Baixe Transformada inversa de Laplace. e outras Notas de estudo em PDF para Eletrônica, somente na Docsity!
Professor: Cleiton Patrick Ribeiro 2S/
TEORIA DE CONTROLE MODERNO – UNIDADE 1
INTRODUÇÃO E FUND. AOS SISTEMAS DE CONTROLE
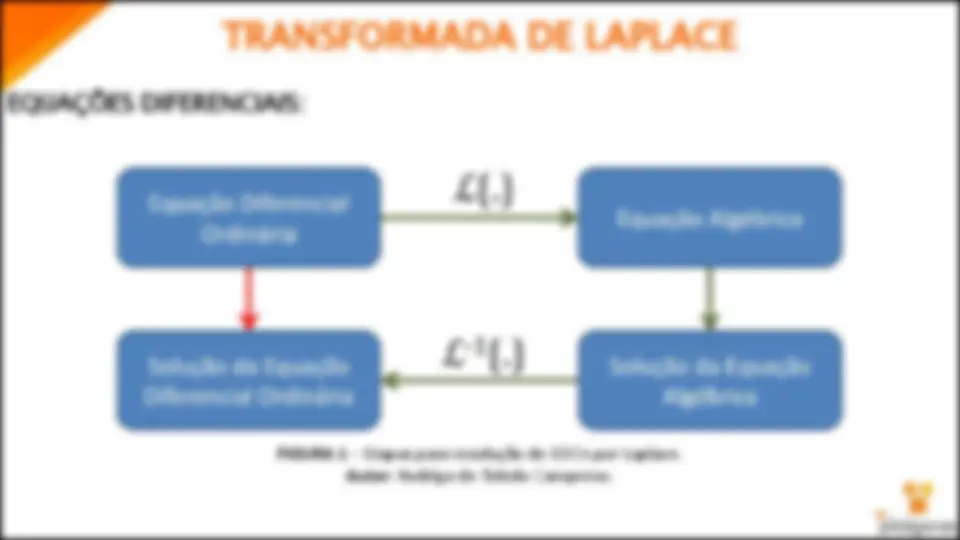
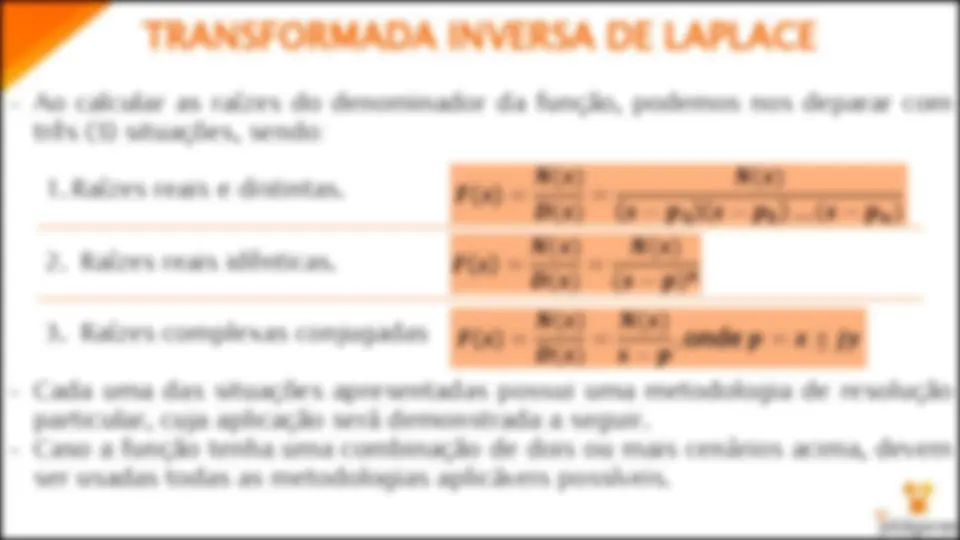
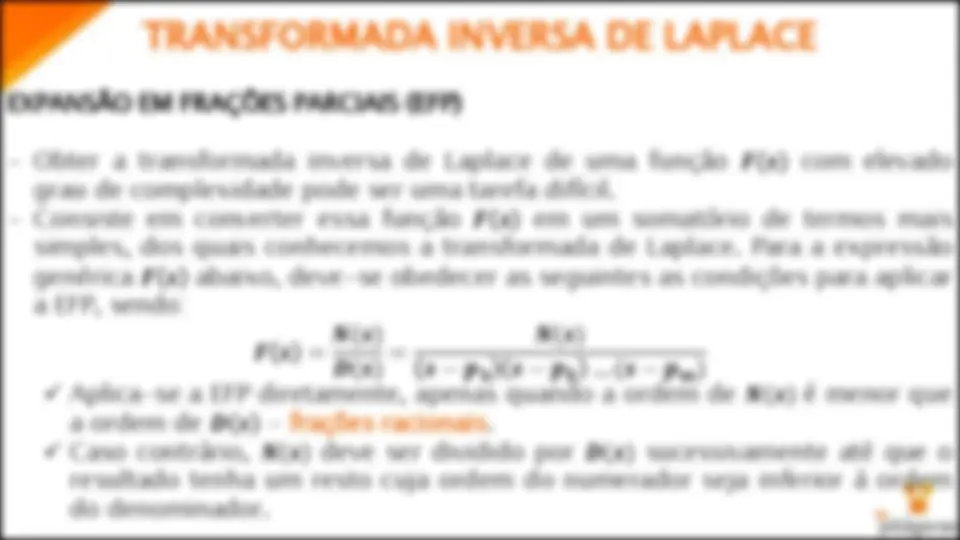
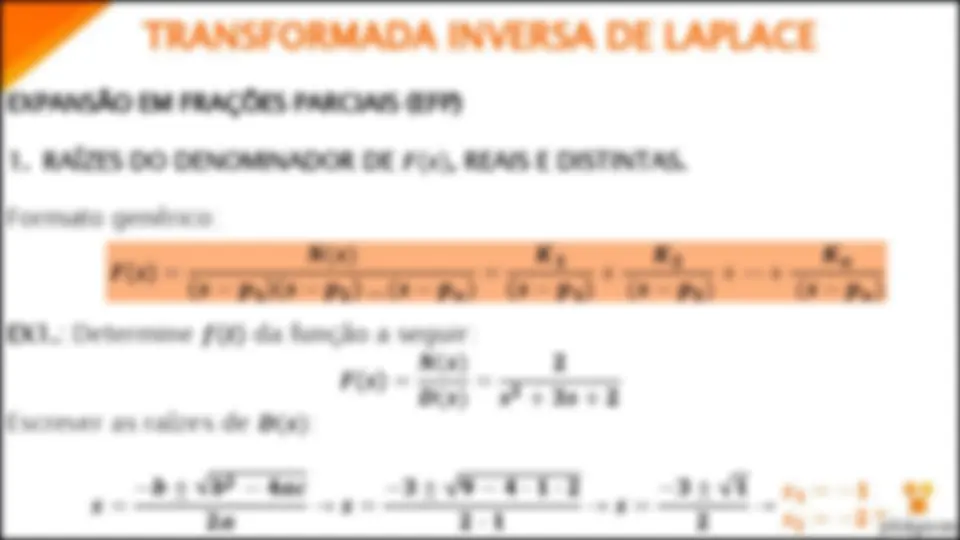
TRANSFORMADA DE LAPLACE
- OGATA, K. Engenharia de controle moderno 5 ª ed. São Paulo: Pearson Prentice Hall, 2010. APÊNDICE A e B.
- DORF, R. C., BISHOP, R. H. Sistemas de controle modernos 13 ª ed. Rio de Janeiro: LTC, 2011. CAPÍTULO 2 e APÊNDICE A.
- NISE, Norman S. Engenharia de sistemas de controle 7 ª ed. Rio de Janeiro: LTC, 2016. CAPÍTULO 2.
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- A ordem de uma EDO é dada pelo índice da sua maior derivada. Exemplos: 𝒚 ′ + 𝟑𝒚 = 𝟎 → 𝟏ª 𝐨𝐫𝐝𝐞𝐦 𝒚 + 𝟑𝒚 − 𝟐𝒕 = 𝟎 → 𝟐ª 𝐨𝐫𝐝𝐞𝐦 𝒅 𝟒 𝒚 𝒅𝒕 𝟒 − 𝟐 𝒅 𝟐 𝒚 𝒅𝒕 𝟐
Uma EDO é de ordem 𝒏, quando a n-ésima derivada
da função desconhecida 𝒚 é a derivada mais alta de
𝒚 na equação.
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- LINEAR: É dita linear se 𝒇 for linear em todas as variáveis. Exemplos de EDOs lineares com coeficientes constantes: 𝟓 𝒅 𝟒 𝒚 𝒕 𝒅𝒕 𝟒
- 𝟔, 𝟐 𝒅 𝟑 𝒚 𝒕 𝒅𝒕 𝟑
- 𝟏, 𝟖 𝒅 𝟐 𝒚 𝒕 𝒅𝒕 𝟐
- 𝟎, 𝟗 𝒅𝒚 𝒕 𝒅𝒕
- 𝟐𝟔𝒚 𝒕 = 𝟖𝒕 𝟐
- 𝐜𝐨𝐬(𝒕) 𝟑 𝒅 𝟐 𝒚 𝒕 𝒅𝒕 𝟐
- 𝟕 𝒅𝒚 𝒕 𝒅𝒕
- 𝒚 𝒕 = 𝐬𝐞𝐧(𝒕)
- Exemplos de EDOs com coeficientes variáveis: 𝟑𝒕 𝒅 𝟐 𝒚 𝒕 𝒅𝒕 𝟐
- 𝐬𝐞𝐧(𝒕) 𝒅𝒚 𝒕 𝒅𝒕
- 𝒆 𝒕 𝒚 𝒕 = 𝐜𝐨𝐬 𝟐 (𝒕) 𝟗𝒕 𝟑 𝒅𝒚 𝒕 𝒅𝒕
- [(𝟏 − 𝒄𝒐𝒔 𝒕 ] 𝒚 𝒕 = 𝟑𝒆 𝟒𝒕
- A solução da equação homogênea é muitas vezes chamada de resposta transitória (𝒚𝒕) e a solução particular (𝒚𝒔𝒔) , de resposta permanente ou estacionário.
𝐏𝐀𝐑𝐓𝐈𝐂𝐔𝐋𝐀𝐑
𝐇𝐎𝐌𝐎𝐆Ê𝐍𝐄𝐀
𝐄𝐒𝐓𝐀𝐂𝐈𝐎𝐍Á𝐑𝐈𝐀
𝐂𝐎𝐌𝐏𝐋𝐄𝐌𝐄𝐍𝐓𝐀𝐑
𝐅𝐎𝐑Ç𝐀𝐃𝐀
𝐍𝐀𝐓𝐔𝐑𝐀𝐋
𝐏𝐀𝐑𝐓𝐈𝐂𝐔𝐋𝐀𝐑
𝐓𝐑𝐀𝐍𝐒𝐈𝐓Ó𝐑𝐈𝐀
RESPOSTA COMPLETA = TRANSIENTE + REGIME ESTACIONÁRIO
𝒕
𝒔𝒔
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- NÃO-LINEAR: Geralmente de resolução analítica difícil ou mesmo impossível e não podem ser escritas de acordo com a forma geral apresentada no slide anterior. Exemplos: 𝒚 𝒅 𝟐 𝒚 𝒕 𝒅𝒕 𝟐
- 𝟕 𝒅𝒚 𝒕 𝒅𝒕
- 𝟔𝒚 𝒕 = 𝟗𝒕 𝒅𝒚 𝒕 𝒅𝒕
- 𝒚 𝟐 = 𝟒𝒕 𝒅𝒚 𝒕 𝒅𝒕
- 𝒆 𝒚 = 𝐬𝐞𝐧(𝒕)
EQUAÇÕES DIFERENCIAIS: TEOREMA DO VALOR FINAL (TVF)
- Se 𝒇 𝒕 e 𝒅𝒇 𝒕 /𝒅𝒕 forem transformáveis por Laplace e se 𝐥𝐢𝐦 𝒕→∞ 𝒇(𝒕) existir (convergir para algum valor), então:
- O TVF relaciona o comportamento de regime estacionário (permanente 𝒕 → ∞) de 𝒇 𝒕 ao comportamento de 𝒔𝑭 𝒔 nas vizinhanças de 𝒔 = 𝟎.
𝒇 ∞ = lim
𝒕→∞
𝒇(𝒕) = lim
𝒔→𝟎
11 EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- EX 1 .: Resolva a equação diferencial linear a seguir: 𝟏𝟎 𝒅𝒚 𝒅𝒕 + 𝟐𝟎𝒚 𝒕 = 𝟏𝟐𝟎 ÷ 𝟐𝟎 → 𝟏 𝟐 𝒅𝒚 𝒅𝒕 + 𝒚 𝒕 = 𝟔 → 𝟏 𝟐 𝒅𝒚 𝒅𝒕 = 𝟔 − 𝒚 𝒕 𝟐𝒅𝒕 = 𝒅𝒚 𝟔 − 𝒚 𝒕 → 𝟐 𝒅𝒕 = 𝒅𝒚 𝟔 − 𝒚 𝒕 → 𝟐𝒕 + 𝑪 = −𝐥𝐧 𝟔 − 𝒚 𝒕 𝒆 −𝟐𝒕+𝑪 = 𝟔 − 𝒚 𝒕 → 𝒚 𝒕 = 𝟔 − 𝒆 −𝟐𝒕+𝑪 Pela regra do produto da exponenciação temos que: 𝒚 𝒕 = 𝟔 − 𝒆 −𝟐𝒕+𝑪 → 𝒚 𝒕 = 𝟔 − (𝒆 −𝟐𝒕 ∙ 𝒆 𝑪 ) Como 𝒆 𝑪 é um valor absoluto ou constante, o designaremos como 𝑲, logo: 𝒚 𝒕 = 𝟔 − 𝑲𝒆 −𝟐𝒕 𝟏𝟎 𝒅𝒚 𝒅𝒕 + 𝟐𝟎𝒚(𝒕) = 𝟏𝟐𝟎
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- EX 1 .: O valor de 𝑲 pode ser calculado quando as condições iniciais são nulas, ou seja, em 𝒕 = 𝟎 , 𝒚 𝒕 = 𝟎. Fazendo 𝒚(𝟎) = 𝟎 temos: 𝟔 − 𝑲𝒆 −𝟐∙𝟎 = 𝟎 → 𝑲 = 𝟔 Substituindo o valor de 𝑲 teremos a equação geral no domínio do tempo: : 𝒚 𝒕 = 𝟔 − 𝟔𝒆 −𝟐𝒕 → 𝒚 𝒕 = 𝟔(𝟏 − 𝒆 −𝟐𝒕 )
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- EX 2 .: Para o circuito a seguir, determine a expressão temporal de 𝒗𝑪 a paritr de 𝒕 = 𝟎 quando a chave 𝒔 tem sua posição alterada de 𝒂 → 𝒃. 𝑽𝑺 𝑺
16 EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- No instante 𝒕𝟎 (𝒕 = 𝟎𝐬) o capacitor inicia sua descarga. Ao aplicarmos a LKC ao nó superior (𝒂) teremos que 𝒊𝑪 + 𝒊𝑹 = 𝟎.
- A constante de integração ( 𝑲 ) deve ser escolhida de modo a garantir a condição inicial, ou seja, 𝒗𝑪 𝟎 = 𝑽𝟎. Portanto:
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- Substituindo o valor de 𝑲 na equação do slide anterior, temos: 𝐥𝐧 𝒗𝑪 = − 𝒕 𝑹𝑪
- 𝐥𝐧 𝑽𝟎 →= 𝐥𝐧 𝒗𝑪 − 𝐥𝐧 𝑽𝟎 = − 𝒕 𝑹𝑪
- Aplicando a propriedade da divisão logarítmica, temos: 𝐥𝐧 𝒗𝑪 𝑽𝟎 = − 𝒕 𝑹𝑪 → 𝒗𝑪 𝑽𝟎 = 𝒆 − 𝒕 𝑹𝑪 (^) →
𝒄
𝟎
− 𝒕 𝑹𝑪
𝒄
𝟎
− 𝒕 𝝉
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS (EDOs)
- Para os circuitos RC dos exercícios 2 e 3 temos: 𝒗𝑪(𝒕) = 𝑽𝟎𝒆 − 𝒕 𝑹𝑪 (^) → REPOSTA NATURAL (𝒗 𝒕) 𝒗𝑪(𝒕) = 𝑽𝒔 𝟏 − 𝒆 − 𝒕 𝑹𝑪 (^) → REPOSTA FORÇADA (𝒗 𝒔𝒔)
- Resposta completa para o circuito RC é dada por 𝒗𝑪 𝒕 = 𝒗𝒕 + 𝒗𝒔𝒔 , logo: 𝒗𝑪 𝒕 = 𝑽𝟎𝒆 − 𝒕 𝑹𝑪 (^) + 𝑽 𝒔 𝟏^ −^ 𝒆 − 𝒕 𝑹𝑪 (^) → 𝒗 𝑪 𝒕^ =^ 𝑽𝟎𝒆 − 𝒕 𝑹𝑪 (^) + 𝑽 𝒔 +^ 𝑽𝒔𝒆 − 𝒕 𝑹𝑪
𝑪
𝒔
𝟎
𝒔
− 𝒕 𝑹𝑪
𝑪
𝒔
𝒔
𝟎
− 𝒕 𝑹𝑪
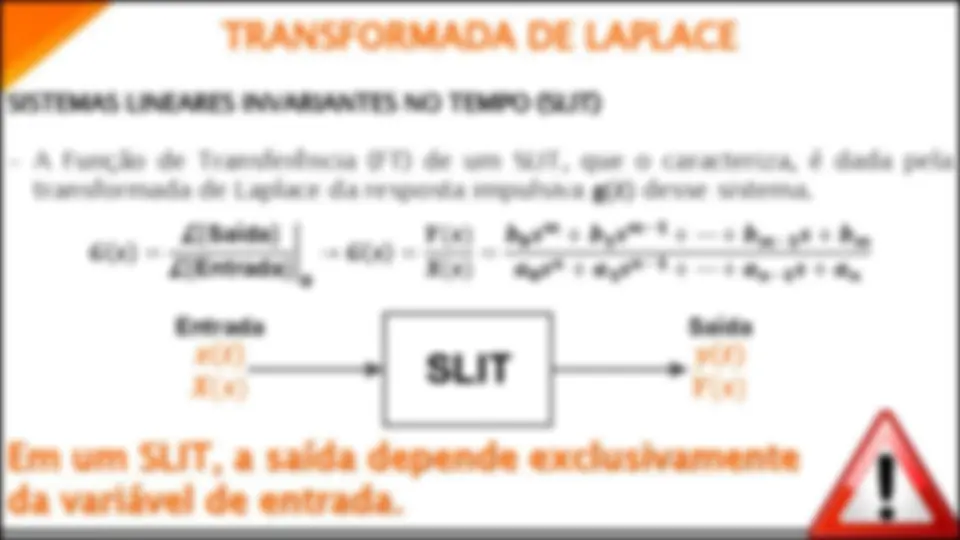
SISTEMAS LINEARES INVARIANTES NO TEMPO (SLIT)
- Seja o sistema definido pela equação a seguir, onde 𝒚 é a saída e 𝒙 é a entrada: 𝒂𝟎𝒚 𝒏
- 𝒂𝟏𝒚 𝒏−𝟏
- ⋯ + 𝒂𝒏−𝟏𝒚 ′
- 𝒂𝒏𝒚 = 𝒃𝟎𝒙 𝒎
- 𝒃𝟏𝒙 𝒎−𝟏
- ⋯ + 𝒃𝒎−𝟏𝒙 ′
- 𝒃𝒎𝒙, (𝒏 > 𝒎)
- DEFINIÇÃO: Os SLITs são sistemas dinâmicos cujos coeficientes das equações diferenciais 𝒂𝒊 e 𝒃𝒊 são constantes (EDO com coeficientes constantes).
- Um sistema é dito linear se o princípio da superposição se aplicar a ele.
- Sendo 𝒙(𝒕) a entrada e 𝒚(𝒕) a saída, um o sistema é invariante no tempo, se 𝒙(𝒕 − 𝝉) gerar uma resposta 𝒚(𝒕 − 𝝉) , isto é, se a entrada é atrasada por 𝝉 segundos, então a saída também será atrasada por 𝝉 segundos.