acelerado
ܽ
௫
ݐ
݂=
݉ ݐ
ݏ/
2
ݒ
௫
t
ݒ =
௫
ݐ
݂න +
ݐ ݀ݐ
௧ ௧
ݒ =
௫
ݐ
− F ݐ
ܿ ,^
݂ ݊
ݐ
݀=
ܨ
݀ݐ
ݐ
ݐ ݔ
ݐ ݔ −
= න ݒ
௫
ݐ݀)t(
௧ ௧
ೕ
=
ݒ
௫
ݐ
^
− F ݐ
ݐ − ݐ
ݐ݀)ݐ(ܨ න +
௧ ௧
ೕ
ݐ ݔ
ݐ ݔ −
= න ݒ
௫
ݐ ݀t
௧ ௧
ೕ
=
ݒ
௫
ݐ
− F ݐ
^
ݐ − ݐ
ݐ ܩ +
ݐ ܩ −
ܿ,^
ܨ ݊
ݐ
݀=
ܩ
݀ݐ
ݐ
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Ej: Movimiento de caída de un cuerpo con fricción por viscosidad con el aire
௬
௬
es un valor constante y
es la gravedad.
Obtén
௬
, sabiendo que
௬
݀න
ݒ
݃௬
ݒ ݇−
௬
௩
(௧)
௩
(௧)
ݐ ݀න =
௧ ௧
ܿ,^
݀ ݊
݀ℱ ݒ
௬
=
݃
ݒ ݇−
௬
݈݃݊݇−
ݒ ݇−
௬
݃)ݐ(
ݒ ݇−
௬
)݅ݐ(
= ( ݐ− ݐ
^
݃)
ݒ ݇−
௬
݃)ݐ(
ݒ ݇−
௬
)݅ݐ(
ି݁=
(୲ି௧
)
௬
௬
௧ି௧
^
௬
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
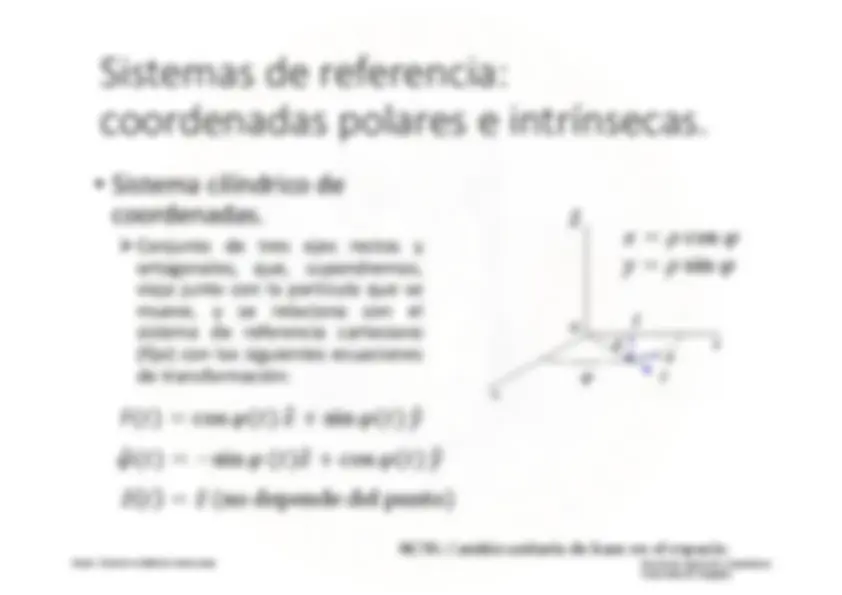
Sistemas de referencia:coordenadas polares e intrínsecas.
Sistema cilíndrico decoordenadas.
Conjunto
de
tres
ejes
rectos
y
ortogonales,
que,
supondremos,
viaja junto con la partícula que semueve,
y
se
relaciona
con
el
sistema
de
referencia
cartesiano
(fijo) con las siguientes ecuacionesde transformación:
O
ො^ ߮̂ݎ
ݎ̂(ݐ) = cos ݔ )ݐ( ߮ො + sin ݕ )ݐ( ߮ො߮ො(ݐ) = −sin ݔ)ݐ( ߮ො + cosݕ )ݐ( ߮ ො
߮cos ߩ = ݔ߮sin ߩ = ݕ
NOTA: Cambio unitario de base en el espacio.
߮
ߩ
̂ݖ
= ݖ̂ (no depende del punto)
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Velocidad instantánea de una partícula en coordenadaspolares
ௗ
Ԧ
ௗ௧
ௗ[ ௧ ̂ ୲ ]
ௗ௧
= ݎ̂ t
ௗ ௧
ௗ௧
ௗ̂ ୲
ௗ௧
ௗ̂ ୲
ௗ௧
ௗ ௗ௧
cos ݔ )ݐ( ߮ො + sinݕ )ݐ( ߮ ො
−sin ݔ ߮ො + cosݕ ߮ ො
ௗ(௧)
ௗ௧
, en rad/s
ݒԦ = ݎ̂ t
ௗ ௧
ௗ௧
ො = −sin ݔ ߮ො + cosݕ ߮ ොݒ
ݒ+ t ̂ݎ)ݐ(
ఝ
ఝ
Velocidad radial
Velocidad tangencial
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Aceleración instantánea de una partícula encoordenadas polares
ݒ+ t ̂ݎ)ݐ(
ఝ
݀t ොݐ
− sin ݔ )ݐ( ߮ො + cos ݕ )ݐ( ߮ො݀
cos ݔ ߮ො + sinݕ ߮ ො
ௗ௩
ക
௧
ௗ௧
ௗ ௧ ఠ ௧
ௗ௧
ௗ ௧
ௗ௧
ௗఠ ௧
ௗ௧
ݎ̂ = cos ݔ ߮ො + sin ݕ ߮ොܽ
= ݎ̂ t݀
݀t
ఝ
ఝ
ௗఠ(௧)
ௗ௧
, en rad/s
2
(aceleración angular)
ௗ௩
ക
௧
ௗ௧
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Ej: Para un movimiento circular,
(ݐ)ݎ̂ t
ఝ
ଶ
AceleraciónRadial = Centrípeta
ఝ
߱݀R =
߱R
Aceleracióntangencial
ఝ
߱R =
ௗఠ(௧)
ௗ௧
, en rad/s
2
Aceleración Angular
ௗ(௧)
ௗ௧
, en rad/s
Velocidad Angular
NOTA:
Son
también
llamadas
componentes
intrínsecas
de
la
aceleración
si
descomponemos del movimiento cualquiera de una partícula como una sucesión demovimientos circulares tangentes a la trayectoria y que preservan su curvatura
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza
Circunferencia Osculatriz
Radio,
, de la circunferencia Osculatriz
௧ୀ௧
ܽ
߱
ଶ
ఝ
Círculo osculador a una curva en un punto dado, P
i^
:
el centro de su circunferencia se encuentra sobre la rectanormal a la curva y tiene la misma curvatura que la curvadada en ese punto.
ݐ
ଵ
ݐ
ଶ
ݐ
ଷ
Trayectoria
ଶ
ଶ
ఝ
ܽଶ
ଶ
߱
ଶ
ଶ
ௗ ௗ௧
௧ୀ௧
ଶ
Escuela de Ingeniería y ArquitecturaUniversidad de Zaragoza