Baixe Teoria Introdução 2006 e outras Notas de aula em PDF para Mecatrônica, somente na Docsity!
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
1.1 Introdução
Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs da América, um robô é um manipulador re-programável, multifuncional, projetado para mover materiais, peças, ferramentas ou dispositivos específicos através de movimentos variáveis e programáveis, para o desempenho de uma variedade de tarefas.
Um robô é constituído por:
a) Uma Estrutura Mecânica ou Manipulador:
Seqüência de corpos rígidos, denominados “ligamentos” ou membros, conectados por articulações, chamadas de “juntas”.
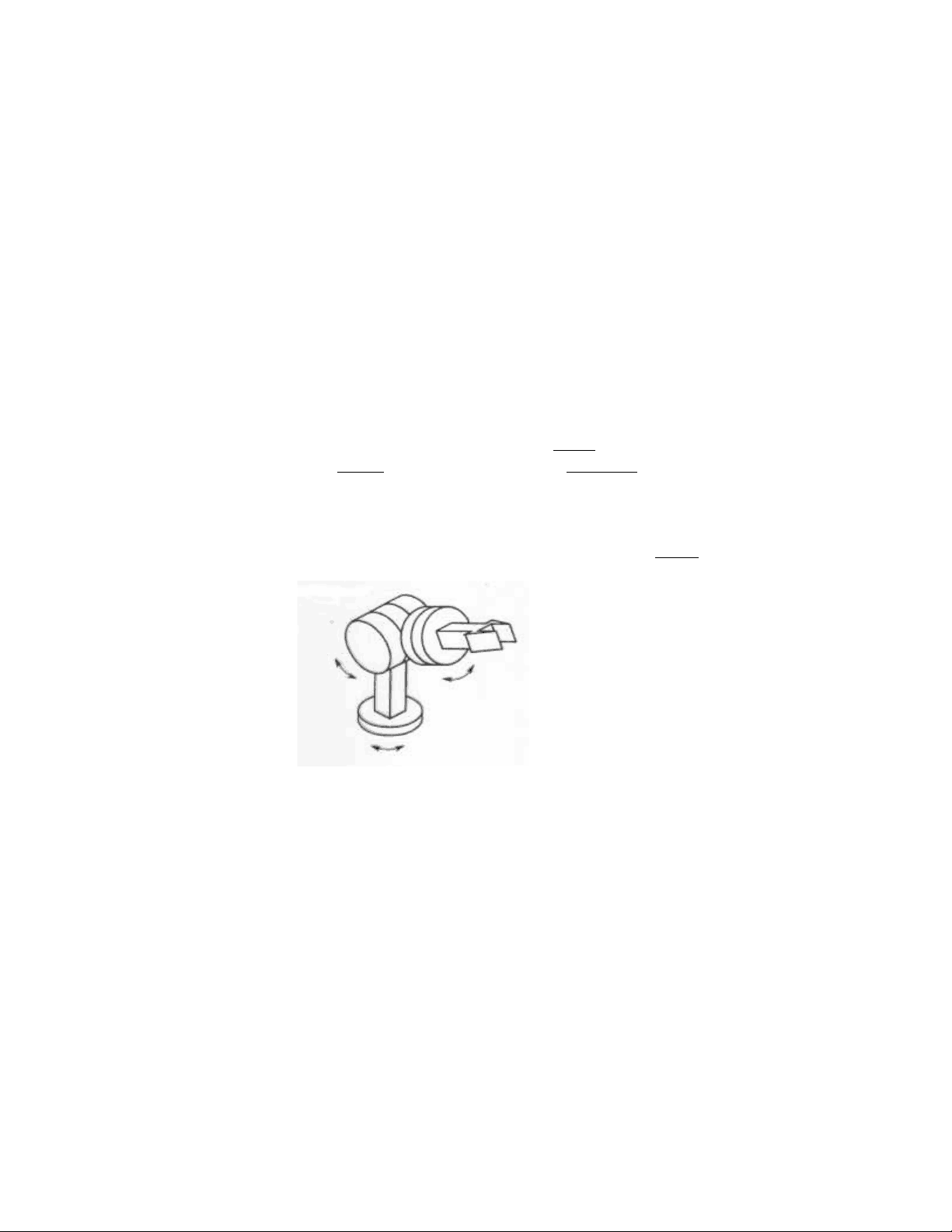
Um manipulador é constituído por um braço (provedor de mobilidade), geralmente, um punho (para a destreza), e um efetuador (ferramenta de trabalho do robô). O tipo de punho que proporciona o maior grau de destreza é formado por três juntas de rotação (Fig.1.1). O efetuador, ligado ao punho, está localizado no extremo do manipulador. Este pode ser, por exemplo, uma ferramenta de torque, de solda, um eletromagneto, ou uma garra.
Figura 1.1 Punho Esférico.
b) Atuadores
Colocam o manipulador em movimento através do acionamento das juntas. Os tipos de acionamento utilizados são os elétricos, hidráulicos, e, em menor escala, os pneumáticos.
c) Sensores
Medem o status interno do robô, tais como posição e velocidade de juntas. Ocasionalmente, incluem-se sensores, tais como, câmeras CCD, que fornecem informação sobre elementos externos ao manipulador.
d) Sistema de Controle
Possibilita o planejamento, controle e supervisão do movimento do manipulador.
1.2 Estrutura dos Manipuladores
A estrutura mais comum é a cadeia cinemática aberta. Do ponto de vista topológico, uma cadeia é aberta quando só há uma seqüência de ligamentos conectando duas extremidades (podem incluir juntas ou o efetuador) da cadeia (Fig. 1.2).
Figura 1.2. Cadeia Cinemática Aberta.
Quando a seqüência de ligamentos entre extermidades consideradas forma um laço, ou, em geral, quando uma junta se liga a mais de duas juntas (Fig. 1.3), temos uma cadeia cinemática fechada.
Figura 1.3. Cadeia Cinemática Fechada.
1.3 Características das Articulações
A mobilidade do manipulador é assegurada pelas juntas, ou articulações. Estas podem ser de dois tipos:
- Prismática, que proporciona a translação do ligamento a ela unido;
- Revolução, que proporciona a rotação do ligamento a ela unido.
As juntas prismáticas são responsáveis pelos movimentos de translação relativa entre dois ligamentos. As juntas de revolução são responsáveis pelo movimento de
Figura 1.4. Manipulador Cartesiano.
1.4.2 Robô Cilíndrico
Esse tipo de manipulador possui 2 articulações prismáticas e uma de rotação. Esta última substitui a primeira junta prismática do manipulador cartesiano. O grau de exatidão no posicionamento decai conforme o alcance do braço aumenta. O volume de trabalho é um cilindro vazado (Fig.1.5).
Figura 1.5. Manipulador Cilíndrico.
1.4.3 Robô Esférico
Os eixos de movimento formam um sistema de referência polar, através de 1 junta prismática e 2 juntas de rotação. Tomando o manipulador cilíndrico como referência, substitui-se a primeira junta prismática, a partir da base, por uma junta de rotação. A rigidez mecânica é inferior comparativamente aos dois casos anteriores. A exatidão de posicionamento é inversamente proporcional ao alcance radial da extremidade do braço. O volume de trabalho gerado é, aproximadamente, uma esfera (Fig.1.6).
Figura 1.6. Manipulador Esférico.
1.4.4 Robô SCARA (“Selective Compliance Assembly Robot”)
Possui 2 juntas de rotação, cujos eixos são paralelos, para se movimentar o efetuador num plano, e uma terceira junta, prismática, perpendicular a esse plano. Ele é muito usado em tarefas de montagem de componentes de pequenas dimensões, como placas de circuitos eletrônicos. O volume de trabalho é aproximadamente cilíndrico (Fig.1.7).
Figura 1.7. Robô SCARA.
1.4.5 Robô Articulado ou Antropomórfico
Nesta configuração, existem pelo menos 3 juntas de rotação. O eixo de rotação da junta da base é perpendicular aos eixos das outras 2 juntas, que são paralelas entre si. Esta configuração apresenta maior mobilidade, entre todas as outras empregadas. O seu volume de trabalho é complexo, uma porção de esfera (Fig. 1.8). A rigidez depende da posição no volume de trabalho.
Exatidão. Exatidão é a medida de quão perto se pode posicionar um mecanismo de uma posição especificada no espaço.
Repetibilidade. Repetibilidade é a medida de quão perto se pode posicionar um mecanismo de um ponto previamente armazenado.
Comprando os conceitos de exatidão e repetibilidade, observa-se que exatidão está relacionada ao erro de posicionamento absoluto, enquanto repetibilidade está relacionada ao erro de posicionamento relativo.
A Figura 1.9 apresenta dois exemplos desses conceitos. Nessa figura, os pontos marcados com asteriscos (*) são as posições alcançadas pelo mecanismo quando recebe o comando para se posicionar na posição desejada marcada com a cruz (+). Os pontos marcados com uma bola ( ) representam a média das posições alcançadas pelo mecanismo. No caso 1 o sistema apresenta uma boa repetibilidade mas uma baixa exatidão, enquanto que o sistema do caso 2 apresenta boa repetibilidade e exatidão. A dispersão das
posições em torno da média, representada pela distância σ, define a repetibilidade do
sistema. A distância entre a posição desejada e a posição média dos posicionamensto, representada pela distância d , define a exatidão do sistema.
d
Caso 1: Sistema apresenta alta repetibilidade e baixa exatidão.
Caso 2: Sistema apresenta alta repetibilidade e boa exatidão.
d
Legenda: (*) Posições alcançadas pelo mecanismo; (+) Posição desejada para o mecanismo; ( ) Média das posições alcançadas pelo mecanismo.
Figura 1.9: Exemplos dos conceitos de repetibilidade e exatidão.
Os robôs industriais possuem alta repetibilidade sem, no entanto apresentar boa exatidão. Um número bem representativo da repetibilidade dos braços robóticos industriais é 0,1 mm. Porém, existem robôs mais precisos, como os robôs do tipo SCARA, que apresentam repetibilidade da ordem de 0,01mm.
1.6. Especificação de um robô industrial
Os critérios de especificação de um robô industrial incluem:
- Volume de trabalho
- Ambiente
- Carga útil
- Velocidade (garra → 1,5 a 2,0 m/s)
- Repetibilidade (voltar a uma posição sem erro);
- Exatidão (posição absoluta, desvio padrão);
- Resolução (menor medida do sistema de sensoriamento);
- Termos de programação
- Tipo de atuador
1.7 Aplicações Principais
Soldagem a ponto; Pintura; Manipulação de materiais; Colagem; Paletização; Montagens; Corte de materiais; Soldagem a arco; outras...