



Controladores Programáveis
Marcos Daniel Zancan
2011
Santa Maria - RS












































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Controladores programáveis
Tipologia: Notas de estudo
1 / 54

Esta página não é visível na pré-visualização
Não perca as partes importantes!
RIO GRANDEDO SUL
INSTITUTOFEDERAL
Presidência da República Federativa do Brasil Ministério da Educação Secretaria de Educação a Distância
Comissão de Acompanhamento e Validação Colégio Técnico Industrial de Santa Maria/CTISM Coordenador Institucional Paulo Roberto Colusso/CTISM Professor-autor Marcos Daniel Zancan/CTISM Coordenação Técnica Iza Neuza Teixeira Bohrer/CTISM Coordenação de Design Erika Goellner/CTISM
Revisão Pedagógica Andressa Rosemárie de Menezes Costa/CTISM Francine Netto Martins Tadielo/CTISM Marcia Migliore Freo/CTISM Revisão Textual Lourdes Maria Grotto de Moura/CTISM Vera da Silva Oliveira/CTISM Revisão Técnica Eduardo Lehnhart Vargas/CTISM Diagramação e Ilustração Gustavo Schwendler/CTISM Leandro Felipe Aguilar Freitas/CTISM Marcel Santos Jacques/CTISM Máuren Fernandes Massia/CTISM Rafael Cavalli Viapiana/CTISM Ricardo Antunes Machado/CTISM
Ficha catalográfica elaborada por Denise Barbosa dos Santos – CRB 10/ Biblioteca Central – UFSM
© Colégio Técnico Industrial de Santa Maria Este Material Didático foi elaborado pelo Colégio Técnico Industrial de Santa Maria para o Sistema Escola Técnica Aberta do Brasil – e-Tec Brasil.
Z27c Zancan, Marcos Daniel. Controladores programáveis / Marcos Daniel Zancan. – 3. ed. – Santa Maria : Universidade Federal de Santa Maria : Colégio Técnico Industrial de Santa Maria, 2010. 54 p.: il.
**1. Automação industrial. 2. Controlador programável.
Indicação de ícones
Os ícones são elementos gráficos utilizados para ampliar as formas de linguagem e facilitar a organização e a leitura hipertextual.
Atenção : indica pontos de maior relevância no texto.
Saiba mais : oferece novas informações que enriquecem o assunto ou “curiosidades” e notícias recentes relacionadas ao tema estudado.
Glossário : indica a definição de um termo, palavra ou expressão utilizada no texto.
Mídias integradas : sempre que se desejar que os estudantes desenvolvam atividades empregando diferentes mídias: vídeos, filmes, jornais, ambiente AVEA e outras.
Atividades de aprendizagem : apresenta atividades em diferentes níveis de aprendizagem para que o estudante possa realizá-las e conferir o seu domínio do tema estudado.
Apresentação da disciplina
A automação é uma das mais inovadoras conquistas do ser humano. Desde os primórdios, o homem utiliza a energia química dos alimentos para a manutenção de suas funções vitais, bem como na realização de trabalho através de seus músculos. Em busca da sobrevivência, o homem evoluiu, e foi descobrindo outras formas de energia disponíveis no planeta, utilizando-as em seu benefício, atendendo assim às suas necessidades.
Estas novas modalidades energéticas permitiram a mecanização de diversas atividades, reduzindo drasticamente o trabalho braçal do ser humano, exi- gindo, porém, atividades de gerenciamento e controle, muitas vezes extre- mamente monótonas e repetitivas.
Dessa forma, com o desenvolvimento da automação, o ser humano liber- tou-se do controle de tarefas repetitivas, passando a gerenciar e planejar atividades mais complexas, proporcionais à capacidade cognitiva do cérebro humano.
Neste contexto, os controladores programáveis constituem-se como ferra- mentas de fundamental importância na automação de processos industriais, sendo amplamente utilizados no controle de processos, independentemente de sua complexidade.
e-Tec Brasil
Disciplina : Controladores Programáveis (carga horária: 90h).
Ementa : Noções básicas de controladores programáveis, variáveis de entrada e saída, dispositivos de entrada e saída para CLP, instalação e programação e projetos com controladores programáveis.
AULA (^) APRENDIZAGEMOBJETIVOS DE MATERIAIS
CARGA HORÁRIA (horas)
Reconhecer, através do histórico e evolução dos Controladores Lógicos Programáveis (CLP), suas aplicações e vantagens. Compreender o princípio básico de funcionamento de um CLP, identificando sua estrutura interna.
Ambiente virtual. Apostila didática. Recursos de apoio: links , exercícios, textos complementares, videoconferência.
10
Reconhecer variáveis digitais e variáveis analógicas. Diferenciar as entradas e saídas digitais e analógicas de um CLP. Identificar os módulos de entrada e saídas digitais e analógicas de um CLP.
Ambiente virtual. Apostila didática. Recursos de apoio: links , exercícios, textos complementares, videoconferência.
10
Identificar e diferenciar os dispositivos para entradas e saídas analógicas e digitais de CLP. Relacionar os diferentes dispositivos de entrada/saída às diferentes estratégias de controle.
Ambiente virtual. Apostila didática. Recursos de apoio: links , exercícios, textos complementares, videoconferência.
10
Compreender as características de instalação de CLP, utilizando diferentes dispositivos para entradas e saídas. Reconhecer diferentes estruturas de linguagem para programação de CLP. Diferenciar funções básicas, combina- das e especiais da linguagem Ladder , compreendendo sua estrutura de funcionamento.
Ambiente virtual. Apostila didática. Recursos de apoio: links , exercícios, textos complementares, videoconferência.
20
Aplicar os conhecimentos de controlado- res programáveis e linguagem de progra- mação Ladder na solução de problemas de automação industrial. Desenvolver projetos práticos de automação industrial com controladores programáveis, definindo dispositivos de entrada e saída e simulando o funciona- mento do programa em Ladder.
Ambiente virtual. Apostila didática. Recursos de apoio: links , exercícios, textos complementares, videoconferência.
40
Projeto instrucional
Desta forma, em 1968, a General Motors desenvolveu o primeiro CLP, com grande versatilidade de programação e fácil utilização, o qual vem sendo aperfeiçoado constantemente, a fim de atender suas diversas aplicações atuais em automação de processos.
1.2 Definição De acordo com a Associação Brasileira de Normas Técnicas (ABNT), o CLP é um equipamento eletrônico digital, com hardware e software compatível com as aplicações industriais.
De acordo com Associação Nacional de Fabricantes de Equipamentos Elé- tricos dos Estados Unidos da América ( National Electrical Manufacturers Association – NEMA), o CLP é um aparelho eletrônico digital, que utiliza uma memória programável para armazenar internamente instruções e para implementar funções específicas, tais como lógica, sequenciamento, tem- porização, contagem e aritmética, controlando, por meio de módulos de entradas e saídas, vários tipos de máquinas ou processos.
1.3 Evolução A evolução dos Controladores Programáveis pode ser dividida em cinco gerações.
Na 1ª geração, a programação era feita em Assembly , exigindo do progra- mador o conhecimento completo do hardware do equipamento, isto é, de seus componentes eletrônicos.
Na 2ª geração, surgiram as linguagens de nível médio, com programas para converter em linguagem de máquina o programa desenvolvido pelo usuário.
Na 3ª geração, os CLPs apresentavam entradas de programação, permitindo sua conexão a teclados ou programadores portáteis.
Na 4ª geração, os CLPs apresentavam entrada para comunicação serial, pos- sibilitando sua programação diretamente de um computador. O software de programação instalado no computador permitia, além da programação e transferência do programa ao CLP, testar o funcionamento do programa.
Os CLPs de 5ª geração apresentam padrões de protocolos de comunicação, facilitando a interface com outros equipamentos e também com sistemas supervisórios.
1.4 Aplicações e vantagens A redução do custo dos CLPs associada à diversidade de fabricantes, modelos e funções programáveis torna-os aplicáveis na automação industrial, comer- cial e residencial, controlando processos de micro a grande porte, desde o controle do sistema de alarme de uma residência até o controle do processo de soldagem robotizado nas linhas de produção de automóveis.
As principais vantagens dos CLPs em relação aos painéis eletromecânicos são:
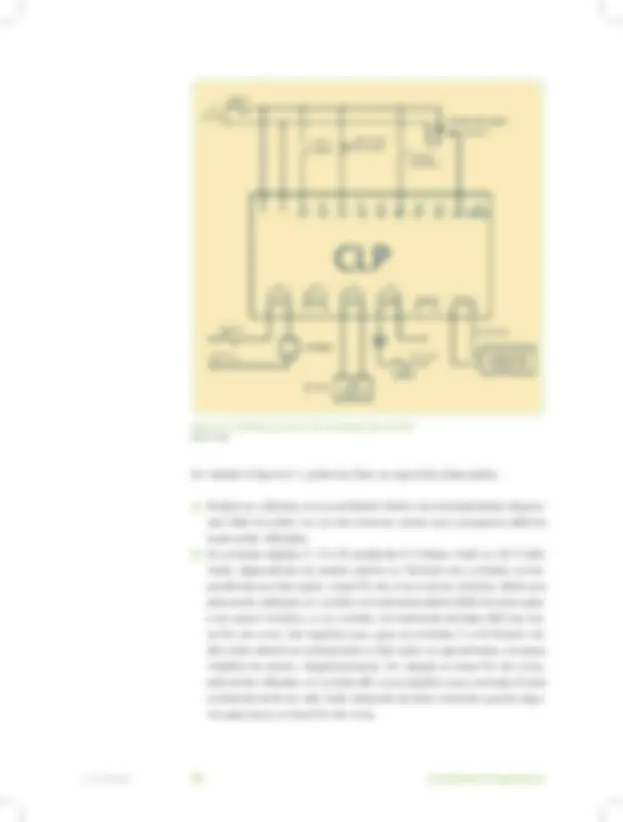
1.5 Funcionamento Para entendermos o funcionamento básico de um CLP, podemos dividí-lo em três partes básicas: entradas, unidade central de processamento e saídas, conforme mostra a Figura 1.1.
Figura 1.1: Estrutura básica de um CLP Fonte: CTISM
Pesquise mais sobre sistemas supervisórios, acessando: http://www.centralmat.com. br/artigos/mais/oquesao sistemassupervisorios.pdf
1.5.2 Verifica o estado das entradas O CLP faz a leitura do estado de cada uma das entradas, verificando se alguma foi acionada. Este procedimento dura alguns micro segundos.
1.5.3 Transfere os dados para a memória Após realizar a leitura do estado das entradas, o CLP armazena as informa- ções obtidas em uma memória chamada “memória imagem das entradas e saídas”. Esta memória será consultada pelo CLP durante o processamento do programa do usuário.
1.5.4 Compara com o programa do usuário Ao executar o programa do usuário, o CLP consulta a memória imagem das entradas, atualizando a memória imagem das saídas, de acordo com as instruções do programa do usuário.
1.5.5 Atualiza as saídas Após atualizar a memória imagem das saídas, o CLP atualiza as interfaces ou módulos de saída, iniciando então um novo ciclo de varredura.
1.6 Estrutura interna de um CLP O CLP é um dispositivo microprocessado, constituído por um microprocessa- dor ou um microcontrolador, um programa monitor, uma memória de pro- grama, uma memória de dados, uma ou mais interfaces de entrada, uma ou mais interfaces de saída e circuitos auxiliares, conforme mostra a Figura 1.3.
Figura 1.3: Estrutura interna de um CLP Fonte: CTISM
A diferença básica entre microprocessador e microcontrolador é que o microprocessador consiste no elemento central de processamento, necessitando, para seu funcionamento, componentes adicionais, tais como memórias. Já o microcontrolador possui todas estas funcionalidades integradas num único chip.
1.6.1 Fonte de alimentação A fonte de alimentação de um CLP tem por finalidade converter a tensão de alimentação (110 a 220 Vca) para a tensão de alimentação dos circuitos eletrônicos (5 Vcc para o microprocessador, memórias e circuitos auxiliares e 12 Vcc para comunicação com o programador ou computador), bem como manter a carga da bateria e fornecer tensão para alimentação das entradas e saídas (12 ou 24 Vcc).
1.6.2 Unidade de processamento A CPU é responsável pelo funcionamento lógico de todos os circuitos. Em CLP modulares, a CPU geralmente está contida em apenas uma placa sepa- rada das demais. Já em CLP de menor porte, a CPU e os demais circuitos geralmente estão contidos numa mesma placa.
1.6.3 Bateria A bateria utilizada em CLP tem por finalidade manter a alimentação do cir- cuito do relógio de tempo real e manter parâmetros ou programas (quando utilizar memória do tipo RAM), mesmo em falta de energia elétrica.
1.6.4 Memória do programa monitor O programa monitor é responsável pelo funcionamento geral do CLP, geren- ciando todas as atividades do CLP. Este programa não pode ser alterado pelo usuário, sendo armazenado em memórias do tipo PROM, EPROM ou EEPROM, e funciona de forma semelhante ao sistema operacional dos computadores.
1.6.5 Memória do usuário Nesta memória é armazenado o programa desenvolvido pelo usuário, o qual pode ser alterado, tornando flexível a programação. Este programa geralmente é armazenado em memórias do tipo RAM, EPROM, EEPROM E FLASH-EPROM, cuja capacidade varia de acordo com a marca e o modelo de CLP.
1.6.6 Memória de dados Tem por finalidade armazenar os dados do programa do usuário, tais como valores de temporizadores, contadores, senhas, etc. Geralmente, a memória de dados utiliza partes da memória RAM do CLP.
1.6.7 Memória imagem das entradas e saídas Esta memória armazena informações dos estados das entradas e saídas do CLP, funcionando como uma tabela onde a CPU buscará informações durante o processamento do programa de usuário.
Pesquise mais sobre os diferentes tipos de memórias, acessando: http://pt.wikipedia.org/wiki/ mem%c3%b3ria_(computador)