PROGRAMMAZIONE LINEARE
In economia capita spesso di dover distribuire delle risorse fra più
attività, in modo da ottenere il massimo profitto o il minimo costo.
E’ il caso dell’utilizzo nella produzione di più macchine con diverse
caratteristiche o di lavoratori con diverse specializzazioni oppure
diversi orari di lavoro. Di problemi di questa natura si occupa la
Ricerca Operativa (R.O.), che è un metodo scientifico specializzato
nel settore, e che cerca di risolverli utilizzando tecniche e metodi
matematici. Spesso, tali problemi sono di notevole complessità e
non possono essere trattati tutti in ambito scolastico. Alcuni però si
prestano a facili esemplificazioni e sono oggetto di studio di un
ramo molto importante della ricerca operativa, che va sotto il nome
di Programmazione lineare (P.L.).
Parliamo di programmazione lineare quando il problema
economico si traduce in un problema di scelta in condizioni di
certezza e con effetti immediati.
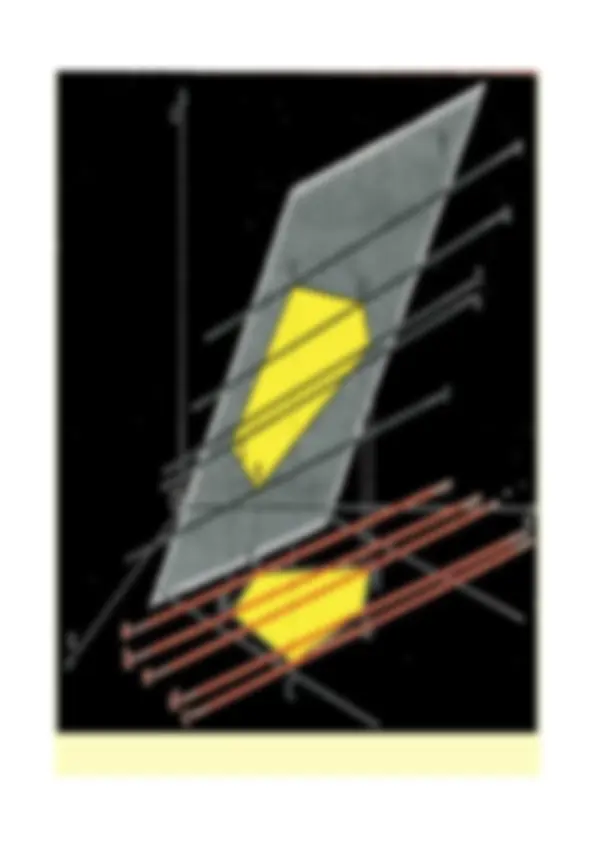
Il modello matematico della programmazione lineare è costituito
da:
1. Una funzione obiettivo lineare del tipo z=ax+by+c in due
variabili, della quale si vuole determinare il massimo o il minimo;
2. Un sistema di vincoli che possono essere:
a) tecnici (cioè vincoli dettati dalla struttura produttiva o da
esigenze economiche) espressi da equazioni o disequazioni lineari
nelle due variabili x ed y;
b) di segno che garantiscono la non negatività delle variabili
(ricordiamo che in questi problemi non ha senso parlare di
grandezze negative).
Per risolvere i problemi di programmazione lineare si utilizzano
vari metodi come: