



Amintas
Amintas
engenharia
engenharia





Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
aula 4.1 - aula 4.1
Tipologia: Notas de aula
1 / 22

Esta página não é visível na pré-visualização
Não perca as partes importantes!
AmintasAmintas
Unidade 4 – Vetores no Plano e no Espaço
Grandezas Escalares
Comprimento (mm, m, ...)
Forças físicas: Peso, normal, velocidade, aceleração, ...
Massa (g, Kg...)
Grandezas
Vetoriais
A = [ a 1 a 2 ... an ] ou A = [ a 1 a 2 ... an ] t
A
(Notação de Grassman)
vetor correspondente é representado por AB.
extremidade do vetor podemos representar o vetor com uma letra minúscula, v.
1.1 Soma de Ponto com Vetor
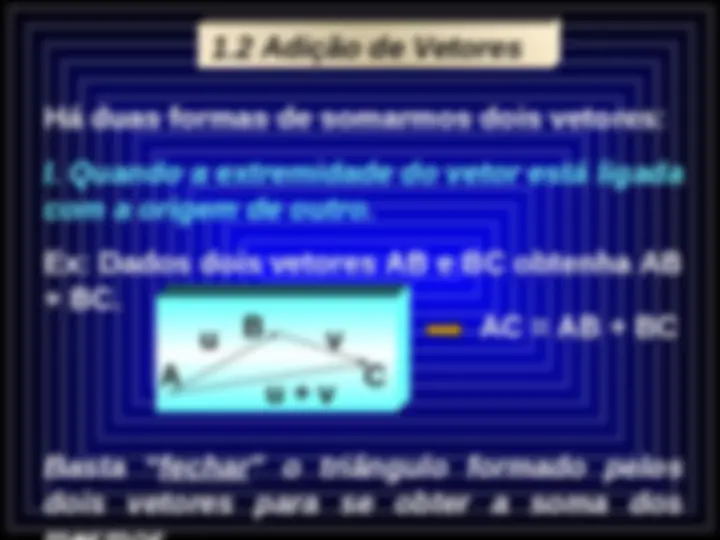
Há duas formas de somarmos dois vetores:
I. Quando a extremidade do vetor está ligada com a origem de outro.
Ex: Dados dois vetores AB e BC obtenha AB
Basta “fechar” o triângulo formado pelos dois vetores para se obter a soma dos
u v u + v
1.2 Adição de Vetores
I. O vetor resultante sempre “sai” da origem do sistema.
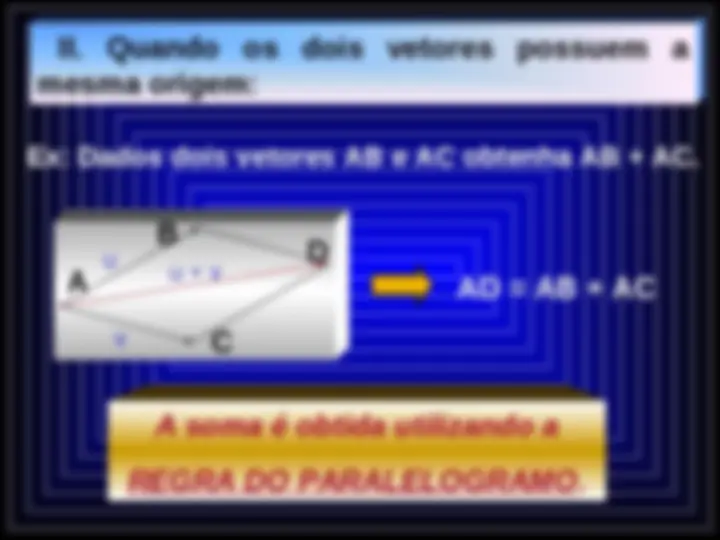
II. Quando os vetores não possuem as origens e as extremidades especificadas por letras, a soma dos vetores pode ser feita por qualquer um dos casos mostrados.
III. O vetor BA possui sentido oposto ao do vetor AB, pode-se também representar BA = -AB.
Se o interesse é aumentar ou diminuir um vetor, multiplicamos tal vetor por um número maior que 1 ou por um número entre 0 e 1, respectivamente.
Obs: Se multiplicarmos o vetor por um número negativo, o sentido do vetor é invertido.
Ex: (^) u 2u (^) -u ½ u
1.3 Multiplicação de um número real por um vetor.
1.5 Vetores Coplanares
São vetores presentes no mesmo plano. Observações Observações 2 vetores são sempre coplanares
3 vetores são sempre coplanares no R^2
4 vetores são sempre coplanares no R^3
n ( n Z) vetores são sempre coplanares no Rn - 1
Nº de vetores maior que a dimensão do espaço
Nº de vetores maior que a dimensão do espaço
Pelo menos um vetor é COMBINAÇÃO LINEAR dos outros vetores.
Pelo menos um vetor é COMBINAÇÃO LINEAR dos outros vetores.
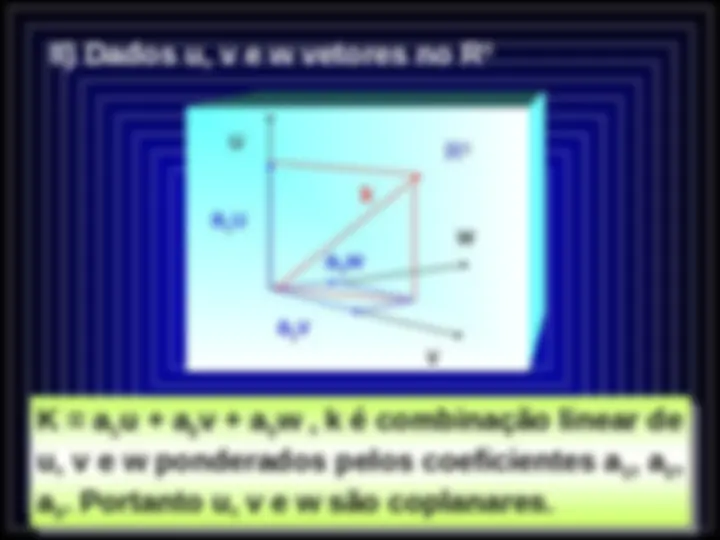
Vamos mostrar dois exemplos com relação a observação anterior: I) Dados u e v vetores no R^2
v
u w
Combinação linear nada mais é que a soma dos vetores ponderados por coeficientes.
w é combinação linear de u e v
w = u + v w = u + v
Um vetor v = (x 1 , y 1 ) é representado no plano
(R^2 ) conforme a figura abaixo.
x 1
y 1
x
y (x 1 , y 1 )
Basta marcar os pontos dados no plano e traçar o vetor v, partindo da origem do sistema.
1.6 Representação de um Vetor no Plano
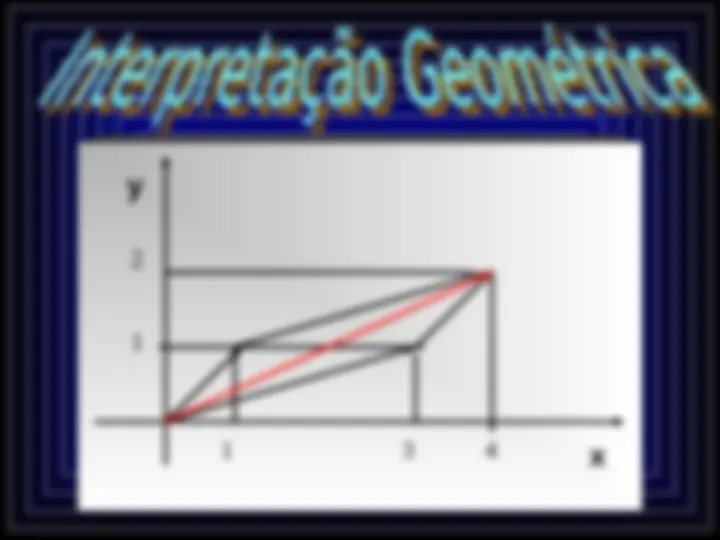
u + v = (1, 1) + (3, 1) =
Obs: Quando a origem do vetor não é indicada o ponto (0, 0) do plano é utilizado como ponto inicial.
1.6.1 Operações com Vetores no Plano 1.6.1 Operações com Vetores no Plano
Ex: Dados vetores u = (1, 1) e v = (3, 1) determine u + v.
Ex: Dados vetores u = (1, 1) e v = (3, 1) determine u + v.
A idéia é somar coordenada com coordenada, isto é, “x com x” e “y com y”.
Vetor u = (a, b) 2u = (2a, 2b),
½u = (½a, ½b) ½ a a 2a
2b
b ½ b x
y
Intuitivamente um vetor só depende do outro se esse “outro” existir.
Intuitivamente um vetor só depende do outro se esse “outro” existir.
Dados 3 vetores u, v e w dizemos que estes vetores são L.D se u = a 1 v + a 2 w, caso
não exista a 1 e a 2 os vetores são L.I.
Geometricamente vetores colineares (ou paralelos) são linearmente dependentes (L.D.), caso contrário são L.I.
Algebricamente vetores colineares são múltiplos , ou seja,
Caso o vetor u = kv dizemos que u e v são L.D, caso contrário são L.I.