Baixe cap2 parte1 06 e outras Notas de aula em PDF para Mecatrônica, somente na Docsity!
2-TRANSFORMAÇÃO DE COORDENADAS:
PARÂMETROS DE REPRESENTAÇÃO
2.1 Cossenos Diretores e a Matriz de Rotação
Sejam dois sistemas cartesianos, um de referência, e outro fixo num corpo rígido, definidos pelos sistemas ( i , j , k )
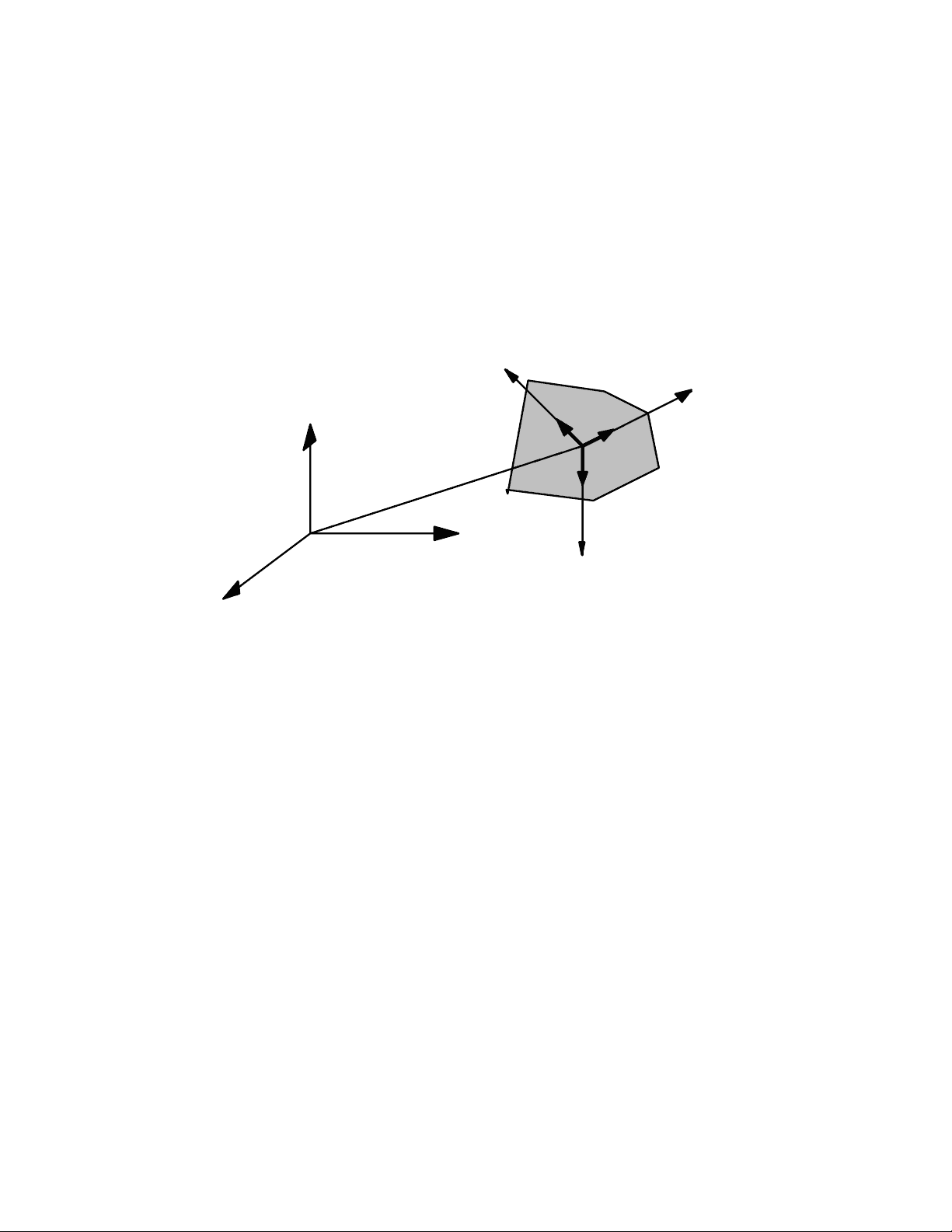
r r r e ( n , t , b ) r r r , respectivamente, que são sistemas ortonormais positivos. Interessa-nos exprimir as coordenadas a relação entre os dois sistemas de coordenadas correspondentes (Fig. 2.1), ou seja, ( x , y , z )e ( xb , yb , zb ).
O
x
y
z
Corpo rígido
x
z y
O'
n
b
t
b
b b
Figura 2.1. Relação entre 2 os sistemas “inercial” e fixo no corpo rígido.
Podemos expressar os versores do sistema fixo no corpo em função dos versores do sistema inercial:
b b i b j b k
t t i t j t k
n n i n j n k
r r r r r r r
r r r r r r r
r r r r r r^ r
cos( , ) cos( , ) cos( , )
cos( , ) cos( , ) cos( , )
cos( , ) cos( , ) cos( , )
x y z
x y z
x y z
Ou seja, na forma matricial, temos:
cos( , )
cos( , )
cos( , )
cos( , )
cos( , )
cos( , )
cos( , )
cos( , )
cos( , )
z
y
x
z
y
x
z
y
x
b
b
b
eb
t
t
t
,t
n
n
n
n
r
r
r
r
r
r
r
r
r
r
r
r
Cada um desses vetores é uma das colunas da matriz de rotação, que transforma as coordenadas medidas no sistema fixo no corpo, nas coordenadas do sistema de referência:
R [ n , t, b ]
r r r
Ou seja,
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
cos( , ) cos( , ) cos( , )
cos( , ) cos( , ) cos( , )
cos( , ) cos( , ) cos( , )
z z z
y y y
x x x
R
n t b
n t b
n t b
r r^ r
r r r
r r^ r
Uma propriedade importante é a ortogonalidade da matriz de rotação:
R R
i.b j.b k.b
i.t j.t k.t
i.n j.n k.n
k.n k.t k.b
j.n j.t j.b
i.n i.t i.b
b b b
t t t
n n n
n t b
n t b
n t b
RR
T
T
rr rr r r
rr rr rr
rr rr rr
rr rr rr
rr rr rr
rr rr rr
r r r
r r r
r r r
r r^ r
r r r
r r^ r
cos( , ) cos(, ) cos( , )
cos(, ) cos(, ) cos(, )
cos( , ) cos(, ) cos( , )
cos( , ) cos(, ) cos( , )
cos( , ) cos(, ) cos(, )
cos( , ) cos(, ) cos( , )
x y z
x y z
x y z
z z z
y y y
x x x
Esse resultado nos mostra que, apesar de 9 parâmetros serem usados para relacionar os 2 sistemas de coordenadas, a ortogonalidade da matriz de rotação implica em 6 relações
necessárias entre os versores ( i , j , k )
r r r ou ( n , t , b )
r r r , correspondente aos produtos escalares
entre os mesmos. Isto sugere que somente 3 parâmetros independentes poderiam ser suficientes para definir a matriz de rotação, o que é uma das motivações para as outras representações de transformação entre sistemas de coordenadas apresentadas nas próximas seções.
Se é conhecida a velocidade angular do corpo rígido em relação ao sistema de referência, a variação da matriz de cossenos diretores com o tempo pode ser facilmente calculada. Para justificar tal afirmação, basta considerar a derivada de um vetor arbitrário, que, de antemão impomos que seja constante:
é constante ⇒ X' = 0 ⇒ RX + RX = 0
= ' & &^ &
' X
X RX
Por outro lado, um resultado conhecido da mecânica, o qual relaciona a derivada absoluta de um vetor com a sua variação num sistema móvel, implica em:
Z
Y
X
Figura 2.2. Sistema de Referência, fixo na terra (considerado inercial).
- Rotação em torno de “Z”: X, Y, Z ⇒x’, y’, z’ (= Z) y’ ψ Z Y
z' Z
y' Xsen Ycos
x' Xcos Ysen
=
=− +
= + ψ ψ
ψ ψ
X x’ Figura 2.3 Movimento de “Yaw”.
- Rotação em torno de y’: x’,y’, z’ ⇒ x”, y” (=y’), z”.
Φ
r & Ψ
r &
z’ θ
z” θ θ
θ θ
z" x'sen z' cos
y" y'
x" x'cos z'sen
= +
=
= −
x’ x” Figura 2.4. Movimento de “Pitch”.
- Rotação em torno de x”: x” , y”, z” ⇒x (= x”), y, z. y” y
φ φ φ
φ φ z y"sen z" cos
y y"cos z"sen
x x"
=− +
= +
=
z” Ψ cos θ
r &
z Θ
r & Figura 2.5. Movimento de “Roll”.
As relações entre os sistemas de coordenada sucessivos, expostas nas figuras 2, 3 e 4, na forma matricial ficam:
Z
Y
X
sen
sen
z
y
x
cos 0
cos 0
z
y
x
sen
sen
z
y
x
0 cos
cos 0
z
y
x
sen
sen z
y
x
0 cos
0 cos
Utilizando a composição de rotações, a matriz de rotação que relaciona o sistema original e o atual fica:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
Z
Y
X R Z
Y
X R R R z
y
x x' x x' x" x" x 0 0
em termos dos ângulos de Euler, a matriz final de rotação, que é obtida pela multiplicação das anteriores. Ou seja, relação entre as coordenadas do sistema original (fixo) e o sistema de coordenadas solidário ao corpo rígido (móvel) resulta do produto entre as matrizes na ordem correspondente à seqüência de rotações definidas acima:
Z
Y
X
(sen sen cos sen cos ) ( senψ sencosφ sen cos ) cos cos
(cos sen sen sen cos ) (cos cos sen sen sen ) cos sen
cos cos sen cos sen
z
y
x
Note que esta, sendo a matriz de rotação, possui a propriedade de ortogonalidade demonstrada anteriormente, o que facilita o cálculo de sua inversa. Uma vez conhecida a matriz de rotação num instante qualquer, sua evolução no tempo pode ser determinada conhecendo-se a velocidade angular do referencial móvel.
As derivadas dos ângulos de Euler são representadas nos diagramas anteriores , através dos
vetores ΨΘ
r &
r & (^) , e Φ
r & (^). Podemos determinar estes vetores a cada instante, a partir dos valores da
velocidade de arrastamento do referencial móvel expressa nos eixos deste mesmo referencial. Ou seja, suponha conhecidos (através de sensores inerciais, por exemplo) os