¡Descarga Solido-Rígido y más Apuntes en PDF de Física solo en Docsity!
TEMA 5
Sólido rígido
1.- Movimiento general del sólido rígido
2.- Segunda ley de Newton en el movimiento de los
sólidos rígidos
3.- Energía cinética y trabajo en la rotación.
Conservación de la energía
4.- Movimiento de rodadura
5.- Giróscopos
FÍSICA I
1.- Movimiento general del sólido rígido
1.1.- Definición de sólido rígido
1.2.- Movimiento general del sólido rígido: trasla-
ciones y rotaciones
FÍSICA I
● Movimiento de traslación , todas las partículas tienen la misma velocidad lineal, por lo que describen trayectorias paralelas, de modo que el sólido siempre estará paralelo respecto a su posición inicial.
● Movimiento de rotación alrededor de un eje, cuando todas sus partículas describen circunferencias alrededor de dicho eje y por tanto tienen la misma velocidad angular
1.2.- Movimiento general del sólido rígido: traslaciones y
rotaciones
Existen dos tipos sencillos de movimiento en el sólido rígido:
FÍSICA I
El movimiento más general va a ser la combinación de un movimiento de traslación y uno de rotación
En una noria la rueda
tiene movimiento de
rotación y las
cabinas lo tienen de
traslación
Movimiento general ≡ movimiento de traslación + movimiento de rotación
La descripción
no tiene por
que ser única
FÍSICA I
2.- Segunda ley de Newton en el movimiento de
los sólidos rígidos
2.1.- Análisis de fuerzas. Momento de las fuerzas
2.2.- Momento angular de un sólido rígido. Momento
de inercia
- Cálculos de momentos de inercia
- Teorema de Steiner
- Radio de giro
- Ejes principales de inercia
2.3.-Dinámica del sólido rígido. Principio de
conservación del momento angular
FÍSICA I
Como hemos hecho hasta ahora, necesitamos analizar los agentes que van a dan lugar al movimiento de los cuerpos (causas), para ver así el efecto sobre dichos cuerpos. Como sabemos, las causas son las fuerzas actuando sobre los cuerpos. Consideremos un sólido rígido y una situación donde tengamos varias fuerzas aplicadas (en general, sobre diferentes puntos del sólido rígido).
Podríamos hacer un análisis de cada fuerza y del efecto sobre el sólido rígido. Pero nos interesa más hacer (sobre todo por sencillez) un análisis global. ¿Podríamos considerar un vector fuerza resultante que nos describa de la misma forma el movimiento del sólido rígido en cuestión?
Podemos pensar en el vector suma de los vectores individuales. Sin embargo, la operación suma no está definida para vectores que no podamos trasladar todos a un mismo punto. Y los vectores fuerza que estamos considerando no se pueden cambiar de punto de aplicación sin que varíen sus efectos.
2.1.- Análisis de fuerzas. Momentos de las fuerzas
FÍSICA I
Sólo si las rectas de acción se cortasen todas en un mismo punto (concurrentes), podríamos considerar la suma de los vectores fuerza. Pero por lo general esto no ocurre.
Así, las fuerzas aplicadas a los sólidos rígidos no pueden cambiar su punto de aplicación fuera de su recta de acción sin que varíen sus efectos sobre los mismos, ya que matemáticamente son vectores de tipo deslizante.
Es preciso pues encontrar un procedimiento para poder desplazar este tipo de vectores sin que se alteren su efectos sobre los sólidos.
FÍSICA I
Supongamos que queremos desplazar una fuerza aplicada en A al punto O:
Por ejemplo, si queremos hacer la traslación al C.M. de cada una de las fuerzas externas tendremos que introducir adicionalmente un momento de un par por cada fuerza. (La traslación puede ser al C.M. o a cualquier otro punto)
- Se puede sumar y restar el vector F (vectores iguales y opuestos) en O
- Los tres vectores se podrán reemplazar por el vector fuerza equivalente y el vector par sin que cambien los efectos
El efecto de cambiar la fuerza de punto de aplicación supone introducir adicionalmente un momento de un par
Sistema Fuerza-Par
FÍSICA I
Caso de la fuerza peso_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _______
El mismo análisis que hemos efectuado hasta ahora debemos hacerlo con la fuerza peso, actuando sobre cada una de las partículas de nuestro sólido. En este caso es posible demostrar que el efecto es equivalente a trasladar toda la masa (peso) del sistema a un punto común, denominado centro de gravedad, que en el caso de cuerpos de pequeñas dimensiones coincide con el C.M.
→
=
→ → = (^) ∑ i
N
i 1
MC.M. ri'x w
En efecto, consideremos un cuerpo sometido a su propio peso. Si trasladamos las fuerzas sobre cada partícula al C.M. tendremos que introducir los momentos correspondientes, cuya suma total será
El efecto de la gravedad (peso) sobre cada partícula nos da una fuerza:
→
→
→ →
→ →
→ → →
M = r'xw r'x m g m r'x g m r' x g
N i 1 i i
N i 1 i i
N i 1 i i
N i 1 i i
C.M.
→ → = =
→
→ → =
W = (^) ∑w = ∑m g = ∑m g mg
N i 1 i
N i 1 i
N i 1 i
→ → w (^) i = mi. g
= m →g i
FÍSICA I
Por lo que habíamos visto al considerar el C.M.:
m r' 0
N i 1 i^ i
=
→
M C.M. = 0
→
Por lo tanto, en el caso del peso, al trasladar todos los vectores al C.M., el momento que resulta es nulo, por lo que el sistema fuerza-par equivalente se reduce a considerar únicamente la resultante de las fuerzas (el peso total) aplicada en dicho punto.
→ = mg
FÍSICA I
- En el C.M. debemos considerar siempre la resultante de las fuerzas
- Podemos considerar las rotaciones en torno al punto O
Para ver los giros en el sistema, no necesariamente debemos pensar siempre en el giro respecto al C.M. En muchas ocasiones analizaremos los giros (momentos) respecto a otros puntos del S.R. En ese caso, lo que debemos hacer es calcular el momento de las fuerzas resultante en dicho punto.
Rx
mg
C.M.
Ry
mg
C.M.
mg
mg
R^ C.M.
x
Ry Fuerzas (traslaciones)
Momentos (rotaciones)
O
O
► Ejemplo:
FÍSICA I
En todo caso, siempre es posible seguir escribiendo el movimiento genérico como:
C.M. O
C.M.
Movimiento sólido rígido ≡ movimiento del C.M. (traslación) + movimiento de rotación en torno al C.M. (rotación)
FÍSICA I
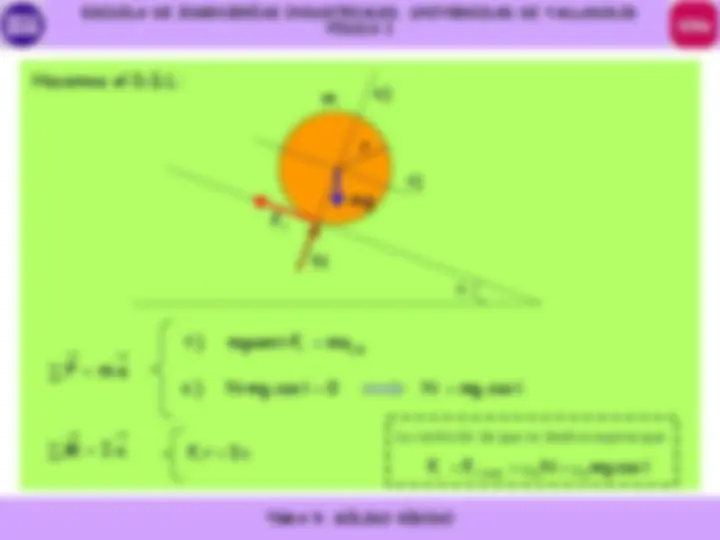
Cuestión 5.
¿Cuál será la cantidad de movimiento de un disco
homogéneo de masa M y radio R que gira en torno a su eje
con velocidad angular ω? Justificar la respuesta.
FÍSICA I
— Consideremos una única partícula que gira en torno a un eje
Como ya sabemos, se puede definir una velocidad angular que describa este giro.
eje de giro
→ r
→ v
→ ω m
— Consideremos ahora una placa con un espesor muy pequeño (despreciable) que gira en torno a un eje perpendicular que pasa por su centro y evaluemos L.
Necesitamos evaluar el momento angular del sólido rígido, girando en torno a un eje. Más en concreto. →^ • L
1.2.- Momento angular de un sólido rígido. Momentos de
inercia
L tiene la dirección y sentido de ω
L r x mv r x m( xr )
→ → → → → → = = ω
→ → L = mr^2 ω
FÍSICA I